
热门标签
热门文章
- 1护网行动及注意事项_护网行动报名条件
- 2flutter-web中使用js工具类_fluter 使用 js
- 3在Genymotion虚拟机上安装Google Apps_genymotion 安装gms
- 42024年还有人不知道Web3吗?_web3 csdn
- 5大学四年..就混了毕业证的我,出社会深感无力..辞去工作,从头开始_大学学的计算机混了个毕业证
- 6搭建DVWA漏洞环境靶场_dvwa靶场搭建
- 7Ubuntu20.04安装MongoDB
- 8Flink进阶篇-CDC 原理、实践和优化&采集到Doris中_flinkcdc sink doris
- 9python怎么创建一个文件夹,用python创建一个文件夹_python创建文件夹
- 10Android开发——BroadcastReceiver知识总结_粘性广播废弃
当前位置: article > 正文
没有GPS模块无人机无法解锁解决方法测试及其他无法解锁APM疑难杂症_apm无法解锁
作者:小小林熬夜学编程 | 2024-04-26 03:31:11
赞
踩
apm无法解锁
目录
4.其他可能问题。
说明:本文仅限于常规故障排除法无效后可行的某种尝试,不代表以下操作为必要性操作。
提示:无人机无法解锁时,要结合整个通信链路,确立闭环思维,即从操作遥控器到接收机再到飞控、到地面站显示,或从操作遥控器到接收机再到飞控、到电机响应,按照顺序进行排除法检查故障。
前言:通常,APM飞控无人机组装后必须进行加速度计校准、遥控器校准、罗盘校准等,才能解锁。但是有的APM飞控没有内置罗盘,也没有安装外置罗盘,在此情况下,无法进行罗盘校准,显示error99,即便进行了电机校准,但是仍然执行解锁操作无法解锁。
