
- 1数据结构 易错题合集(持续更新)_数据结构易错题
- 2跟着医生学kivy:kivy-garden 究竟怎样安装?_kivy garden安装
- 3在 QML 中,ComboBox 是一种常用的用户界面控件,通常用于提供一个下拉式的选择框,允许用户从预定义的选项列表中选择一个值_qml 下拉框
- 4当35岁中年危机码农遇上GPT.....
- 5基于大语言模型的智能问答系统设计与实践_基于大模型的智能问答技术
- 6c++有趣的代码_C++开源项目:十行代码15个BUG,你入坑了吗?
- 7基于SpringBoot面向智慧教育的实习实践系统
- 8在红帽上搭建dm7的主备的一些问题_dm7主备搭建守护进程报错无法绑定端口
- 9openlayers入门添加百度地图绘制点线面_openlayers 添加百度地图
- 10如何用python进行接口测试(详细教程)_python接口测试
ZYNQ:【1】深入理解PS端的TTC定时器(Part1:原理+官方案例讲解)_定时器分配率ps
赞
踩
碎碎念:好久不见,甚是想念!本期带来的是有关ZYNQ7020的内容,我们知道ZYNQ作为一款具有硬核的SOC,PS端很强大,可以更加便捷地实现一些算法验证。本文具体讲解一下里面的TTC定时器,之后发布的Part2将基于具体项目出发,实现PS端单核进行六路不等长占空比的PWM输出~
虽然最后对我自己毕业好像没有什么帮助QAQ,但是毕竟花费了一些时间阅读手册等内容,还是打算记录一下供大家参考。
目录
1.3.2 事件定时器/脉宽计数器(Event Timer)操作
1.设置中断系统:SetupInterruptSystem()
4.逐渐修改占空比:WaitForDutyCycleFull()
1 TTC原理分析
这一部分我们直接按照UG585的思路,进行分析和介绍,由于原文的内容本身是英文理解起来还是需要一些经验(尽管更推荐去阅读原文部分)。
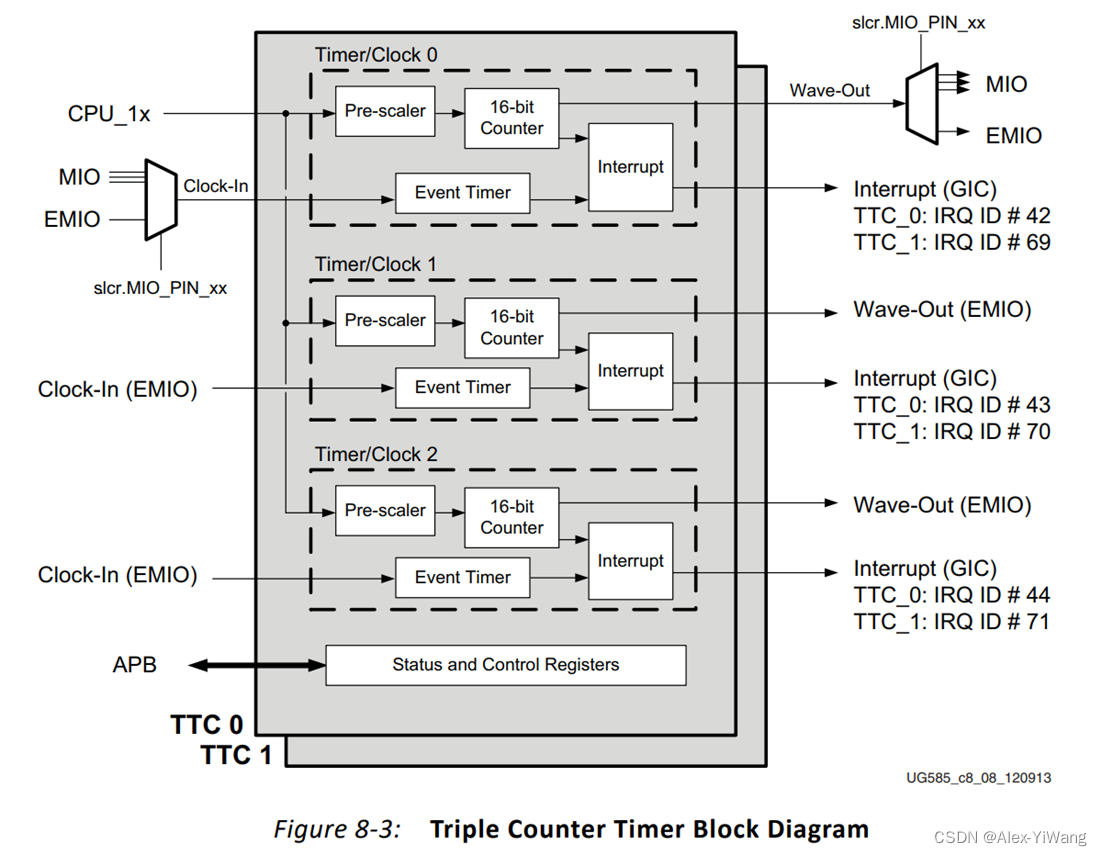
TTC包含了三个独立的定时器,分别是上图中的Timer/Clock 0、Timer/Clock 1、Timer/Clock 2。从左下角可以看到在PS端包含两个TTC,分别是TTC0和TTC1,因此两个TTC共包含6个独立的定时器。TTC控制器可以通过修改nic301_addr_region_ctrl_registers.security_apb [ttc1_apb]这个寄存器的位,来实现对于安全模式(secure mode)和非安全模式(non-secure mode)的切换。对于这两种模式的内容可以参考下面:
Secure mode and Non-secure mode:
这两种模式来源于ARM TrustZone技术,ARM在CPU的常规模式之外引入了一种称为“安全模式”的特殊CPU模式,建立了“安全世界”和“正常世界”之间的的概念。默认情况下,安全世界访问正常世界的所有状态,反之则不然。由于ARM基本使用的都是基于存储映射的结构,我的理解是通过这两种模式的分隔,来实现对于重要寄存器的保护。
每个TTC有如下特点:
1.三个独立16位预分频器和16位的向上/向下计数器。(向上:0,1,2,3,4... 向下:9,8,7,6...)
2.可选的时钟源输入(内部PS总线时钟:CPU_1x,内部时钟:PL,外部时钟:MIO)
3.对于TTC内部每一个counter,都各自有一个中断
