
- 1iOS14升级后企业级安装失败_ios14企业级描述文件失败
- 22024年成功入职字节,25K小哥甩出的超详细面试总结,我就不信你还参透不了重点(1)_2024字节社招面试算法题
- 3双向链表中插入元素的几种方式_双向链表插入
- 4软件项目-1.5_逐层剖析系统开发的三层架构(经典)_软件项目1.5 三层
- 5如何训练一个大语言模型(LLMs)
- 6【GNSS】常见的GNSS免费软件和开源软件(持续更新)_gnss 形变监测开源软件
- 7STM32之HAL开发——FSMC(灵活静态存储控制器)
- 8Docker overview_docker start --checkpoint looper2 looper2
- 9生产环境部署NodeJs最佳实践
- 10onlyoffice7.5.1基础环境搭建+部署+demo可直接运行 最简单的入门_only office独立部署
stm32 MPU6050 6轴姿态传感器的介绍与DMP的应用_mpu6050的dmp怎么用
赞
踩
最近应用到三轴姿态传感器,因为之前有MPU6050(6轴传感器,这是6轴的), 进行搭配使用,通过三轴姿态传感器进行舵机的角度调整。(内容来源学习正点原子的教程)
同步B站也已经发布过原子官方教程。让大家可以更快的认识mpu6050.
MPU6050 是什么?
MPU6050 是 InvenSense 公司推出的全球首款整合性 6 轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了安装空间。
MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口(本模块未引出),可用于连接外部磁力传感器(构成9轴传感器),并利用自带的数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主 IIC 接口,向应用端输出完整的 9 轴融合演算数据。(产品如下图所示)
常见的6轴姿态传感器如下图所示(左边8pin的 ,右边6pin 的)

DMP方便我们处理姿态解算
有了 DMP,我们可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。
MPU6050 的特点包括:
① 以数字形式输出 6 轴或 9 轴(需外接磁传感器)的旋转矩阵、四元数(quaternion)、
欧拉角格式(Euler Angle forma)的融合演算数据(需 DMP 支持)
② 具有 131 LSBs/°/sec 敏感度与全格感测范围为±250、±500、±1000 与±2000°
/sec 的 3 轴角速度感测器(陀螺仪) ③ 集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器
④ 移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移
⑤ 自带数字运动处理(DMP: Digital Motion Processing)引擎可减少 MCU 复杂的融合演
算数据、感测器同步化、姿势感应等的负荷
⑥ 内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求
⑦ 自带一个数字温度传感器
⑧ 带数字输入同步引脚(Sync pin)支持视频电子影相稳定技术与 GPS
⑨ 可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速
下降中断、high-G 中断、零动作感应、触击感应、摇动感应功能
⑩ VDD 供电电压为 2.5V±5%、3.0V±5%、3.3V±5%;VLOGIC 可低至 1.8V± 5%高性能三轴加速度+三轴陀螺仪模块
MPU6050 六轴传感器模块用户手册
⑪ 陀螺仪工作电流:5mA,陀螺仪待机电流:5uA;加速器工作电流:500uA,加速器省电模式电流:40uA@10Hz
⑫ 自带 1024 字节 FIFO,有助于降低系统功耗
⑬ 高达 400Khz 的 IIC 通信接口
⑭ 超小封装尺寸:4x4x0.9mm(QFN)
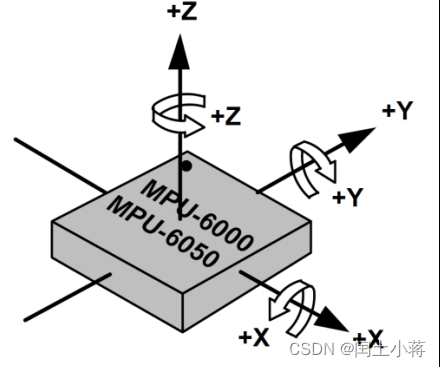
MPU6050 传感器的检测轴如下图 所示:(具体可以参考官方的“MPU-6000 & MPU-6050产品说明书(中文版)”)
MPU6050 的内部框图如下图 所示
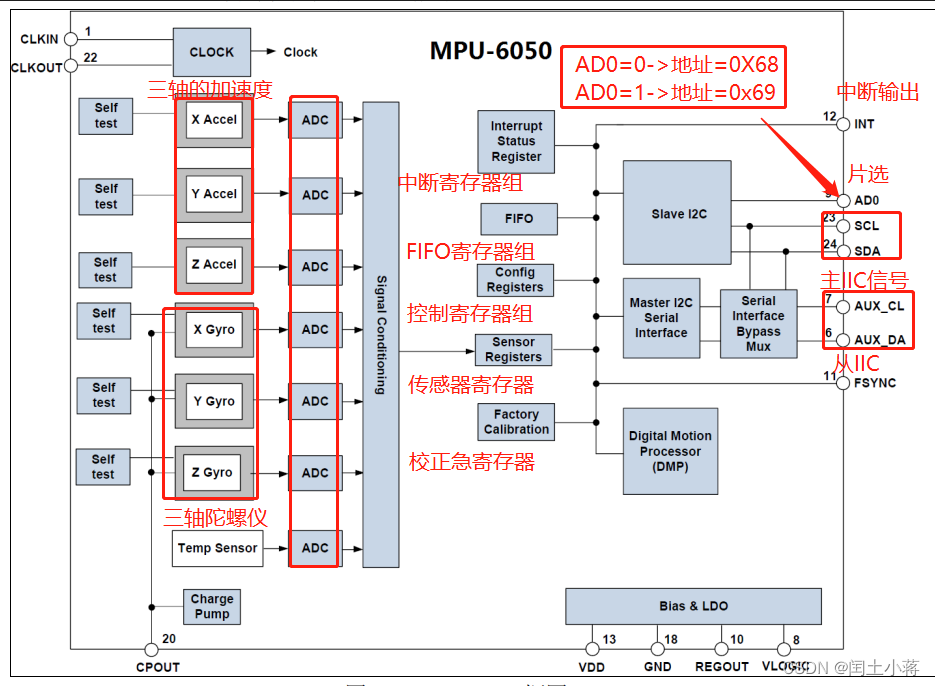
其中,SCL 和 SDA 是连接 MCU 的 IIC 接口,MCU 通过这个 IIC 接口来控制 MPU6050,另外还有一个 IIC 接口:AUX_CL 和 AUX_DA,这个接口可用来连接外部从设备,比如磁传感器,这样就可以组成一个九轴传感器。VLOGIC 是 IO 口电压,该引脚最低可以到 1.8V,
我们一般直接接 VDD 即可。AD0 是从 IIC 接口(接 MCU)的地址控制引脚,该引脚控制IIC 地址的最低位。如果接 GND,则 MPU6050 的 IIC 地址是:0X68,如果接 VDD,则是0X69,注意:这里的地址是不包含数据传输的最低位的(最低位用来表示读写)!!
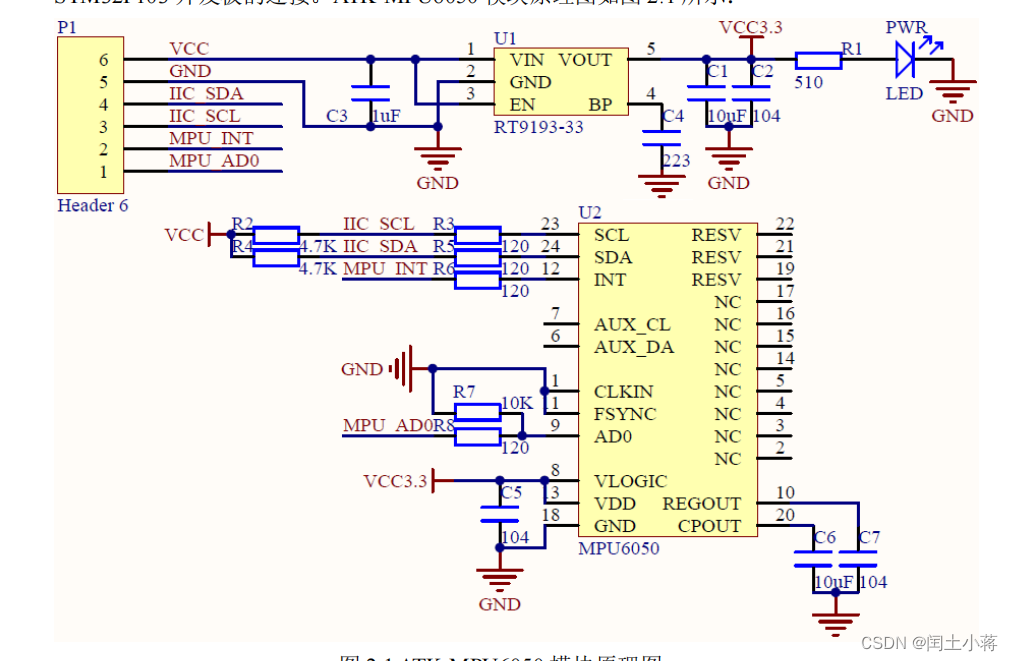
mpu6050模块原理图如下(正点原子的该产品)
第一步MPU6050 初始化(同24c02)
STM32F1 读取 MPU6050 的加速度和角度传感器数据(非中断方式),需要哪些初始化步骤
1)初始化 IIC 接口MPU6050 采用 IIC 与 STM32F1 通信,所以我们需要先初始化与 MPU6050 连接的 SDA和 SCL 数据线。