首先是如何解锁,当完成遥控校准、加速度校准和罗盘校准后,可以尝试解锁。APM的解锁动作是以检测到第三通道最低值+第四通道最高值为标准的,即油门最低,方向最右(pwm值最大)即可执行APM的解锁动作。当APM收到解锁信号后,APM会先自检,红灯开始闪烁,自检通过,解锁成功,红灯常亮(地面站中红色DISARMED会变成ARMED),表示解锁成功。解锁时需要保持油门最低,方向最大的动作5秒以上。解锁以后,如果15秒内没有任何操作,会自动上锁。手动上锁关闭引擎方法:油门最低,方向最左(PWM最低)。
1.GPS没有安装时如何进行校准,进行解锁。
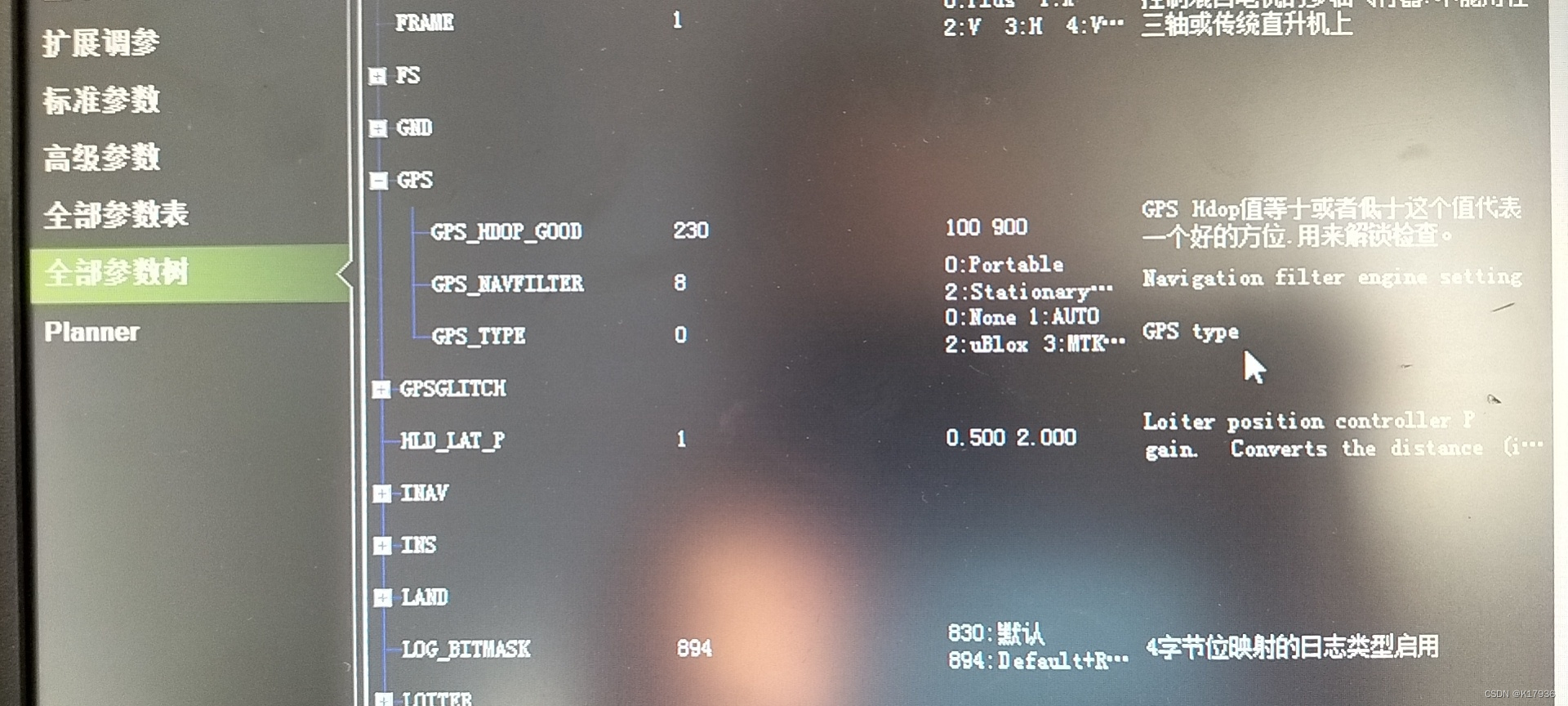
将GPS type设为零
