
热门标签
热门文章
- 1数组、运算符、流程控制的基本介绍及示例_数组逻辑运算符有哪些
- 2SpringBoot-社区共享书屋-03656(免费领源码+开发文档)可做计算机毕业设计JAVA、PHP、爬虫、APP、小程序、C#、C++、python、数据可视化、大数据、全套文案
- 3关于Mongodb的全面总结,学习mongodb的人,可以从这里开始!_mogodb 有点抽象
- 4git clone远程仓库的分支_git clone 制定分支 也会下载全部仓库
- 5如何解决 Git 仓库嵌套问题
- 6MySQL 8 创建只读用户并授予查询权限SQL_mysql8.0创建只读用户
- 7npm install digital envelope routines::unsupported解决方法
- 8pyplot显示和保存没有边框的图片_img.sum(axis=2)
- 9如何在github上建立个人主页_github个人主页网址
- 10信息安全工程师——知识点总结(一)_信息安全工程师考试知识点
当前位置: article > 正文
matlab 机器人逆运动学求解_机器人逆运动学末端位置需要什么数据
作者:小丑西瓜9 | 2024-05-24 00:41:02
赞
踩
机器人逆运动学末端位置需要什么数据
鱼弦:CSDN内容合伙人、CSDN新星导师、全栈领域创作新星创作者 、51CTO(Top红人+专家博主) 、github开源爱好者(go-zero源码二次开发、游戏后端架构 https://github.com/Peakchen)

机器人DH参数从左到右依次是连杆长度,连杆转角,连杆偏距和关节角,求该机器人的逆解。包括计算过程还有matlab实现程序。
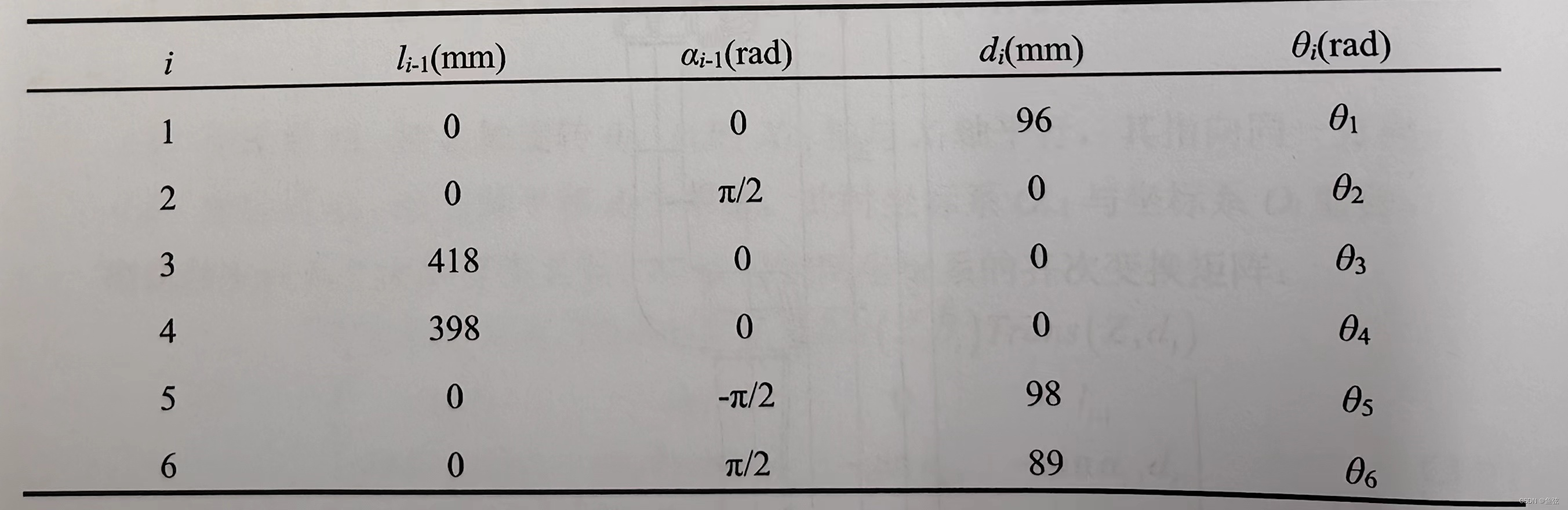
Matlab 可以用于计算机器人的逆运动学,特别是基于 Denavit-Hartenberg (DH) 参数的机器人。DH参数的顺序通常是连杆长度 (a)、连杆转角 (α)、连杆偏距 (d) 和关节角 (θ)。机器人的逆解需要进行坐标变换和数学运算。下面是详细解释、底层架构流程图、使用场景以及一些文献材料链接,以及当前一些在使用的产品:
1. 原理详细解释:
机器人的逆运动学解决方案旨在根据机器人末端执行器的位姿来确定关节角度,使得机器人能够达到特定的位置和姿态。在使用DH参数时,你可以按照以下步骤执行逆运动学求解:
- 定义每个连杆的DH参数 (a, α, d, θ)。
- 建立坐标系,以每个关节的原点为起点,并根据DH参数定义坐标系之间的转换关系。
- 组合这些坐标系变换来计算末端执行器的位姿 (位置和姿态)。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/615024
推荐阅读
相关标签

