
热门标签
热门文章
- 1【转】web测试常用的用例及知识(全)_web功能测试常用测试用例设计方法
- 2传统图像降噪算法之BM3D原理详解_图像3d降噪
- 3【瑞模网】VSCode如何直接克隆git仓库代码?_vscode克隆git代码
- 4基于transformers框架实践Bert系列5-阅读理解(文本摘要)
- 5rabbitmqctl list_users报错之Error: unable to perform an operation on node ‘rabbit@192‘.
- 6uniapp ios 沙盒测试支付(苹果支付)_uniapp使用苹果支付 必须上线才能测试吗
- 7Docker 日志配置
- 8FPGA学习笔记_fpga16‘h什么意思
- 9桌面宠物来了!_如果制作桌宠 cocos
- 10OpenCV(十四):ROI区域截取_opencv如何裁剪指定区域
当前位置: article > 正文
【ROS2机器人入门到实战】RVIZ2可视化移动机器人模型_ros2 rivi
作者:小小林熬夜学编程 | 2024-06-04 00:39:57
赞
踩
ros2 rivi
8.2 RVIZ2可视化移动机器人模型
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
大家好,我是小鱼,上一节讲完joint和link,我们来把我们上面定义的简单的URDF(包含身体和雷达)用RVIZ2显示出来,直观的感受下,我们的机器人模型。
URDF可视化的步骤如下:
- 建立机器人描述功能包
- 建立
urdf文件夹编写urdf文件 - 建立
launch文件夹,编写launch文件 - 修改
setup.py配置,编译测试
1.建立功能包
轻车熟路,先创建一个chapt8_ws工作空间,然后建立功能包,包的类型选ament_python
ros2 pkg create fishbot_description --build-type ament_python
- 1
2.建立URDF文件
建立URDF文件夹,创建urdf文件
cd fishbot_description && mkdir urdf
touch fishbot_base.urdf
- 1
- 2
完成后src下的目录结构:
├── fishbot_description
│ ├── __init__.py
├── package.xml
├── setup.cfg
├── setup.py
└── urdf
└── fishbot_base.urdf
- 1
- 2
- 3
- 4
- 5
- 6
- 7
编辑fishbot_base.urdf
<?xml version="1.0"?> <robot name="fishbot"> <!-- base link --> <link name="base_link"> <visual> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <cylinder length="0.12" radius="0.10"/> </geometry> </visual> </link> <!-- laser link --> <link name="laser_link"> <visual> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.02" radius="0.02"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.8" /> </material> </visual> </link> <!