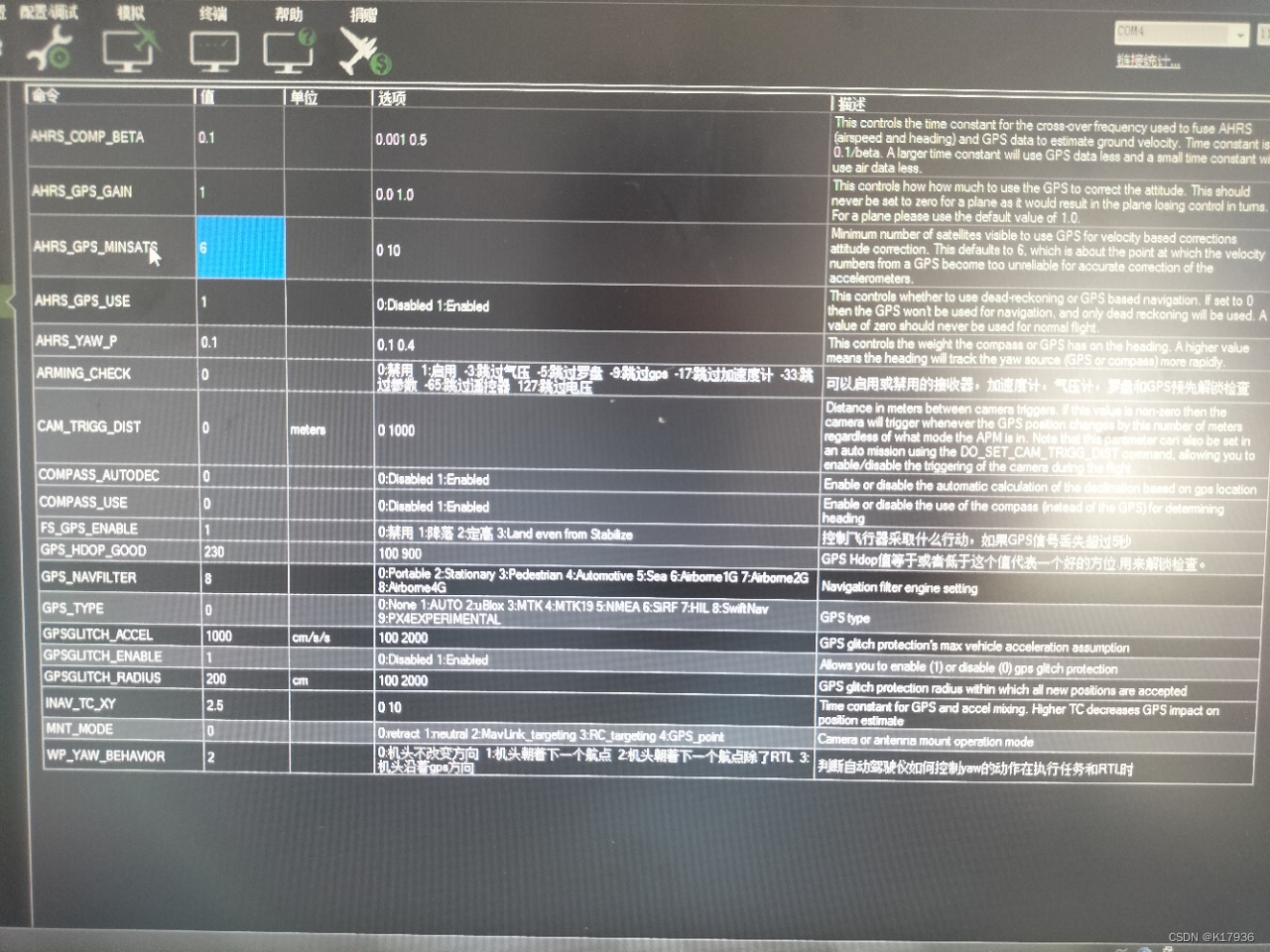
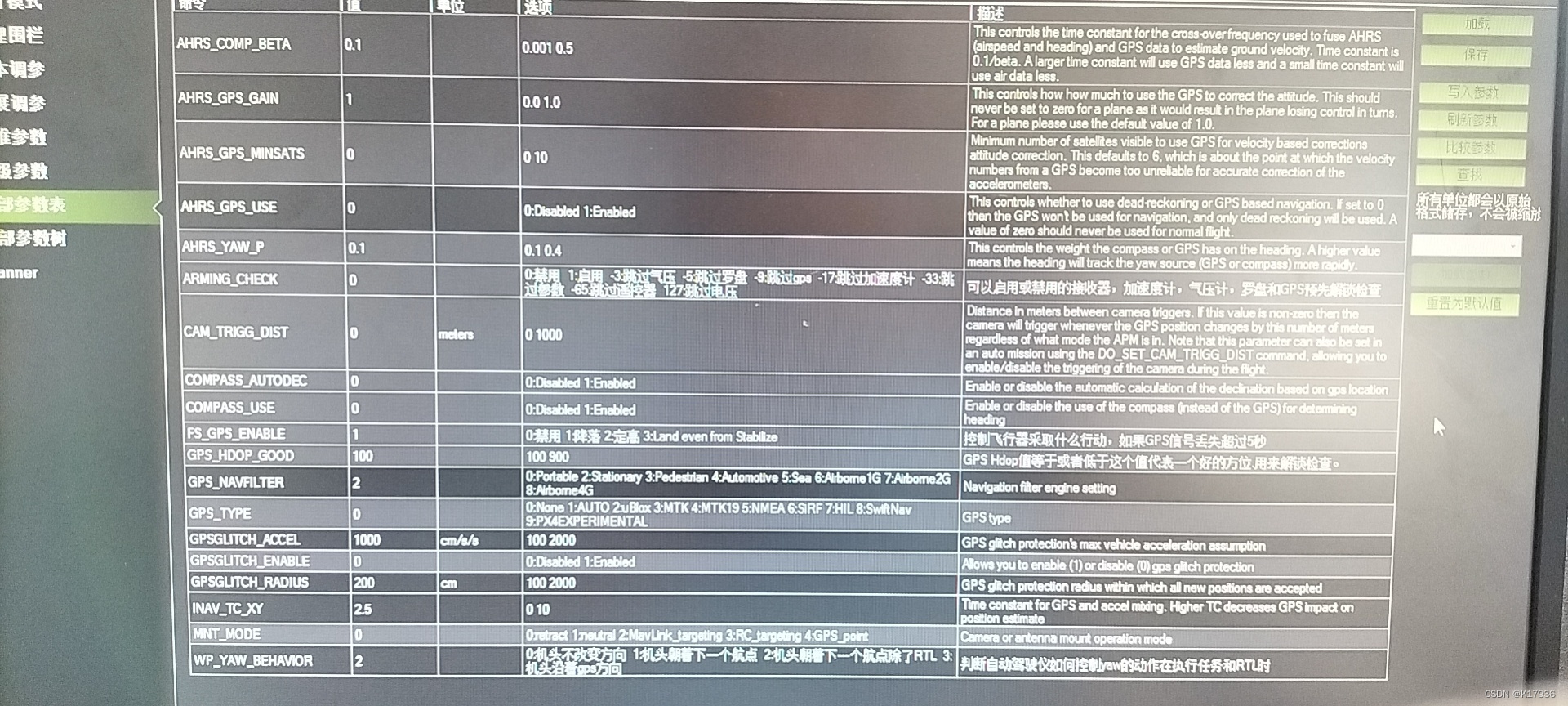
2. 通过设置参数跳过GPS校准。
下图是亲测试验可以用的GPS设置搜索GPS显示全部参数
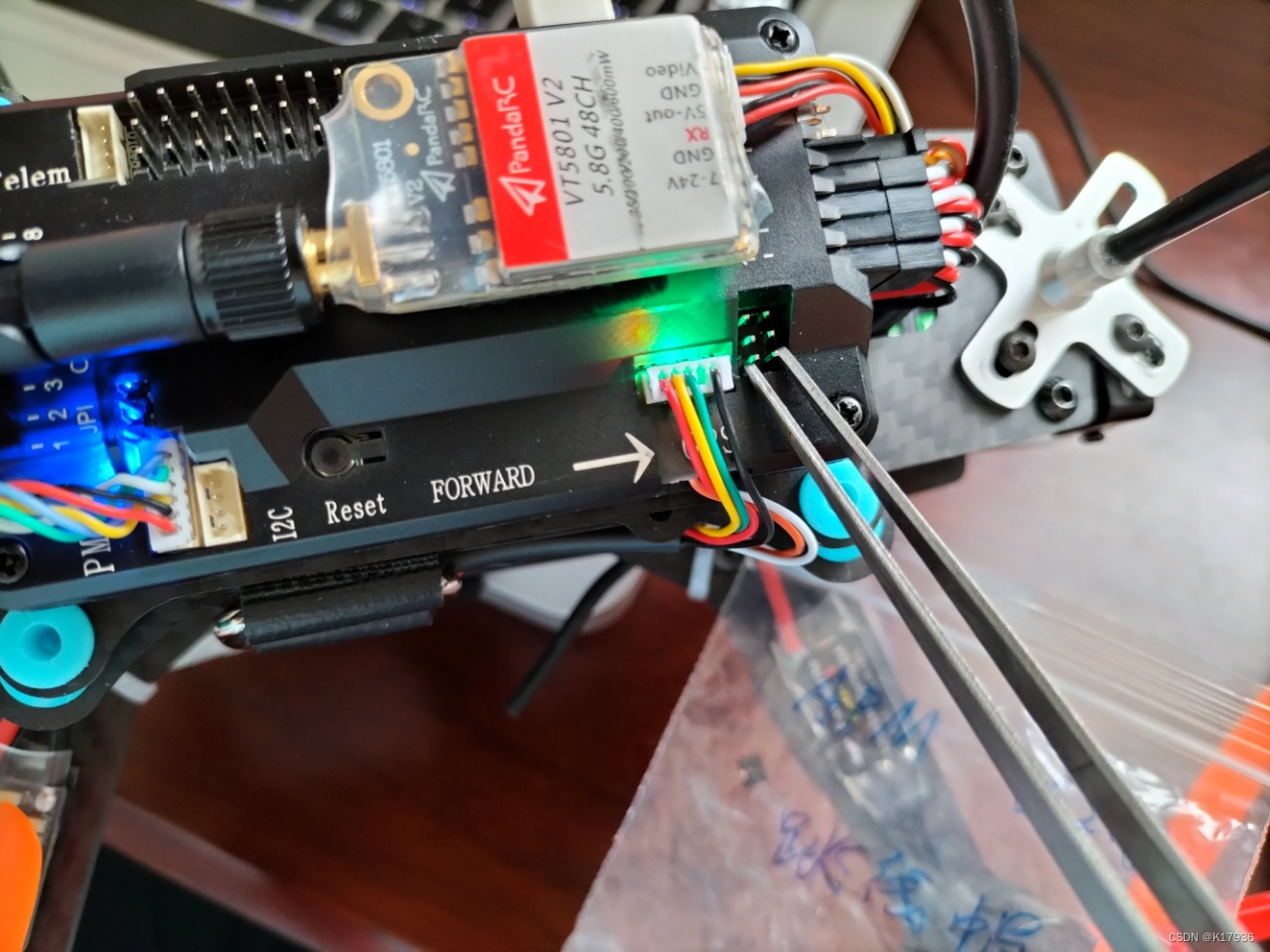
3.如果apm使用外置罗盘,启用外置罗盘需要拔掉跳线帽。
4.其他可能问题。
进行遥控器校准,看解锁涉及到的油门和偏航是否能正确操控?如需要,对遥控器接收机连接线进行检查。
将相关的硬件同其他的机器进行交换,反复确认故障硬件。
卸下螺旋桨,重新写入稳定的参数配置,校准完GPS类型后进行解锁测试。理论上不需要再进行电机校准,可以直接解锁。
apm飞控无法刷机,或飞控连接mp之后无法进行参数调整也无法解锁怎么办?
