
- 1【送书福利-第三十八期】《 SaaS产品实践方法论:从0到N构建SaaS产品》
- 26-闭包和装饰器_带参数的装饰器。定义一个没有参数的函数foo,用于输出语句;定义一个装饰器函
- 3迅为RK3568开发板Debian系统安装ToDesk_debian rk3568版本
- 4php 生成水印输出图片,PHP的生成图片或文字水印的类
- 5SpringBoot3.x整合Nacos和Redis
- 6365天挑战LeetCode1000题——Day 109 贝壳周赛
- 7kubernetes 二进制部署
- 8Mysql-基本练习(07-修改表-添加主键、唯一、外键约束、添加/删除默认约束、删除约束)_alter table tb1 drop foreign key tb1____ibfk ____1
- 9神经网络学习笔记——神经网络基础(一)
- 10SpringBoot如何正确连接SqlServer_spring sqlserver
无人机编队控制算法(基于一致性理论的编队控制)
赞
踩
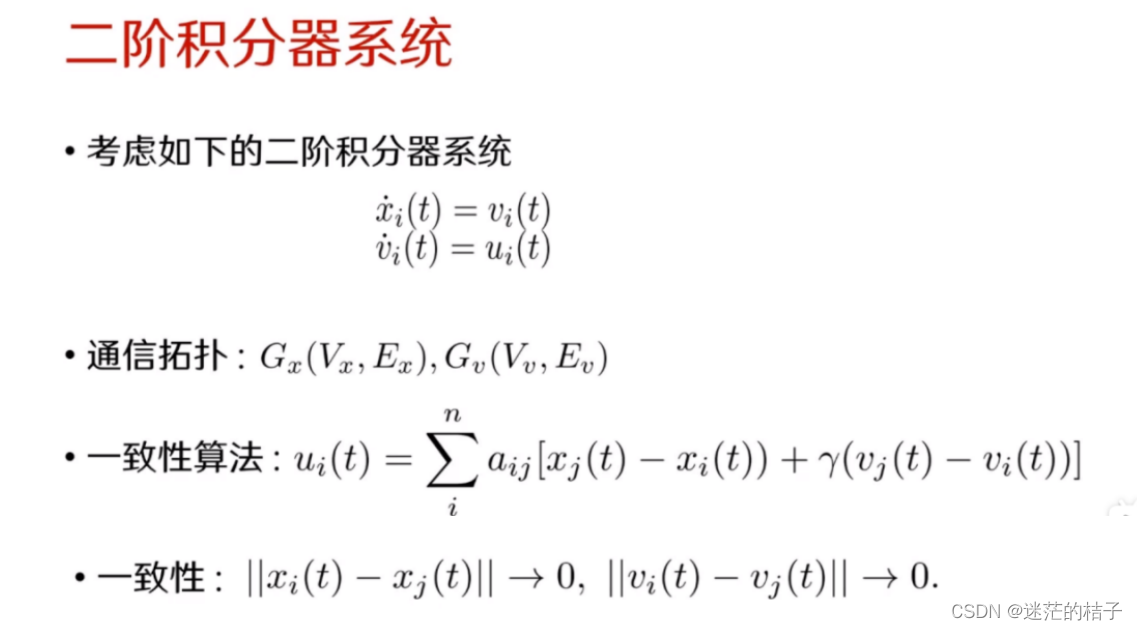
基于一致性的控制策略是解多智能体系统控制问题的有效途径。达成一致性的目的是促使该整体所有成员的状态保持一致。
本文研究的一致性编队控制是刘腾飞的一篇论文:
Distributed formation control of nonholonomic mobile robots without global position measurements
原文链接如下:(需要翻墙才能进哦)
