
热门标签
热门文章
- 1汽车电子相关术语_ivi和domain controller
- 2iOS技术之Xcode 15打包报错:Command PhaseScriptExecution failed with a nonzero exit code_xcode15.3 真机 command phasescriptexecution failed w
- 3socket编程一:socket是什么?套接字是什么?_socket编程 为什么是socket
- 4关于前端技术文章_前端写一个关于技术方面的文章
- 5C-Pack论文解读
- 6mysql忘记密码怎么解决_mysql 忘记密码,通宵都要看完这个大数据开发关键技术点_进入mysql 密码
- 7vscode配置c++11_vscode c++11
- 8YOLOv8算法改进【NO.100】引入最新发布AKConv_改进yolov8
- 9Flink 内容分享(六):Fink原理、实战与性能优化(六)_flinkvalue.f0
- 10uniapp导入导出Excel_uniapp 导出导入
当前位置: article > 正文
ROS Qt5 librviz人机交互界面开发三(实现控制机器人速度与方向)_人机交互 键盘控制机器人程序
作者:小丑西瓜9 | 2024-05-25 20:35:48
赞
踩
人机交互 键盘控制机器人程序
本系列教程文章专栏:
本系列课程已上线古月学院,欢迎感兴趣的小伙伴订阅:
开发交流QQ群: 797497206
完整项目代码:
github
我这里主要就是参考
teleop_twist_keyboard 项目的源代码,移植到自己程序
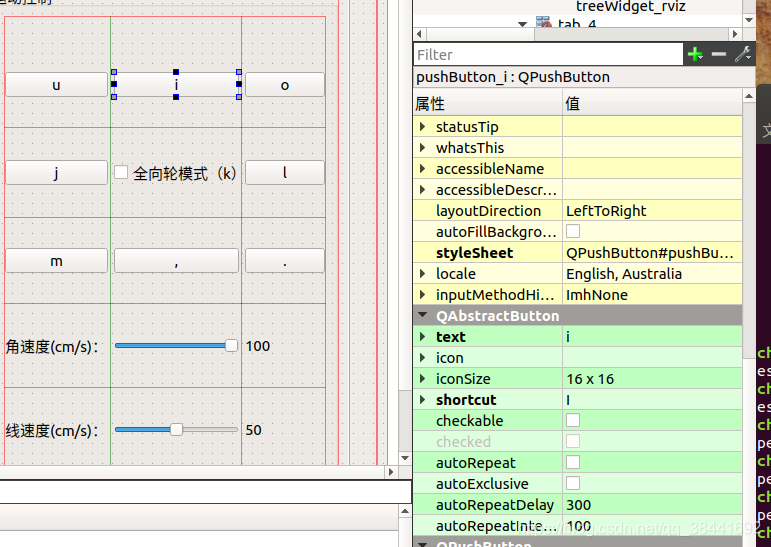
一,首先在ui界面添加按钮(注意按钮上显示的文字):
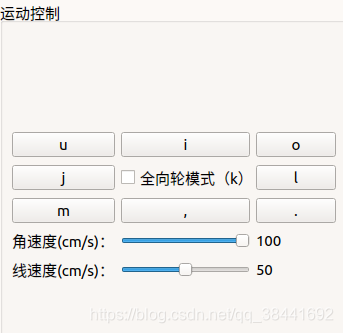

同时在ui界面设置每个按钮的shortcut,就能实现键盘控制:
二,关联这些按钮的点击事件到同一槽函数
//绑定速度控制按钮
connect(ui.pushButton_i,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_u,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_o,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_j,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_l,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_m,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_back,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_backr,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
槽函数:
//速度控制相关按钮处理槽函数 void MainWindow::slot_cmd_control() { QPushButton* btn=qobject_cast<QPushButton*>(sender()); char key=btn->text().toStdString()[0]; //速度 float liner=ui.horizontalSlider_linear->value()*0.01; float turn=ui.horizontalSlider_raw->value()*0.01; bool is_all=ui.checkBox_use_all->isChecked(); switch (key) { case 'u': qnode.move_base(is_all?'U':'u',liner,turn); break; case 'i': qnode.move_base(is_all?'I':'i',liner,turn); break; case 'o': qnode.move_base(is_all?'O':'o',liner,turn); break; case 'j': qnode.move_base(is_all?'J':'j',liner,turn); break; case 'l': qnode.move_base(is_all?'L':'l',liner,turn); break; case 'm': qnode.move_base(is_all?'M':'m',liner,turn); break; case ',': qnode.move_base(is_all?'<':',',liner,turn); break; case '.': qnode.move_base(is_all?'>':'.',liner,turn); break; } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
创建发布者:
//速度控制话题
cmd_pub = n.advertise<geometry_msgs::Twist>("cmd_vel", 1);
- 1
- 2
qnode.move_base:
//发布机器人速度控制 void QNode::move_base(char k,float speed_linear,float speed_trun) { std::map<char, std::vector<float>> moveBindings { {'i', {1, 0, 0, 0}}, {'o', {1, 0, 0, -1}}, {'j', {0, 0, 0, 1}}, {'l', {0, 0, 0, -1}}, {'u', {1, 0, 0, 1}}, {',', {-1, 0, 0, 0}}, {'.', {-1, 0, 0, 1}}, {'m', {-1, 0, 0, -1}}, {'O', {1, -1, 0, 0}}, {'I', {1, 0, 0, 0}}, {'J', {0, 1, 0, 0}}, {'L', {0, -1, 0, 0}}, {'U', {1, 1, 0, 0}}, {'<', {-1, 0, 0, 0}}, {'>', {-1, -1, 0, 0}}, {'M', {-1, 1, 0, 0}}, {'t', {0, 0, 1, 0}}, {'b', {0, 0, -1, 0}}, {'k', {0, 0, 0, 0}}, {'K', {0, 0, 0, 0}} }; char key=k; //计算是往哪个方向 float x = moveBindings[key][0]; float y = moveBindings[key][1]; float z = moveBindings[key][2]; float th = moveBindings[key][3]; //计算线速度和角速度 float speed = speed_linear; float turn = speed_trun; // Update the Twist message geometry_msgs::Twist twist; twist.linear.x = x * speed; twist.linear.y = y * speed; twist.linear.z = z * speed; twist.angular.x = 0; twist.angular.y = 0; twist.angular.z = th * turn; // Publish it and resolve any remaining callbacks cmd_pub.publish(twist); ros::spinOnce(); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
三,完整开源项目
在我自己学习的过程中目前发现没有相关类似完整开源项目,为了帮助其他人少走弯路,我决定将自己的完整项目开源:
github
创作不易,如果本教程对你有帮助,关注或点个赞吧,或者github标个星哦~~
您的支持就是我最大的动力~
(转载请注明作者和出处:https://blog.csdn.net/qq_38441692 未经允许请勿用于商业用途)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/623694
推荐阅读
相关标签

