
热门标签
热门文章
- 1【Vue3】Vue3中路由规则的 props 配置_vue路由props
- 2domestic gpu
- 3数据结构(图,树)
- 4imgcook设计稿生成代码插件
- 5vue3后台管理系统实现动态侧边导航菜单管理(ElementPlus组件)_vue3后台菜单
- 6头歌educoder:Python入门之基础语法 第3关:注释_头歌python注释的答案
- 7GAN对抗生成网络学习笔记(三)DCGAN原理
- 8新一代开源语音库CoQui TTS冲到了GitHub 20.5k Star_coqui-ai tts微调
- 9LightGBM模型
- 10递推和递归的方法解决猴子吃桃问题(10天延伸到N天)——Java_猴子吃桃递推法
当前位置: article > 正文
【MPU6050移植】GD32F470移植正点原子陀螺仪源码_正点原子移植的dmp库
作者:小小林熬夜学编程 | 2024-04-20 02:31:40
赞
踩
正点原子移植的dmp库
本节此介绍GD32F470梁山派移植正点原子的mpu6050例程,本次只针对程序进行移植处理不对程序进行讲解,主要是更改引脚,以及DMP库的移植
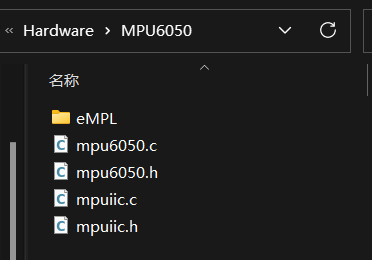
- 将正点原子的MPU6050文件夹粘贴进Hardware文件,mpuiic文件是软件模拟iic程序,mpu6050.c为模块相关初始化函数,eMPL是DMP相关的库函数。
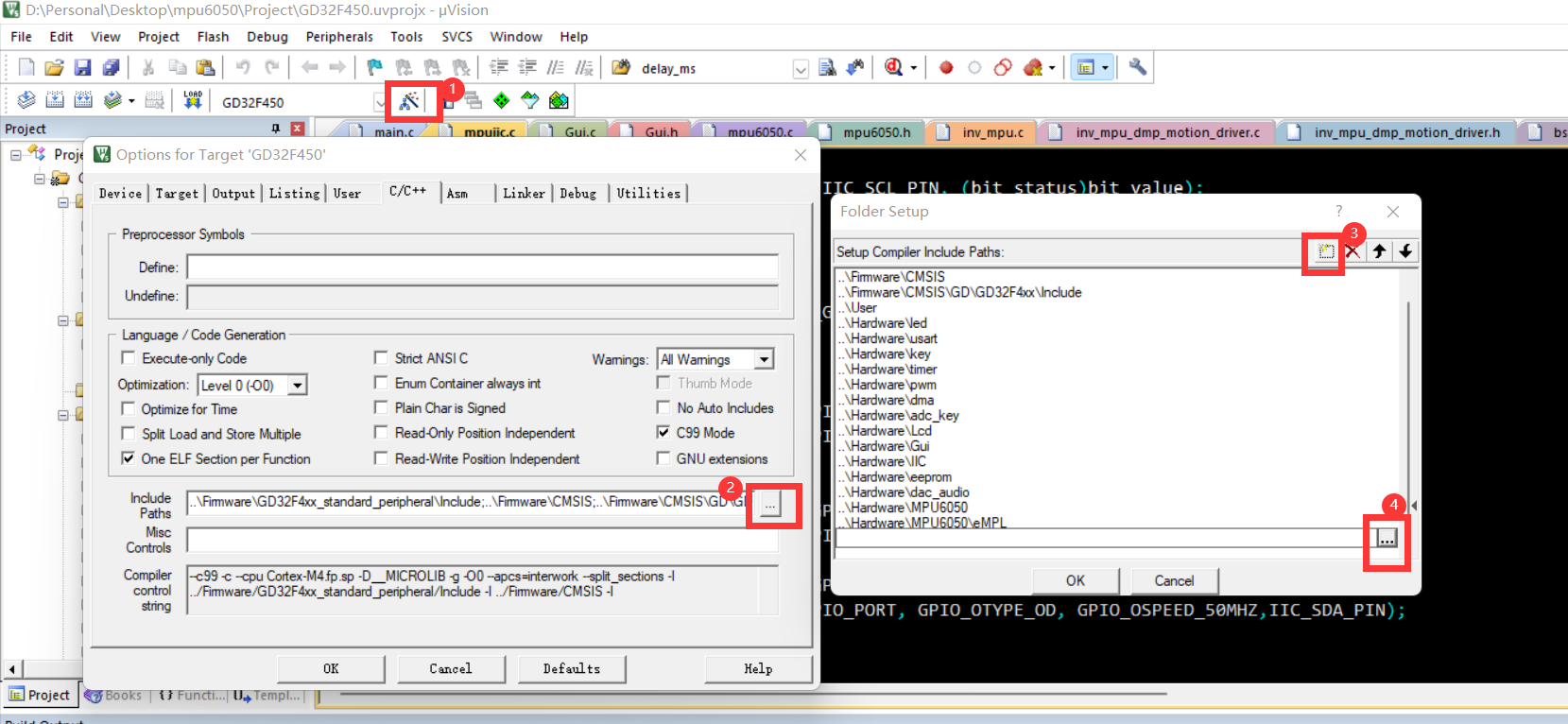
2.添加头文件路径,按照下图所示 1 2 3 4 顺序依次点击,
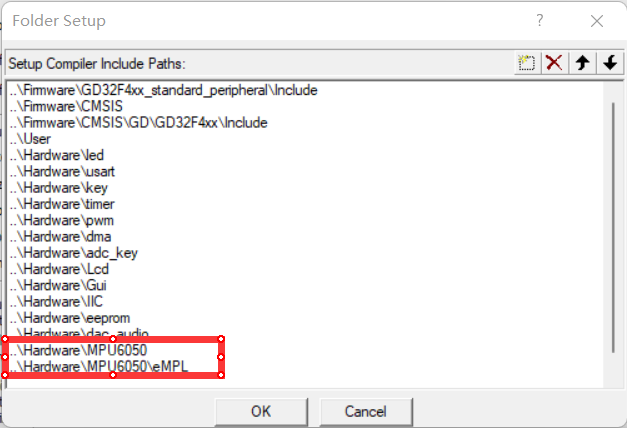
选择MPU6050文件夹以及eMPL文件夹,添加好后如下图所示
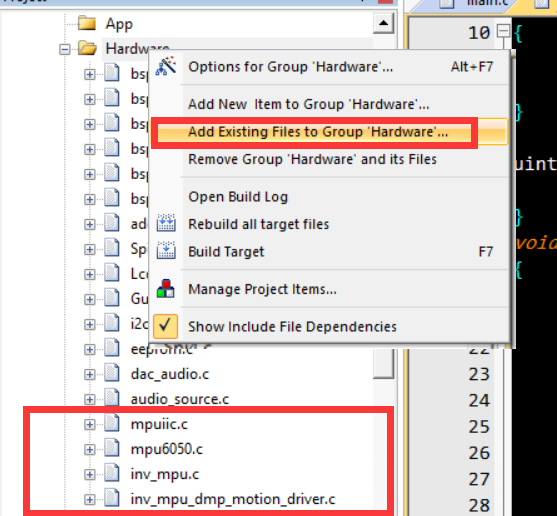
把用到的.c相关文件添加到工程里。
-
模拟iic驱动程序,引脚模式设置为开漏模式 外加上拉电阻,pb10->scl pb11->sda