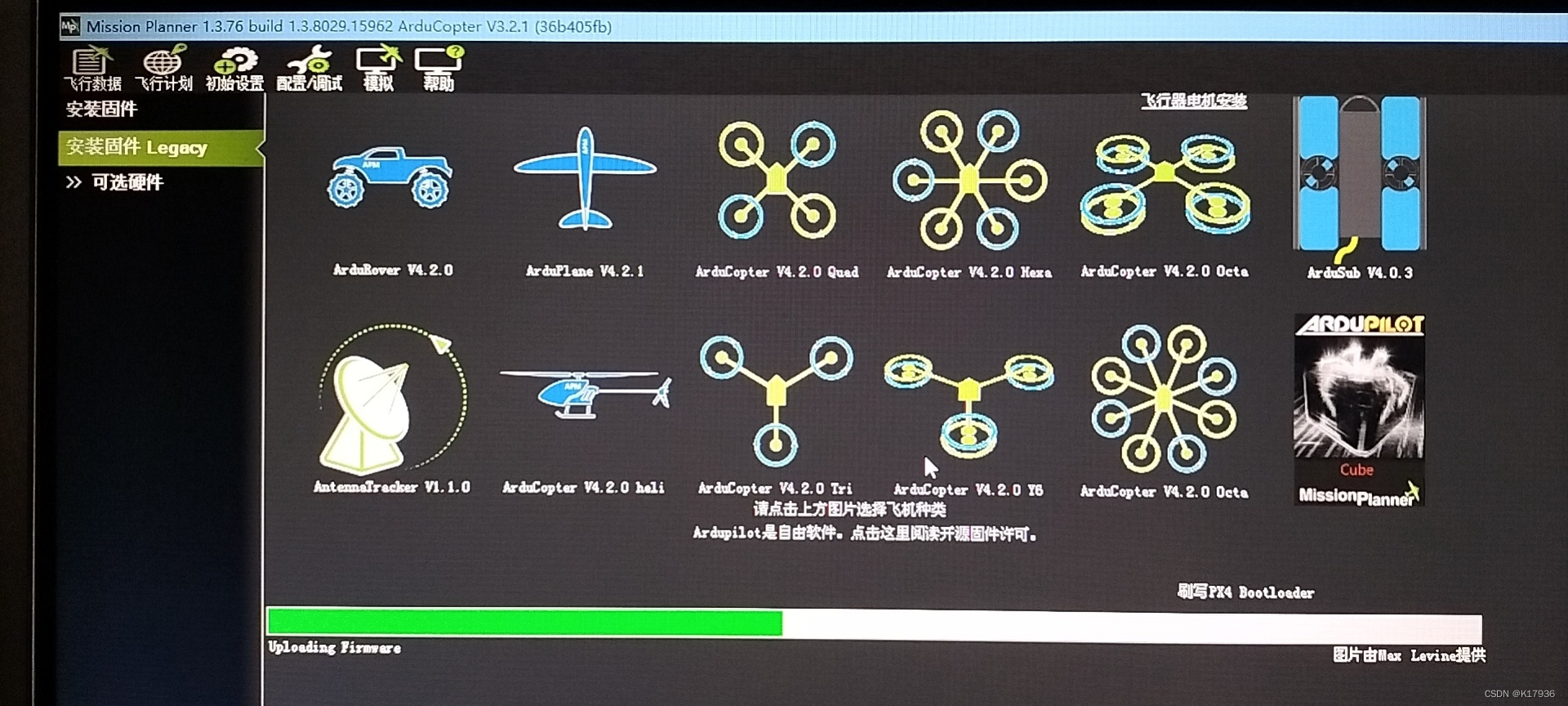
安装升级最新版mp,可能需要下载安装最新版的net framework4.8
选择安装固件legacy
选择四轴,弹出已退出历史舞台将上传一个可用版本