2)复位 MPU6050这一步让 MPU6050 内部所有寄存器恢复默认值,通过对电源管理寄存器 1(0X6B)的bit7 写 1 实现。 复位后,电源管理寄存器 1 恢复默认值(0X40),然后必须设置该寄存器为0X00,以唤醒 MPU6050,进入正常工作状态。
3)设置角速度传感器(陀螺仪)和加速度传感器的满量程范围这一步,我们设置两个传感器的满量程范围(FSR),分别通过陀螺仪配置寄存器(0X1B)和加速度传感器配置寄存器(0X1C)设置。我们一般设置陀螺仪的满量程范围为±2000dps,加速度传感器的满量程范围为±2g。
4)设置其他参数这里,我们还需要配置的参数有:(关闭中断、关闭 AUX IIC 接口、禁止 FIFO、设置陀螺仪采样率和设置数字低通滤波器(DLPF)等。本章我们不用中断方式读取数据,所以关闭中断,然后也没用到 AUX IIC 接口外接其他传感器,所以也关闭这个接口。分别通过中断使能寄存器(0X38)和用户控制寄存器(0X6A)控制。MPU6050 可以使用 FIFO 存储传感器数据,不过本章我们没有用到,所以关闭所有 FIFO 通道,这个通过 FIFO 使能寄存器(0X23)控制,默认都是 0(即禁止 FIFO),所以用默认值就可以了。)本次只是使用陀螺仪采样率通过采样率分频寄存器(0X19)控制,这个采样率我们一般设置为 50 即可。数字低通滤波器(DLPF)则通过配置寄存器(0X1A)设置,一般设置 DLPF 为带宽的 1/2 即可。
5)配置系统时钟源并使能角速度传感器和加速度传感器系统时钟源同样是通过电源管理寄存器 1(0X1B)来设置,该寄存器的最低三位用于设置系统时钟源选择,默认值是 0(内部 8M RC 震荡),不过我们一般设置为 1,选择 x 轴陀螺 PLL 作为时钟源,以获得更高精度的时钟。同时,使能角速度传感器和加速度传感器,这两个操作通过电源管理寄存器 2(0X6C)来设置,设置对应位为 0 即可开启。至此MPU6050 的初始化就完成了,可以正常工作了(其他未设置的寄存器全部采用默认值即可),接下来,我们就可以读取相关寄存器,得到加速度传感器、角速度传感器和温度传感器的数据了。
第二步读取数据(以上就是初始化,下面就可以读取陀螺仪的,加速度传感器和温度传感器的数据)
1、了解几个寄存器的使用
电源管理寄存器配置(0X6B)
陀螺仪配置寄存器,该寄存器地址为:0X1B,
加速度传感器配置寄存器,寄存器地址为:0X1C
FIFO 使能寄存器,寄存器地址为:0X1C,
陀螺仪采样率分频寄存器,寄存器地址为:0X19
该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)这里陀螺仪的输出频率,是 1Khz 或者 8Khz,与数字低通滤波器(DLPF)的设置有关,当 DLPF_CFG=0/7 的时候,频率为 8Khz,其他情况是 1Khz。而且 DLPF 滤波频率一般设置为采样率的一半。采样率,我们假定设置为 50Hz,那么 SMPLRT_DIV=1000/50-1=19。
配置寄存器,寄存器地址为:0X1A,
看电源管理寄存器 2,寄存器地址为:0X6C,
2、DMP 使用简介(使用意义通过获取原始数据通过DMP自带计算出欧拉角,这里大家知道如何使用就行,想深入了解DMP可参考官方文档 和说明)
我们可以读出 MPU6050 的加速度传感器和角速度传感器的原始数据。不过这些原始数据,对想搞四轴之类的初学者来说,用处不大,我们期望得到的是姿态数据,也就是欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。有了这三个角,
我们就可以得到当前四轴的姿态,这才是我们想要的结果。
DMP 优势
InvenSense 提供了一个 MPU6050 的嵌入式运动驱动库,结合 MPU6050 的 DMP,可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到 yaw、roll 和 pitch(要得到欧拉角数据,就得利用我们的原始数据,进行姿态融合解算,这个比较复杂,知识点比较多,初学者 不易掌握。而 MPU6050 自带了数字运动处理器,即 DMP)。
使用内置的 DMP,大大简化了四轴的代码设计,且 MCU 不用进行姿态解算过程,大大降低了 MCU 的负担,从而有更多的时间去处理其他事件,提高系统实时性。使用 MPU6050 的 DMP 输出的四元数是 q30 格式的,也就是浮点数放大了 2 的 30 次方倍。在换算成欧拉角之前,必须先将其转换为浮点数,也就是除以 2 的 30 次方,然后再进计算。
计算公式为:
q0=quat[0] / q30; //q30 格式转换为浮点数
q1=quat[1] / q30;
q2=quat[2] / q30;
q3=quat[3] / q30;
//计算得到俯仰角/横滚角/航向角
pitch=asin(-2 * q1 * q3 + 2 * q0* q2)* 57.3; //俯仰角
roll=atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; //横滚角
yaw=atan2(2*(q1q2 + q0q3),q0q0+q1q1-q2q2-q3q3) * 57.3; //航向角
其中 quat[0]~ quat[3]是 MPU6050 的 DMP 解算后的四元数,q30 格式,所以要除以一个2 的 30 次方,其中 q30 是一个常量:1073741824,即 2 的 30 次方,然后带入公式,计算出欧拉角。上述计算公式的 57.3 是弧度转换为角度,即 180/π,这样得到的结果就是以度(°)为单位的。
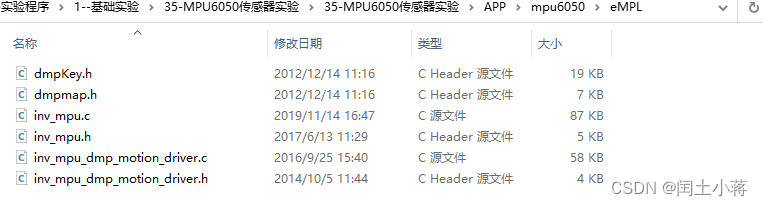
该驱动库的使用