#include "mpuiic.h" void my_i2c_w_SDA(uint8_t bit_value) { gpio_bit_write(IIC_SDA_GPIO_PORT, IIC_SDA_PIN, (bit_status)bit_value); delay_1us(10); } void my_i2c_w_SCL(uint8_t bit_value) { gpio_bit_write(IIC_SCL_GPIO_PORT, IIC_SCL_PIN, (bit_status)bit_value); delay_1us(10); } uint8_t my_i2c_r_SDA(void){ return gpio_input_bit_get(IIC_SDA_GPIO_PORT, IIC_SDA_PIN); } void MPU_IIC_Init() { rcu_periph_clock_enable(IIC_SCL_GPIO_CLK); rcu_periph_clock_enable(IIC_SDA_GPIO_CLK); /* configure led GPIO port */ gpio_mode_set(IIC_SCL_GPIO_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP,IIC_SCL_PIN); gpio_output_options_set(IIC_SCL_GPIO_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,IIC_SCL_PIN); gpio_mode_set(IIC_SDA_GPIO_PORT, GPIO_MODE_OUTPUT, GPIO_PUPD_PULLUP,IIC_SDA_PIN); gpio_output_options_set(IIC_SDA_GPIO_PORT, GPIO_OTYPE_OD, GPIO_OSPEED_50MHZ,IIC_SDA_PIN); } //i2c的起始 void MPU_IIC_Start(void){ //SDA高,SCL高,SDA低,SCL低; my_i2c_w_SDA(1); my_i2c_w_SCL(1); my_i2c_w_SDA(0); my_i2c_w_SCL(0); } //i2c的结束 void MPU_IIC_Stop(void){ my_i2c_w_SDA(0); my_i2c_w_SCL(1); my_i2c_w_SDA(1); } //SDA发送一个byte