等待下载,刷写px4 bootloader,校验固件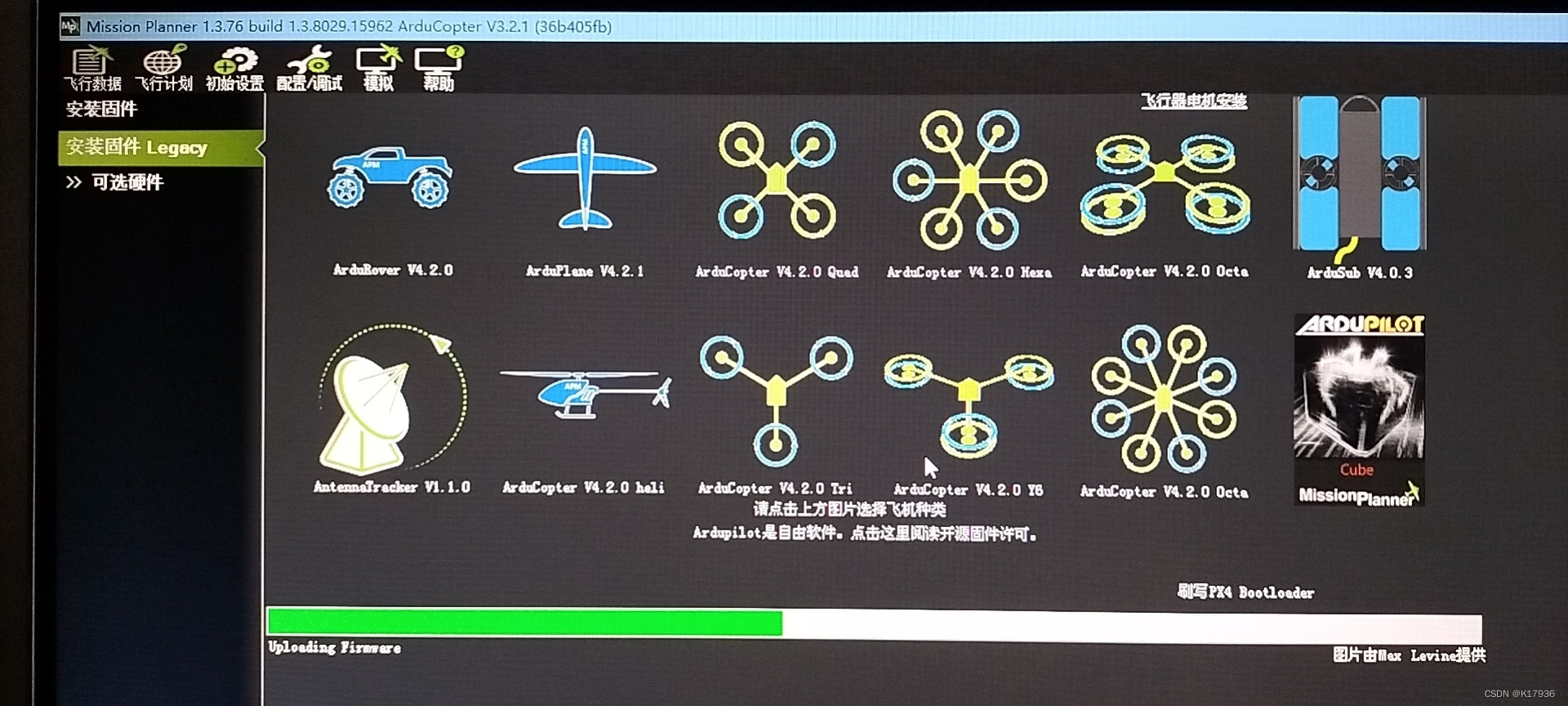
等待完成,点击连接。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/488738
推荐阅读
相关标签