4.在一定间隔内的溢出中断,或者计数匹配到设定的值时会发出中断
5.产生波形输出,可以通过MIO或者PL(EMIO)
1.2 结构框图
通过上面的结构框图,对于TTC中第一个计数器Timer/Clock 0的时钟输入、波形输出信号的多路控制是通过slcr.MIO_PIN_xx寄存器实现的,默认情况下使用EMIO接口。
1.3 功能描述
每个预分频模块(Pre-scaler)都可以独立设置为使用PS内部总线时钟或者外部时钟(来自MIO或者PL)。对于外部时钟输入,通过使用SLCR寄存器来选择具体的信号输入。预分频模块可以将输入时钟在/2和/65536之间进行分频,当如分频寄存器为0的时候,会对时钟进行二分频,之后输出给后面的计数器。
计时器可以设置为增计数、减计数,并且通过设置间隔寄存器的值,可以控制计数的范围。同时可以比较三个匹配寄存器的值和计数器(一个TTC包含3个计数器Counter和3组匹配寄存器)的值,产生中断信号。
中断模块组合了各种类型的中断:计数器间隔中断(Interval Interrupt)、计数器匹配中断(Match Interrupt)、计数器溢出中断(Overflow Interrupt)、事件计时器溢出。每种类型都可以单独启用。
1.3.1 操作模式
一个TTC中的每个计数器模块,都可以独立编程,并以以下两种模式中的任何一种运行。
间隔模式(Interval mode):
通过修改计数器控制寄存器(Counter Control register)的DEC位,可以控制计数器的计数方向是+1还是-1。通过修改间隔计数器(Interval mode)的值可以控制计数的范围是0到间隔计数器的值。当计数值经过0的时候,会产生一个计数器间隔中断(Interval Interrupt)。当计数器的值等于匹配计数器(Match register)值的时候,会产生一个匹配中断(Match Interrupt)。
溢出模式(Overflow mode):
计数器在0x0000和0xFFFF之间连续的+1或者-1变化,并通过修改计数器控制寄存器的DEC位来控制计数的方向。当计数值经过0的时候,会产生一个溢出中断(Overflow Interrupt)。当计数器的值等于匹配计数器值的时候,会产生一个匹配中断。
1.3.2 事件定时器/脉宽计数器(Event Timer)操作
从名字脉宽计数器,可以推断出其功能是对外部输入信号的脉宽进行测量,原理有一些类似电机差分编码器的M法测速。
事件定时器内部有一个对用户不可见的16位内部计数器(Internal Counter),该计数器被CPU_1x的时钟控制,其满足如下两个条件:
1.当外部脉冲的非计数阶段,被重置为0
2.在外部脉冲的计数阶段,开始增加
修改事件定时器控制内部计数器的行为,主要通过三个位来控制:
1 E_En bit 使能位,等于0时,将内部计数器复位到0,并停止计数
2 E_Lo bit 指定外部脉冲的计数相位
3 E_Ov bit 指定如何处理当内部计数器溢出时,如何处理。
当为0的时候,溢出导致E_En置为0;
当为1的时候,溢出导致内部计数器继续循环计数;
在另一个寄存器的控制下,可以决定溢出时是否产生中断(而与E_Ov bit本身的值无关)。
当外部计数脉冲的计数相位结束的时候,会使用内部计数器的非零计数值对事件寄存器(Event Register)的值进行更新。因此,这个值展示了外部脉冲的宽度。由于内部计数器被CPU_1x的时钟控制,因此脉冲宽度是由CPU_1x的时钟周期数来衡量的。