该驱动库,重点就是两个 c 文件:inv_mpu.c 和 inv_mpu_dmp_motion_driver.c。其中我们在 inv_mpu.c 添加了几个函数,方便我们使用,重点是两个函数:mpu_dmp_init 和mpu_dmp_get_data 这两个函数,这里我们简单介绍下这两个函数。
下载直接引入该库到项目文件如下图所示
下面开始正式 写我们的程序,上述解释了半天只是想让大家知道,MPU6050的相关只是,认识MPU6050原理以及应用在实际项目中
mpu6050
//初始化MPU6050 //返回值:0,成功 // 其他,错误代码 u8 MPU6050_Init(void) { u8 res; IIC_Init();//初始化IIC总线 MPU6050_Write_Byte(MPU6050_PWR_MGMT1_REG,0X80); //复位MPU6050 delay_ms(100); MPU6050_Write_Byte(MPU6050_PWR_MGMT1_REG,0X00); //唤醒MPU6050 MPU6050_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU6050_Set_Accel_Fsr(0); //加速度传感器,±2g MPU6050_Set_Rate(50); //设置采样率50Hz MPU6050_Write_Byte(MPU6050_INT_EN_REG,0X00); //关闭所有中断 MPU6050_Write_Byte(MPU6050_USER_CTRL_REG,0X00); //I2C主模式关闭 MPU6050_Write_Byte(MPU6050_FIFO_EN_REG,0X00); //关闭FIFO MPU6050_Write_Byte(MPU6050_INTBP_CFG_REG,0X80); //INT引脚低电平有效 res=MPU6050_Read_Byte(MPU6050_DEVICE_ID_REG); if(res==MPU6050_ADDR)//器件ID正确 { MPU6050_Write_Byte(MPU6050_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考 MPU6050_Write_Byte(MPU6050_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作 MPU6050_Set_Rate(50); //设置采样率为50Hz }else return 1; return 0; } //设置MPU6050陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 u8 MPU6050_Set_Gyro_Fsr(u8 fsr) { return MPU6050_Write_Byte(MPU6050_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围 } //设置MPU6050加速度传感器满量程范围 //fsr:0,±2g;1,±4g;2,±8g;3,±16g //返回值:0,设置成功 // 其他,设置失败 u8 MPU6050_Set_Accel_Fsr(u8 fsr) { return MPU6050_Write_Byte(MPU6050_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围 } //设置MPU6050的数字低通滤波器 //lpf:数字低通滤波频率(Hz) //返回值:0,设置成功 // 其他,设置失败 u8 MPU6050_Set_LPF(u16 lpf) { u8 data=0; if(lpf>=188)data=1; else if(lpf>=98)data=2; else if(lpf>=42)data=3; else if(lpf>=20)data=4; else if(lpf>=10)data=5; else data=6; return MPU6050_Write_Byte(MPU6050_CFG_REG,data);//设置数字低通滤波器 } //设置MPU6050的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 u8 MPU6050_Set_Rate(u16 rate) { u8 data; if(rate>1000)rate=1000; if(rate<4)rate=4; data=1000/rate-1; data=MPU6050_Write_Byte(MPU6050_SAMPLE_RATE_REG,data); //设置数字低通滤波器 return MPU6050_Set_LPF(rate/2); //自动设置LPF为采样率的一半 } //得到温度值 //返回值:温度值(扩大了100倍) short MPU6050_Get_Temperature(void) { u8 buf[2]; short raw; float temp; MPU6050_Read_Len(MPU6050_ADDR,MPU6050_TEMP_OUTH_REG,2,buf); raw=((u16)buf[0]<<8)|buf[1]; temp=36.53+((double)raw)/340; return temp*100;; } //得到陀螺仪值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 u8 MPU6050_Get_Gyroscope(short *gx,short *gy,short *gz) { u8 