-- laser joint --> <joint name="laser_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0.075" /> </joint> </robot>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
3.建立launch文件
在目录src/fishbot_description下创建launch文件夹并在其下新建display_rviz2.launch.py文件。
mkdir launch
touch display_rviz2.launch.py
- 1
- 2
完成后的目录结构:
├── fishbot_description
│ ├── __init__.py
├── launch
│ └── display_rviz2.launch.py
├── package.xml
├── setup.cfg
├── setup.py
└── urdf
└── fishbot_base.urdf
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'fishbot_description' urdf_name = "fishbot_base.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) joint_state_publisher_node = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[urdf_model_path] ) rviz2_node = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', ) ld.add_action(robot_state_publisher_node) ld.add_action(joint_state_publisher_node) ld.add_action(rviz2_node) return ld
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
想要可视化模型需要三个节点参与
joint_state_publisher_gui负责发布机器人关节数据信息,通过joint_states话题发布robot_state_publisher_node负责发布机器人模型信息robot_description,并将joint_states数据转换tf信息发布rviz2_node负责显示机器人的信息
这里我们用到了joint_state_publisher_gui和robot_state_publisher两个包,如果你的系统没有安装这两个包,可以手动安装:
sudo apt install ros-$ROS_DISTRO-joint-state-publisher-gui ros-$ROS_DISTRO-robot-state-publisher
- 1
joint_state_publisher_gui,还有一个兄弟叫做joint_state_publisher两者区别在于joint_state_publisher_gui运行起来会跳出一个界面,通过界面可以操作URDF中能动的关节