当外部计数脉冲的计数相位阶段,如果内部计数器由于溢出被重置为0,那么事件寄存器将不会被更新,并保持上次非溢出计数操作的旧值。
| 功能 | 名称 | 概述 |
| 时钟控制 | 时钟控制寄存器 | 控制预分频器,选择时钟输入,选择边沿 |
| 计数器控制寄存器 | 使能计数器,设置操作模式,设置计数方向,使能匹配,使能波形输出 | |
| 状态 | 计数器数值寄存器 | 返回计数器的当前值 |
| 计数器控制 | 间隔寄存器 | 设置间隔值 |
| 匹配寄存器1 匹配寄存器2 匹配寄存器3 | 设置匹配值,一共有3组,对应了一个TTC内部的3个Counter(这种说法不准确,其实每个Counter都有自己的一组三个匹配寄存器) | |
| 中断 | 中断寄存器 | 显示当前中断状态 |
| 中断使能寄存器 | 使能中断 | |
| 事件 | 事件控制计时器寄存器 | 使能事件计时器,停止计时器,设置计数相位 |
| 事件寄存器 | 显示外部脉冲的宽度(即内部计数器的计数值) |
1.5 编程模型
1.5.1 计数器使能的步骤
- 选择时钟输入源,设置预分频值(slcr.MIO_MUX_SEL registers, TTC Clock Control register),进行这一步前需要保证TTC处于不使能状态(slcr.MIO_MUX_SEL registers, TTC Clock Control register)
- 设置间隔值(Interval register),这一步骤是可选的,仅在间隔模式进行
- 设置匹配值(Match registers),这一步是可选的,如果匹配是使能状态则需要设置
- 使能中断(Interrupt Enable register),这一步是可选的,如果需要中断则需要使能
- 设置波形输出的使能状态,设置匹配的使能状态,设置计数的方向,设置模式,使能计数器 (TTC Counter Control register),这一步开启计数器
1.5.2 计数器停止的步骤
- 读取当前计数器控制器的值
- 设置DIS位为1,保持其他位不变
- 将上面修改了DIS位的数值写回计数器控制器
1.5.3 计数器重启的步骤
- 读取计数器控制器的值
- 设置RST位为1,保持其他位不变
- 将上面修改了DIS位的数值写回计数器控制器
1.5.4 事件计数器(脉宽计数器)使能的步骤
- 选择外部脉冲源(slcr.MIO_MUX_SEL registers),所选择的外部脉冲的脉宽将会被时钟CPU_1x的周期所衡量
- 设置计数溢出时的处理,选择外部脉冲的电平,使能事件计数器(select external pulse level),这一步开始测量选择的外部脉冲的脉宽(高电平或者低电平)
- 使能中断(Interrupt Enable register),这一步是可选的,如果需要中断则需要使能
- 读取测量到的脉冲宽度(Event register),注意当计数溢出发生的时候,返回来的脉宽计数值是不准确的。具体可以看前文对事件计数器的叙述
1.5.5 清除中断和确认的步骤
- 读取中断寄存器,将会自动读取并清除中断寄存器中的所有位
1.6 计数器时钟输入的选择
下面展示了如何设置SoC选择对于TTC0中Counter/timer 0 的时钟源,使用的是一组if else 语句来实现。
if slcr.MIO_PIN_19[6:0] is 1100000, use MIO pin 19