buf[6],res; res=MPU6050_Read_Len(MPU6050_ADDR,MPU6050_GYRO_XOUTH_REG,6,buf); if(res==0) { *gx=((u16)buf[0]<<8)|buf[1]; *gy=((u16)buf[2]<<8)|buf[3]; *gz=((u16)buf[4]<<8)|buf[5]; } return res;; } //得到加速度值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 u8 MPU6050_Get_Accelerometer(short *ax,short *ay,short *az) { u8 buf[6],res; res=MPU6050_Read_Len(MPU6050_ADDR,MPU6050_ACCEL_XOUTH_REG,6,buf); if(res==0) { *ax=((u16)buf[0]<<8)|buf[1]; *ay=((u16)buf[2]<<8)|buf[3]; *az=((u16)buf[4]<<8)|buf[5]; } return res;; } //IIC连续写 //addr:器件地址 //reg:寄存器地址 //len:写入长度 //buf:数据区 //返回值:0,正常 // 其他,错误代码 u8 MPU6050_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf) { u8 i; IIC_Start(); IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令 if(IIC_Wait_Ack()) //等待应答 { IIC_Stop(); return 1; } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 for(i=0;i<len;i++) { IIC_Send_Byte(buf[i]); //发送数据 if(IIC_Wait_Ack()) //等待ACK { IIC_Stop(); return 1; } } IIC_Stop(); return 0; } //IIC连续读 //addr:器件地址 //reg:要读取的寄存器地址 //len:要读取的长度 //buf:读取到的数据存储区 //返回值:0,正常 // 其他,错误代码 u8 MPU6050_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf) { IIC_Start(); IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令 if(IIC_Wait_Ack()) //等待应答 { IIC_Stop(); return 1; } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Start(); IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令 IIC_Wait_Ack(); //等待应答 while(len) { if(len==1)*buf=IIC_Read_Byte(0);//读数据,发送nACK else *buf=IIC_Read_Byte(1); //读数据,发送ACK len--; buf++; } IIC_Stop(); //产生一个停止条件 return 0; } //IIC写一个字节 //reg:寄存器地址 //data:数据 //返回值:0,正常 // 其他,错误代码 u8 MPU6050_Write_Byte(u8 reg,u8 data) { IIC_Start(); IIC_Send_Byte((MPU6050_ADDR<<1)|0);//发送器件地址+写命令 if(IIC_Wait_Ack()) //等待应答 { IIC_Stop(); return 1; } IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Send_Byte(data);//发送数据 if(IIC_Wait_Ack()) //等待ACK { IIC_Stop(); return 1; } IIC_Stop(); return 0; } //IIC读一个字节 //reg:寄存器地址 //返回值:读到的数据 u8 MPU6050_Read_Byte(u8 reg) { u8 res; IIC_Start(); IIC_Send_Byte((MPU6050_ADDR<<1)|0);//发送器件地址+写命令 IIC_Wait_Ack(); //等待应答 IIC_Send_Byte(reg); //写寄存器地址 IIC_Wait_Ack(); //等待应答 IIC_Start(); IIC_Send_Byte((MPU6050_ADDR<<1)|1);//发送器件地址+读命令 IIC_Wait_Ack(); //等待应答 res=IIC_Read_Byte(0);//读取数据,发送nACK IIC_Stop(); //产生一个停止条件 return res; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
H文件