4.修改setup.py
导入头文件
from glob import glob
import os
- 1
- 2
加入目录安装
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
- 1
- 2
- 3
完整
from setuptools import setup from glob import glob import os package_name = 'fishbot_description' setup( name=package_name, version='0.0.0', packages=[package_name], data_files=[ ('share/ament_index/resource_index/packages', ['resource/' + package_name]), ('share/' + package_name, ['package.xml']), (os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')), (os.path.join('share', package_name, 'urdf'), glob('urdf/**')), ], install_requires=['setuptools'], zip_safe=True, maintainer='root', maintainer_email='root@todo.todo', description='TODO: Package description', license='TODO: License declaration', tests_require=['pytest'], entry_points={ 'console_scripts': [ ], }, )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
5.编译测试
编译
colcon build
- 1
运行测试
source install/setup.bash
ros2 launch fishbot_description display_rviz2.launch.py
- 1
- 2
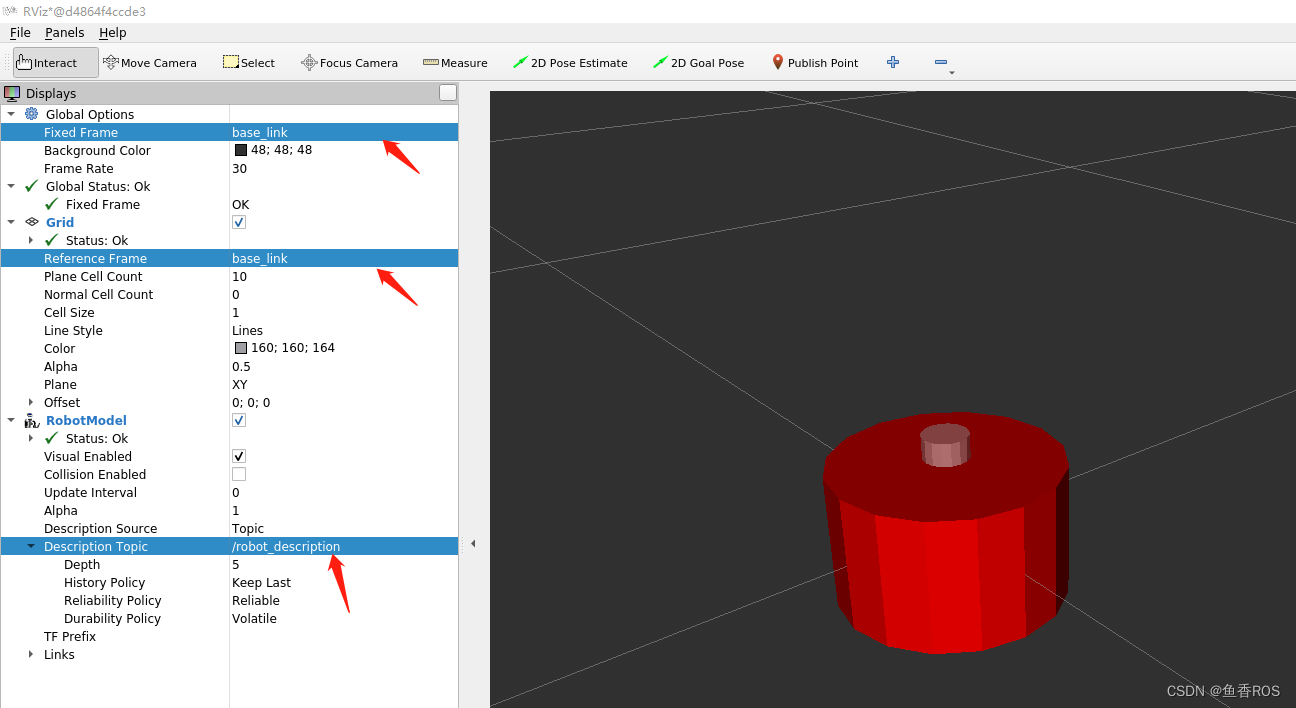
添加robotmodel模块,分别选择link名称如下,即可看到机器人的模型显示
此时看看节点关系图
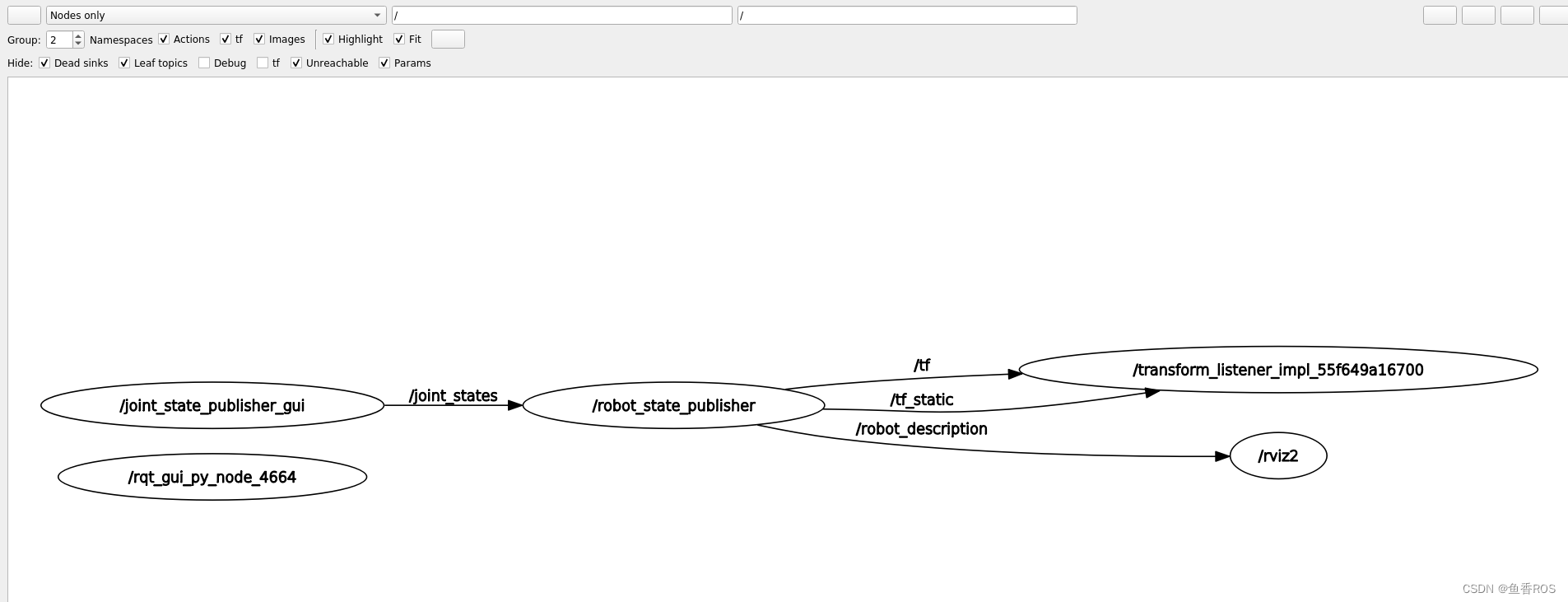
这里大家可以参考图理一理launch文件中启动的三个节点的关系。
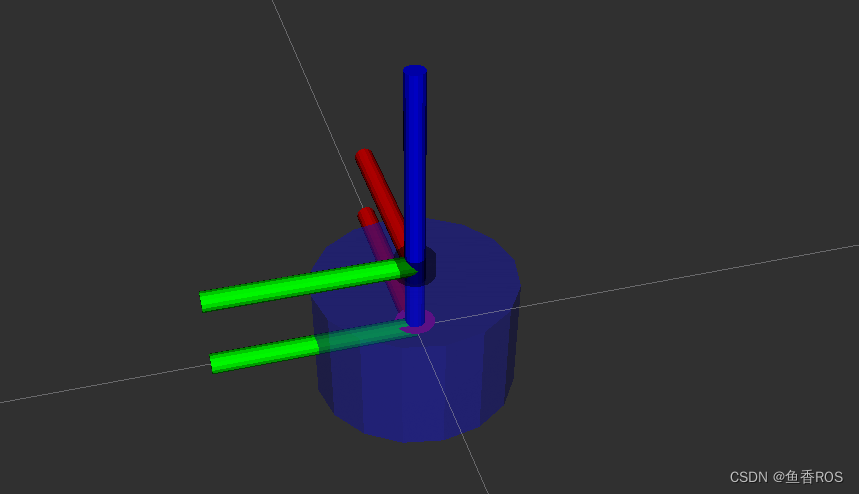
然后打开TF模块,看一下机器人的坐标系关系
6.本节练习
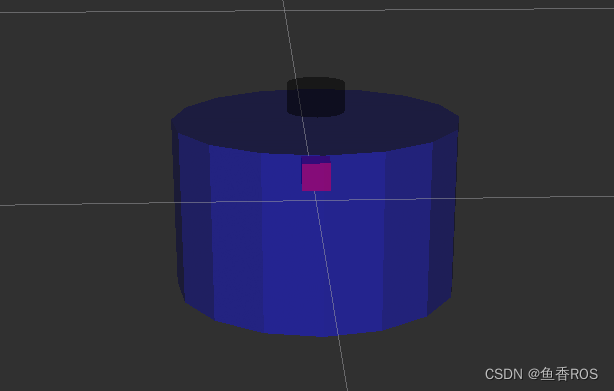
练习1:尝试将修改机器人身体颜色为蓝色,透明度为50%(0.1 0.1 1.0 0.5)
练习2:尝试在URDF中添加imu_link并使用imu_joint将其固定在车体的中心上方2cm,imu采用的几何形状为box。长宽高均为2cm
结果展示:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/669609
推荐阅读
相关标签