else if slcr.MIO_PIN_31[6:0] is 1100000, use MIO pin 31
else if slcr.MIO_PIN_43[6:0] is 1100000, use MIO pin 43
else use EMIOTTC0CLKI0
TTC0 的 Counter/timer 1只能使用EMIOTTC0CLKI1
TTC0 的 Counter/timer 2只能使用EMIOTTC0CLKI2
下面展示了如何设置SoC选择对于TTC1中Counter/timer 0 的时钟源,使用的是一组if else 语句来实现。
if slcr.MIO_PIN_17[6:0] is 1100000, use MIO pin 17
else if slcr.MIO_PIN_29[6:0] is 1100000, use MIO pin 29
else if slcr.MIO_PIN_41[6:0] is 1100000, use MIO pin 41
else use EMIOTTC1CLKI0
TTC1 的 Counter/timer 1只能使用EMIOTTC1CLKI1
TTC1 的 Counter/timer 2只能使用EMIOTTC1CLKI2
IMPORTANT:当选择MIO引脚或EMIOTTCxCLKIx作为时钟源时,如果时钟停止运行,相应的计数值寄存器将保留旧值,而不管时钟已经停止的事实。在这种情况下必须谨慎。这句话理解为,时钟停止运行这件事可能是很容易被忽略的。
2 SDK分析
2.1 工程建立
在任意一个ZYNQ工程中进行如下配置:
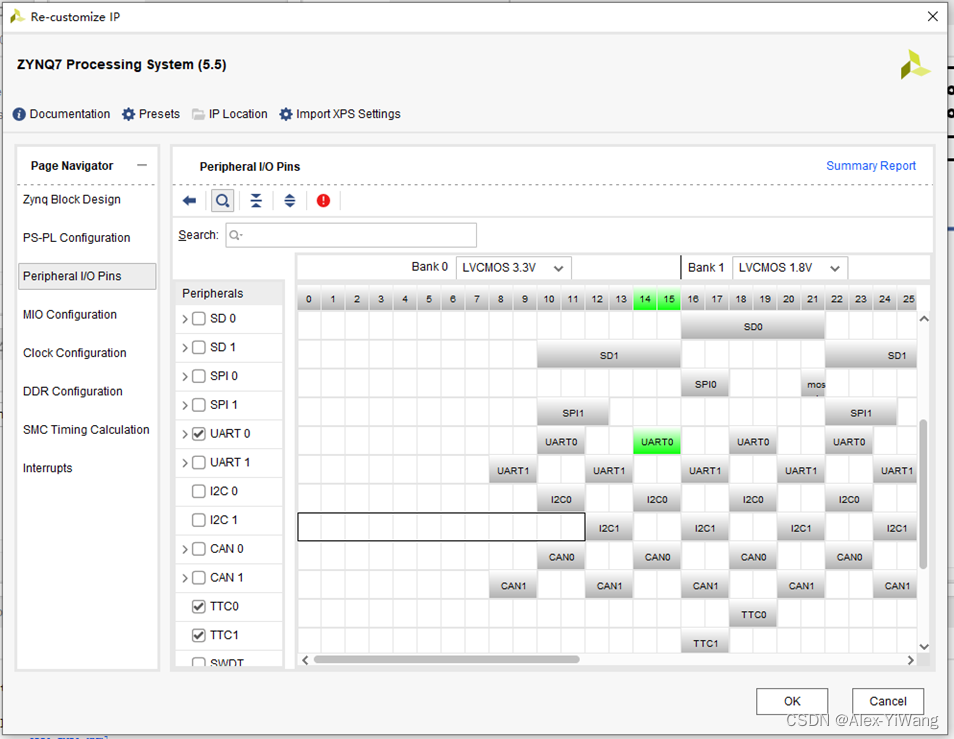
这里对TTC0和TTC1都打上对勾,在Block Design就会多出6个Pin脚。(为下一期的6占空比PWM输出做准备~)
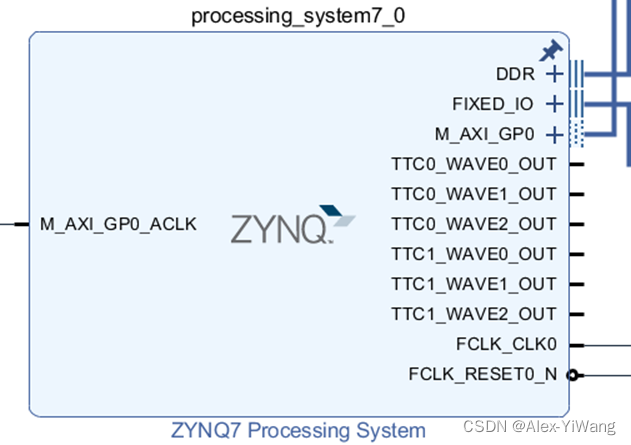
右键每一个Pin脚,设置Make External:
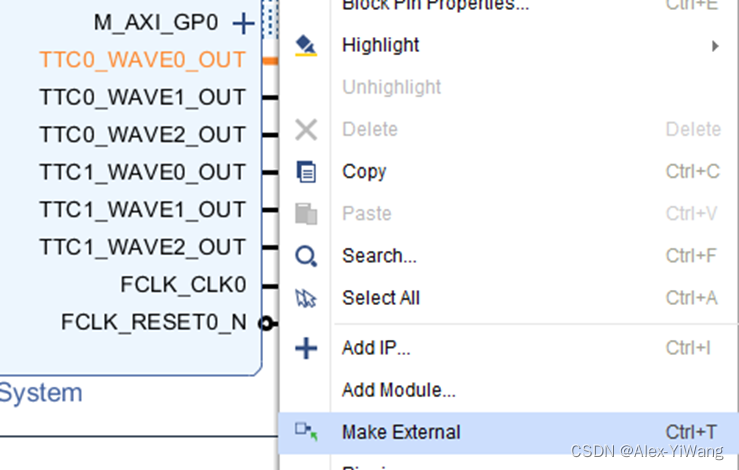
之后在xdc文件中对输出的引脚进行绑定即可。

同时可以在Clock Configuration看到时钟的频率,这里显示TTC1和TTC2的时钟源都是来自CPU_1x的内部时钟,频率是133.333333MHz

至此,Block Design部分就设置完毕了。
首先修改完Block Design之后,需要先点F6,进行Validate Design操作,验证Block Design的正确性。
之后点击Generate Output Products生成输出。

下一步点击左侧的Generate Bitstream输出比特流文件。
之后点击File-Export-Export Hardware,将硬件信息导出。
之后点击File-Lauch SDK,新建一个空的工程。(这一步的流程可以参考正点原子的领航者ZYNQ系列视频的嵌入式开发系列)
打开Vivado工程对应的SDK文件后,我们可以在左侧找到所提供的一些ttc参考文件:

我们只需要关注xttcps.h这个头文件即可,他是PS中TTC模块驱动头文件,给出了比较详细的函数定义
同时也可以找到一些示例文件:

这里主要对第一个案例进行代码的讲解。
2.2 案例分析
这里需要读者自行打开上述的案例文件~由于不需要额外硬件设置,可以直接在SDK中看到上述内容。