//#define MPU6050_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到 //#define MPU6050_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到 #define MPU6050_SELF_TESTX_REG 0X0D //自检寄存器X #define MPU6050_SELF_TESTY_REG 0X0E //自检寄存器Y #define MPU6050_SELF_TESTZ_REG 0X0F //自检寄存器Z #define MPU6050_SELF_TESTA_REG 0X10 //自检寄存器A #define MPU6050_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU6050_CFG_REG 0X1A //配置寄存器 #define MPU6050_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU6050_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU6050_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器 #define MPU6050_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU6050_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器 #define MPU6050_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器 #define MPU6050_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器 #define MPU6050_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器 #define MPU6050_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器 #define MPU6050_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器 #define MPU6050_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器 #define MPU6050_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器 #define MPU6050_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器 #define MPU6050_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器 #define MPU6050_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器 #define MPU6050_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器 #define MPU6050_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器 #define MPU6050_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器 #define MPU6050_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器 #define MPU6050_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器 #define MPU6050_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器 #define MPU6050_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器 #define MPU6050_I2CMST_STA_REG 0X36 //IIC主机状态寄存器 #define MPU6050_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU6050_INT_EN_REG 0X38 //中断使能寄存器 #define MPU6050_INT_STA_REG 0X3A //中断状态寄存器 #define MPU6050_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU6050_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU6050_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU6050_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU6050_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU6050_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU6050_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU6050_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU6050_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU6050_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU6050_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU6050_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU6050_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU6050_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 #define MPU6050_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器 #define MPU6050_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器 #define MPU6050_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器 #define MPU6050_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器 #define MPU6050_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器 #define MPU6050_SIGPATH_RST_REG 0X68 //信号通道复位寄存器 #define MPU6050_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器 #define MPU6050_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU6050_PWR_MGMT1_REG 0X6B //电源管理寄存器1 #define MPU6050_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU6050_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位 #define MPU6050_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位 #define MPU6050_FIFO_RW_REG 0X74 //FIFO读写寄存器 #define MPU6050_DEVICE_ID_REG 0X75 //器件ID寄存器 //如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位). //如果接V3.3,则IIC地址为0X69(不包含最低位). #define MPU6050_ADDR 0X68 因为开发板接GND,所以转为读写地址后,为0XD1和0XD0(如果接V3.3,则为0XD3和0XD2) //#define MPU6050_READ 0XD1 //#define MPU6050_WRITE 0XD0 u8 MPU6050_Init(void); //初始化MPU6050 u8 MPU6050_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写 u8 MPU6050_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读 u8 MPU6050_Write_Byte(u8 reg,u8 data); //IIC写一个字节 u8 MPU6050_Read_Byte(u8 reg); //IIC读一个字节 u8 MPU6050_Set_Gyro_Fsr(u8 fsr); u8 MPU6050_Set_Accel_Fsr(u8 fsr); u8 MPU6050_Set_LPF(u16 lpf); u8 MPU6050_Set_Rate(u16 rate); u8 MPU6050_Set_Fifo(u8 sens); short MPU6050_Get_Temperature(void); u8 MPU6050_Get_Gyroscope(short *gx,short *gy,short *gz); u8 MPU6050_Get_Accelerometer(short *ax,short *ay,short *az); #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
下面是主函数
#include "tftlcd.h" #include "mpu6050.h" #include "inv_mpu.h" //上面说的dmp 文件 #include "inv_mpu_dmp_motion_driver.h" ///dmp 文件 //串口1发送1个字符 //c:要发送的字符 void usart1_send_char(u8 c) { while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); USART_SendData(USART1,c); } //传送数据给匿名四轴上位机软件(V2.6版本) //fun:功能字. 0XA0~0XAF //data:数据缓存区,最多28字节!! //len:data区有效数据个数 void usart1_niming_report(u8 fun,u8*data,u8 len) { u8 send_buf[32]; u8 