void MPU_IIC_Send_Byte(uint8_t byte_to_send){ uint8_t i; for(i = 0; i < 8; i++){ my_i2c_w_SDA(byte_to_send & (0x80>>i)); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } } //SDA读一个byte uint8_t MPU_IIC_Read_Byte(unsigned char ack){ uint8_t i; uint8_t result = 0x00; my_i2c_w_SDA(1); for(i = 0; i < 8; i++){ my_i2c_w_SCL(1); if(my_i2c_r_SDA()) result = result | (0x80>>i);//读SDA的bit值 my_i2c_w_SCL(0); } if (!ack) MPU_IIC_NAck();//发送nACK else MPU_IIC_Ack(); //发送ACK return result; } //主机应答 void MPU_IIC_Ack(void){ my_i2c_w_SCL(0); my_i2c_w_SDA(0); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } //主机非应答 void MPU_IIC_NAck(void){ my_i2c_w_SCL(0); my_i2c_w_SDA(1); my_i2c_w_SCL(1); my_i2c_w_SCL(0); } //主机接收应答 //返回值:1,接收应答失败 // 0,接收应答成功 uint8_t MPU_IIC_Wait_Ack(void){ uint8_t ack_result; my_i2c_w_SDA(1); my_i2c_w_SCL(1); ack_result = my_i2c_r_SDA(); my_i2c_w_SCL(0); return ack_result; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
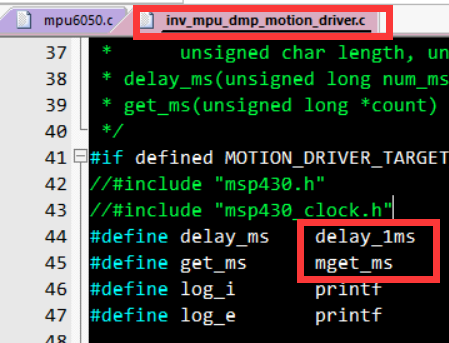