这里我们针对这一文件简单介绍一下ttc的设置流程。
这个文件内部给出了利用TTC产生中断的案例,共分成了几个步骤。
1.设置中断系统:SetupInterruptSystem()
Line547+552:初始化中断控制器
Line562:注册中断处理
Line569:使能中断
2.设置Ticker定时器:SetupTicker()
需要注意的是SetupTicker里面包含了信息的初始化,对单个定时器的设置,中断的设置。相当于将这几部分结合在了一起。
该函数从Line257开始,这里引用了一个数据结构TmrCntrSetup,定义在Line100
typedef struct {
u32 OutputHz; /* Output frequency */
XInterval Interval; /* Interval value */
u8 Prescaler; /* Prescaler value */
u16 Options; /* Option settings */
} TmrCntrSetup;
并且Line261调用了Line131定义的数组:
static TmrCntrSetup SettingsTable[2] = {
{100, 0, 0, 0}, /* Ticker timer counter initial setup, only output freq */
{200, 0, 0, 0}, /* PWM timer counter initial setup, only output freq */
};
可以看到这个数组分别用来设置Ticker timer和PWM timer的状态,分别包括:输出频率;间隔值;预分频系数;输出选项设置。
对于输出选项的设置,是在Line267通过或操作来实现,具体的可选参数可以看xttcps.h中的定义:

回到xttcps_intr_example中,Line267定义当前模式为间隔模式,同时设置了不输出波形。(如果这里设置输出波形,那么当计数器值等于匹配值的时候,会将输出进行翻转,实现波形输出)。
之后在Line275调用了SetupTimer函数,实现对单个定时器的具体设置。这一函数定义在Line469。注意信息的传递是通过TTC_TICK_DEVICE_ID来实现的。
主要实现的功能就是初始化设备(XTtcPs_LookupConfig、XTtcPs_CfgInitialize),将SetupTicker中的设置传递过来,分别包括(设置选项模式XTtcPs_SetOptions、计算间隔值XTtcPs_CalcIntervalFromFreq、设置间隔值XTtcPs_SetInterval、设置预分频系数XTtcPs_SetPrescaler)
设置完成后,就获得了设置好的设备TtcPsTick。
回到SetupTicker中,Line285实现对中断控制器的设置,将设备以及中断处理函数进行定义。
中断处理函数TickHandler定义在Line592,首先在Line599获取中断的类型,之后在Line600清除中断。在Line602对中断的类型进行判断,这里检测的是XTTCPS_IXR_INTERVAL_MASK,其定义以及其他类型的中断,我们可以在xttcps_hw.h找到,这里面定义了六种中断类型:

当检测到对应类型的中断,我们就利用TickCount对间隔终端出现的次数进行累加处理。
回到SetupTicker中,在Line294和Line300进行了中断的使能操作,之后在Line305设置开启定时器。