i; if(len>28)return; //最多28字节数据 send_buf[len+3]=0; //校验数置零 send_buf[0]=0X88; //帧头 send_buf[1]=fun; //功能字 send_buf[2]=len; //数据长度 for(i=0;i<len;i++)send_buf[3+i]=data[i]; //复制数据 for(i=0;i<len+3;i++)send_buf[len+3]+=send_buf[i]; //计算校验和 for(i=0;i<len+4;i++)usart1_send_char(send_buf[i]); //发送数据到串口1 } //发送加速度传感器数据和陀螺仪数据 //aacx,aacy,aacz:x,y,z三个方向上面的加速度值 //gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值 void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz) { u8 tbuf[12]; tbuf[0]=(aacx>>8)&0XFF; tbuf[1]=aacx&0XFF; tbuf[2]=(aacy>>8)&0XFF; tbuf[3]=aacy&0XFF; tbuf[4]=(aacz>>8)&0XFF; tbuf[5]=aacz&0XFF; tbuf[6]=(gyrox>>8)&0XFF; tbuf[7]=gyrox&0XFF; tbuf[8]=(gyroy>>8)&0XFF; tbuf[9]=gyroy&0XFF; tbuf[10]=(gyroz>>8)&0XFF; tbuf[11]=gyroz&0XFF; usart1_niming_report(0XA1,tbuf,12);//自定义帧,0XA1 } //通过串口1上报结算后的姿态数据给电脑 //aacx,aacy,aacz:x,y,z三个方向上面的加速度值 //gyrox,gyroy,gyroz:x,y,z三个方向上面的陀螺仪值 //roll:横滚角.单位0.01度。 -18000 -> 18000 对应 -180.00 -> 180.00度 //pitch:俯仰角.单位 0.01度。-9000 - 9000 对应 -90.00 -> 90.00 度 //yaw:航向角.单位为0.1度 0 -> 3600 对应 0 -> 360.0度 void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw) { u8 tbuf[28]; u8 i; for(i=0;i<28;i++)tbuf[i]=0;//清0 tbuf[0]=(aacx>>8)&0XFF; tbuf[1]=aacx&0XFF; tbuf[2]=(aacy>>8)&0XFF; tbuf[3]=aacy&0XFF; tbuf[4]=(aacz>>8)&0XFF; tbuf[5]=aacz&0XFF; tbuf[6]=(gyrox>>8)&0XFF; tbuf[7]=gyrox&0XFF; tbuf[8]=(gyroy>>8)&0XFF; tbuf[9]=gyroy&0XFF; tbuf[10]=(gyroz>>8)&0XFF; tbuf[11]=gyroz&0XFF; tbuf[18]=(roll>>8)&0XFF; tbuf[19]=roll&0XFF; tbuf[20]=(pitch>>8)&0XFF; tbuf[21]=pitch&0XFF; tbuf[22]=(yaw>>8)&0XFF; tbuf[23]=yaw&0XFF; usart1_niming_report(0XAF,tbuf,28);//飞控显示帧,0XAF } int main() { u8 i=0; u8 key; u8 report=1; float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; //加速度传感器原始数据 short gyrox,gyroy,gyroz; //陀螺仪原始数据 short temp; //温度 SysTick_Init(72); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组 LED_Init(); USART1_Init(256000); TFTLCD_Init(); //LCD初始化 KEY_Init(); MPU6050_Init(); //初始化MPU6050 FRONT_COLOR=BLACK; LCD_ShowString(10,10,tftlcd_data.width,tftlcd_data.height,16,"PRECHIN STM32F1"); LCD_ShowString(10,30,tftlcd_data.width,tftlcd_data.height,16,"www.prechin.net"); LCD_ShowString(10,50,tftlcd_data.width,tftlcd_data.height,16,"MPU6050 Test"); printf("mpu_dmp_init()=%d\r\n",mpu_dmp_init()); FRONT_COLOR=RED; while(mpu_dmp_init()) { printf("MPU6050 Error!\r\n"); LCD_ShowString(10,130,tftlcd_data.width,tftlcd_data.height,16,"MPU6050 Error!"); delay_ms(200); } printf("MPU6050 OK!