
热门标签
热门文章
- 1Windows 远程控制 Mac 电脑怎么操作_window怎么远程控制苹果电脑
- 2负载均衡及其常见实现方式_负载访问机制是什么
- 3软件测试人员应该怎样做好需求分析_it行业中软件测试工程师需要些需求分析吗
- 4Python打印圣诞树_pycharm圣诞树
- 5Pycharm乱码解决大全_pycharm控制台中文乱码
- 6Django学习笔记:Bootstrap框架基础_djang中boostrap作用
- 7C语言进阶——likely和unlikely_c语言 unlikely
- 8️️ 爬虫技术初探:如何安全高效地采集网络信息
- 9Linux:安装jdk的三种方法(yum+rpm+下载包)_linux安装jdk
- 10GPTQ~
当前位置: article > 正文
STM32F103C8T6的定时器输出PWM,控制舵机和电机,STM32CubeMX和Hal库程序_stm32f103c8t6输出pwm
作者:小小林熬夜学编程 | 2024-03-24 11:37:39
赞
踩
stm32f103c8t6输出pwm
采用STM32F103C8T6的定时器,输出PWM信号,用于控制模型车的舵机和电机速度。
采用的是STM32CubeMX和Hal库函数程序。
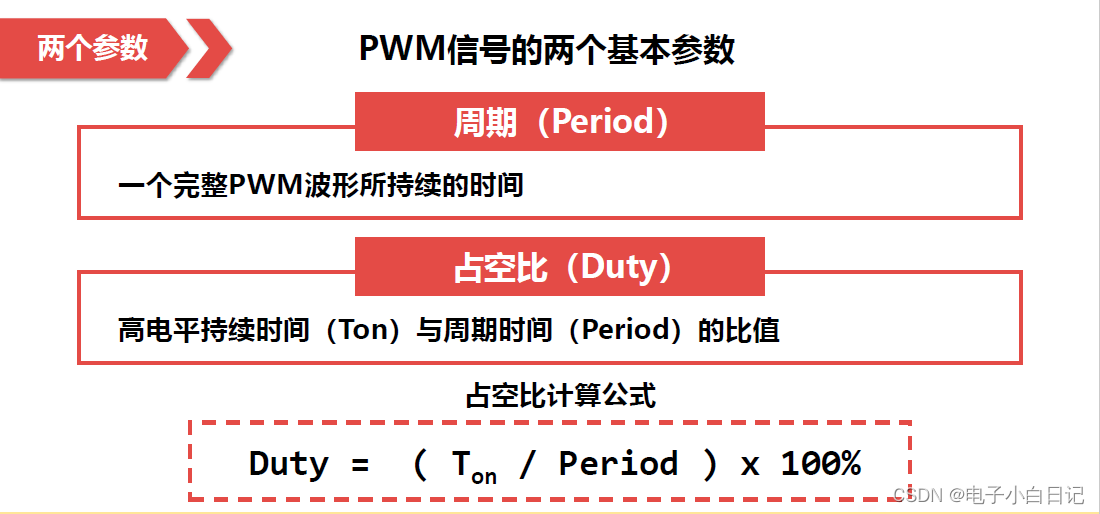
常规舵机和电调的PWM信号
舵机和电调的PWM信号的周期通常为20ms。
对于舵机,高电平部分时间一般为0.5ms~2.5ms范围内调整角度,0.5ms对应0°,1ms对应45°,1.5ms对应90°,2ms对应135°,2.5ms对应180°。
对于电机电调,高电平部分时间一般为1ms~2ms,1.5ms是归中,1ms和2ms分别为前进和后退的满速度。
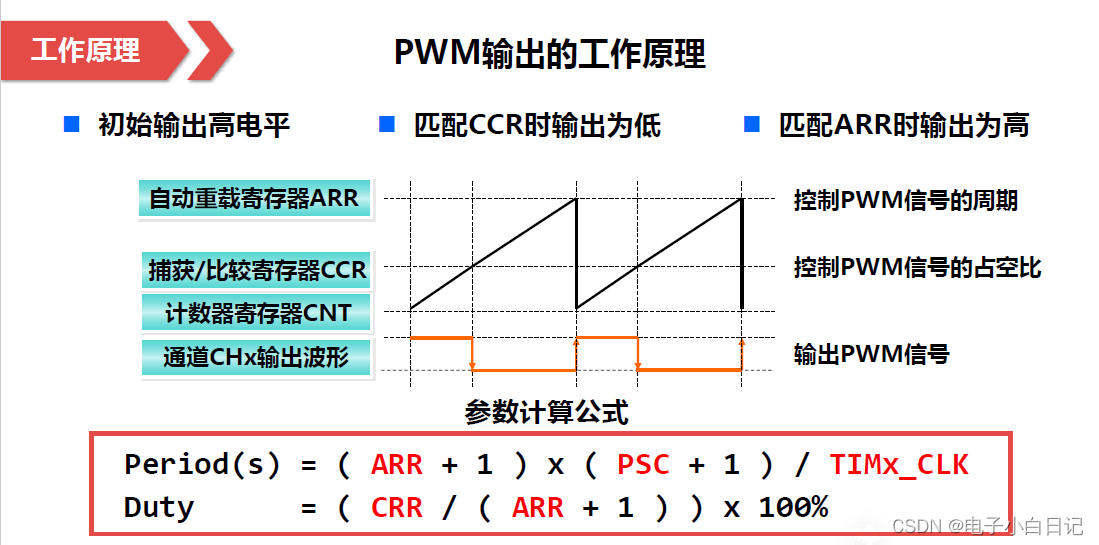
定时器的PWM输出功能
STM32CubeMX配置
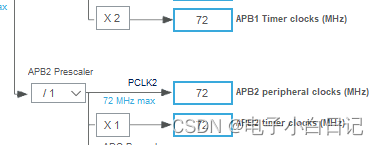
STM32F103C8T6定时器时钟设置为72MHz
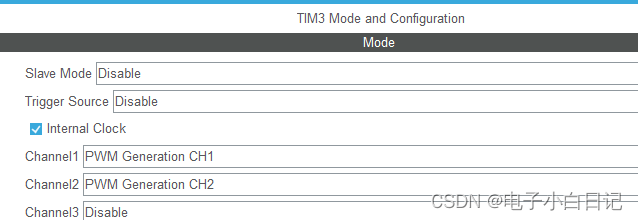
采用TIM3定时器产生PWM信号
PSC设定为719,ARR设定为1999,用于产生20ms脉冲周期。
将遥控器的摇杆电位器通过ADC采集,并转化为0-100数字,此时CRR为0-100数字+100,就可以得到1ms~2ms的高电平占比
程序部分
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
- 1
- 2
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,(controler_data[0]+100));
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,(controler_data[1]+100));
- 1
- 2
模型车轮子方向归正和马达零速代码块
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,150);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,150);
- 1
- 2
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/302100
推荐阅读
相关标签