3.设置PWM定时器:SetupPWM()
这个相信也是很多人比较关注的部分。
Line328实现一些设置信息,主要是将前面的数组第二个元素存储过来。
Line334设置间隔模式、匹配模式、并使能wave的输出,这里就保证了当计数值与匹配值相同的时候,输出信号就会发生翻转。从而可以利用间隔值设置PWM的周期,利用匹配值设置PWM的占空比。
Line342同样调用SetupTimer来实现对单个定时器的具体设置,具体说明可以看上面的部分。这一函数定义在Line469。注意信息的传递是通过TTC_PWM_DEVICE_ID来实现的。
主要实现的功能就是初始化设备(XTtcPs_LookupConfig、XTtcPs_CfgInitialize),将SetupPWM中的设置传递过来,分别包括(设置选项模式XTtcPs_SetOptions、计算间隔值XTtcPs_CalcIntervalFromFreq、设置间隔值XTtcPs_SetInterval、设置预分频系数XTtcPs_SetPrescaler)
设置完成后,就获得了设置好的设备TtcPsPWM
Line352通过调用XScuGic_Connect实现对中断控制器,设备ID,中断处理函数以及匹配值指针的设置。
中断处理函数PWMHandler定义在Line637,当检测到中断信号是间隔中断(也就是表示输出了一个周期),就会在Line653调用XTtcPs_SetMatchValue进行匹配值的设置,在代码注释中提到,匹配寄存器0是特殊的,如果输出被使能,当匹配值与计数值相等时,会修改输出的极性。
但是这个地方的注释是容易被误解的,TTC定时器的三个匹配寄存器功能是不一致的,并不是都可以用于波形的输出,在ZYNQ官方实例中,register0被指定为Special,也就是当计数器与register0的匹配值相等时,会触发特殊中断事件并翻转输出电平。经试验表明,对于同一个Counter来说,register1和register2并不会影响PWM输出的翻转,但是由于每个TTC中有三个Counter,其实可以设置三个register0的值来实现三个不同占空比PWM的输出。
回到SetupPWM中,在Line361和Line367进行了中断的使能操作,之后在Line372设置开启定时器。
4.逐渐修改占空比:WaitForDutyCycleFull()
这个函数定义在Line397,主要是通过当每一次循环输出一次PWM波之后,TickHandler函数会在Line607将PWM_UpdateFlag更新为TRUE,之后会在WaitForDutyCycleFull中满足if的条件,从而修改全局变量MatchValue的值。通过中断处理函数PWMHandler中的Line643,就实现了MatchValue对MatchReg的赋值,从而在Line653可以修改MatchReg的值,进而就修改了占空比。
整体逻辑只要抓住下面三点:1.间隔模式中断:在PWM周期结束更新flag;2.修改占空比:检测flag修改全局变量,改变占空比;3.PWM输出中断处理函数(也是间隔模式中断)将匹配值设置进去。
5.停止计数器:XTtcPs_Stop()
这里直接在Line236和Line238调用了XTtcPs_Stop实现了计数器的停止。
这就是本期的全部内容啦,如果你喜欢我的文章,不要忘了点赞+收藏+关注,分享给身边的朋友哇~