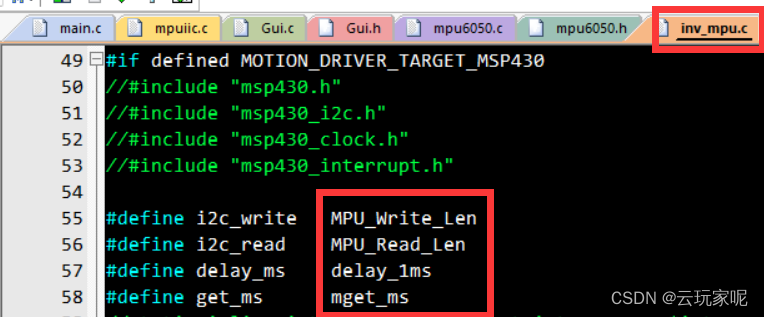
- DMP库的移植,主要更改下面两个文件这几个函数的宏定义,我这里已经改好。
5.移植好后调用下图所示相关函数就可以输出欧拉角了
if(mpu_dmp_get_data(&pitch,&roll,&yaw) == 0) { if(pitch<0){ LCD_ShowChar(85,144,'-',COLOR_BLUE,COLOR_WHITE,24,0); pitch = -pitch; }else LCD_ShowChar(85,144,' ',COLOR_BLUE,COLOR_WHITE,24,0); LCD_ShowIntNum(95,144,pitch,5,COLOR_BLUE,COLOR_WHITE,24); if(roll<0){ LCD_ShowChar(85,168,'-',COLOR_BLUE,COLOR_WHITE,24,0); roll = -roll; }else LCD_ShowChar(85,168,' ',COLOR_BLUE,COLOR_WHITE,24,0); LCD_ShowIntNum(95,168,roll,5,COLOR_BLUE,COLOR_WHITE,24); if(yaw<0){ LCD_ShowChar(85,192,'-',COLOR_BLUE,COLOR_WHITE,24,0); yaw = -yaw; }else LCD_ShowChar(85,192,' ',COLOR_BLUE,COLOR_WHITE,24,0); LCD_ShowIntNum(95,192,yaw,5,COLOR_BLUE,COLOR_WHITE,24); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
完整代码工程放在这里了,需要自取
https://gitee.com/yin-jiyuan123/module-migration.git
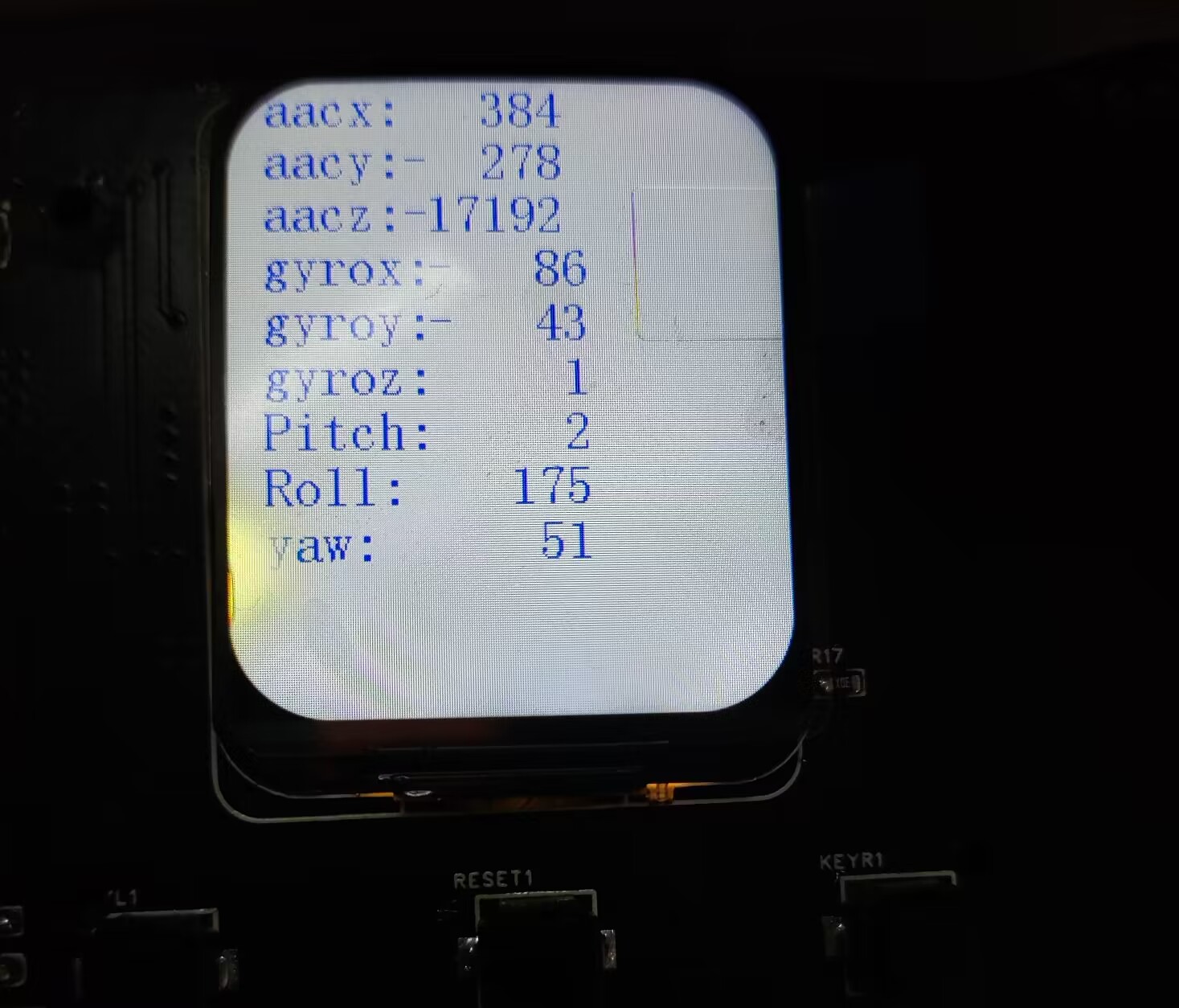
效果如下
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/454896
推荐阅读
相关标签