\r\n"); LCD_ShowString(10,130,tftlcd_data.width,tftlcd_data.height,16,"MPU6050 OK! "); LCD_ShowString(10,150,tftlcd_data.width,tftlcd_data.height,16,"K_UP:UPLOAD ON/OFF"); FRONT_COLOR=BLUE;//设置字体为蓝色 LCD_ShowString(10,170,tftlcd_data.width,tftlcd_data.height,16,"UPLOAD ON "); LCD_ShowString(10,200,tftlcd_data.width,tftlcd_data.height,16," Temp: . C"); LCD_ShowString(10,220,tftlcd_data.width,tftlcd_data.height,16,"Pitch: . C"); LCD_ShowString(10,240,tftlcd_data.width,tftlcd_data.height,16," Roll: . C"); LCD_ShowString(10,260,tftlcd_data.width,tftlcd_data.height,16," Yaw : . C"); while(1) { key=KEY_Scan(0); if(key==KEY_UP_PRESS) { report=!report; if(report)LCD_ShowString(10,170,tftlcd_data.width,tftlcd_data.height,16,"UPLOAD ON "); else LCD_ShowString(10,170,tftlcd_data.width,tftlcd_data.height,16,"UPLOAD OFF"); } if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0) { temp=MPU6050_Get_Temperature(); //得到温度值 MPU6050_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据 MPU6050_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据 if(report)mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);//用自定义帧发送加速度和陀螺仪原始数据 if(report)usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10)); if((i%10)==0) { if(temp<0) { LCD_ShowChar(10+48,200,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(10+48,200,' ',16,0); //去掉负号 // printf("检测温度为:%d度\r\n",temp); LCD_ShowNum(10+48+8,200,temp/100,3,16); //显示整数部分 LCD_ShowNum(10+48+40,200,temp%10,1,16); //显示小数部分 temp=pitch*10; if(temp<0) { LCD_ShowChar(10+48,220,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(10+48,220,' ',16,0); //去掉负号 // printf("Pitch:%d\r\n",temp); LCD_ShowNum(10+48+8,220,temp/10,3,16); //显示整数部分 LCD_ShowNum(10+48+40,220,temp%10,1,16); //显示小数部分 temp=roll*10; if(temp<0) { LCD_ShowChar(10+48,240,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(10+48,240,' ',16,0); //去掉负号 // printf("Roll:%d\r\n",temp); LCD_ShowNum(10+48+8,240,temp/10,3,16); //显示整数部分 LCD_ShowNum(10+48+40,240,temp%10,1,16); //显示小数部分 temp=yaw*10; if(temp<0) { LCD_ShowChar(10+48,260,'-',16,0); //显示负号 temp=-temp; //转为正数 }else LCD_ShowChar(10+48,260,' ',16,0); //去掉负号 // printf("Yaw:%d\r\n",temp); LCD_ShowNum(10+48+8,260,temp/10,3,16); //显示整数部分 LCD_ShowNum(10+48+40,260,temp%10,1,16); //显示小数部分 LED1=!LED1; } } i++; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
//显示结果如下图获取的欧拉角数据
学习总结
陀螺仪采样频率=陀螺仪输出频率 / (1+SMPLRT_DIV)
学习使用DMP提供的库函数 获取实际需要的欧拉角(航向角(yaw)、横滚角(roll)和俯仰角(pitch))
https://www.bilibili.com/同步会更新相关视频(搜索闰土小蒋)
上一章节
学习 stm32 无线蓝牙模块HC05配置与应用(手机蓝牙连接发送参数)