https://www.sciencedirect.com/science/article/pii/S0005109812005675


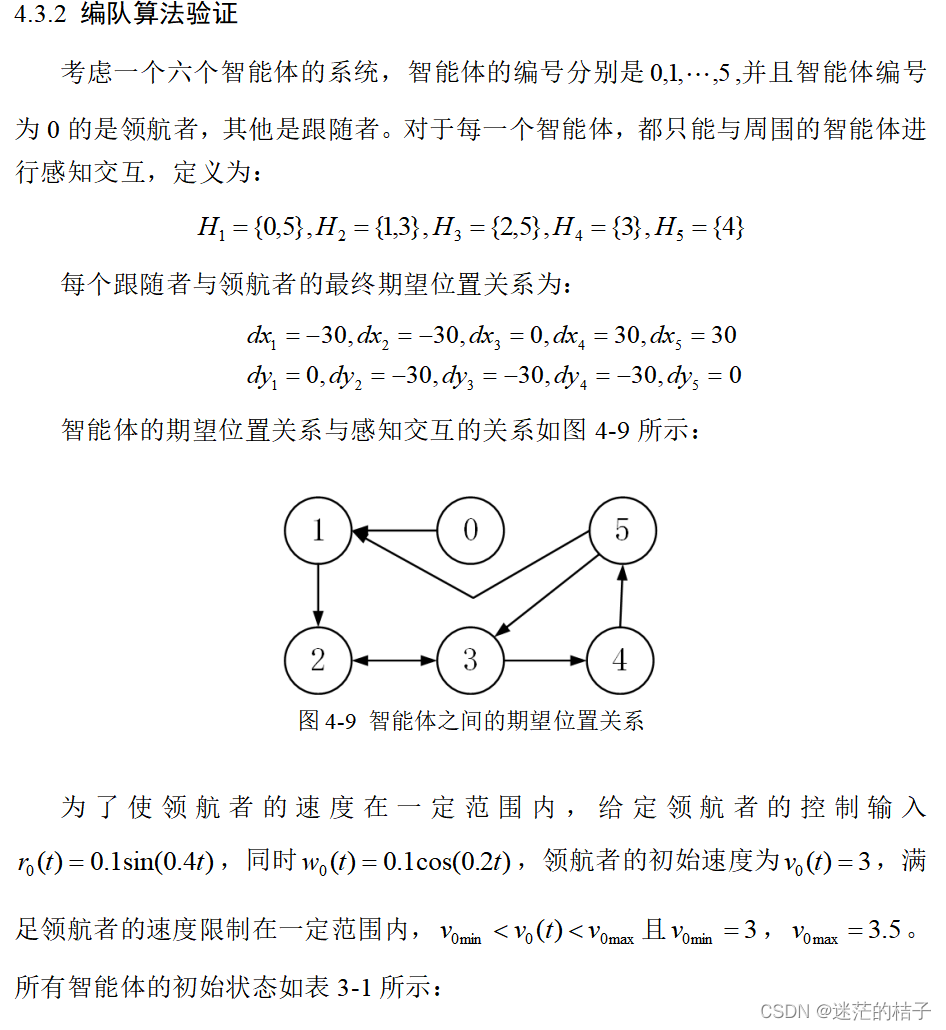

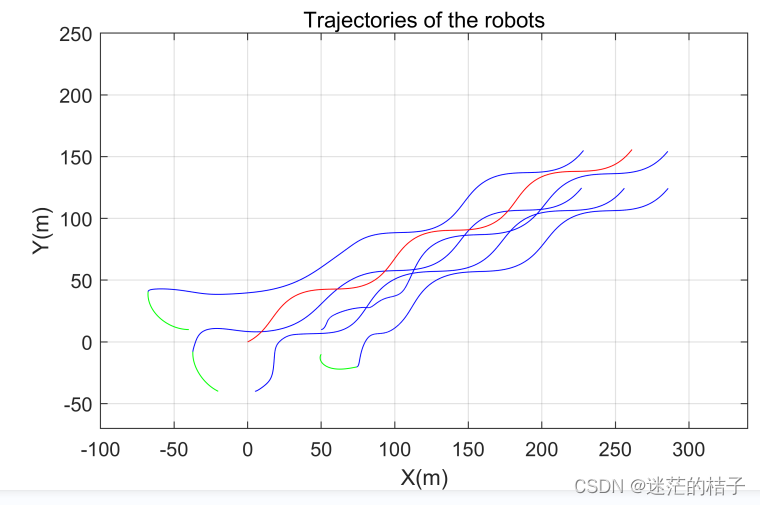
经过matlab仿真实现,红色是领导者,其他是跟随者,其他智能体能够很好地跟随领导者。
总结
此算法为一致性理论的编队控制,控制模型为非线性系统,适用于二阶系统。对于比较简单的线性系统的编队控制,一般采取基于位置的控制,详细内容参考博客:
无人机编队算法(Target-point formation control)
完整复现代码
一致性理论的编队控制matlab仿真-其它文档类资源-CSDN文库
注意:如果出现乱码,是因为matlab高版本兼容低版本,本人用的是matlab2020,建议您使用2020及更高的版本,如果是低版本,可以先用记事本打开,再复制到matlab
######################################################################
2022.09.28对画图进行了修改,之前的效果图比较简陋
如果想换成这种图片:
可以下载此文件,复制到原来的文件夹下,把之前的文件覆盖了
链接:https://pan.baidu.com/s/1XvyFTMmc8eUPC3xmcS7Qgw
提取码:nwpu
运行时要注意把code2中的路径“D:\file\桌面\一致性理论的编队\代码\test.gif”改成自己在的文件夹,或者改成局部路径“\test.gif”,或者直接删掉也可以。

