
热门标签
热门文章
当前位置: article > 正文
EVO工具评估ORB-SLAM3精度和误差_orbslam评估绝对轨迹误差
作者:小小林熬夜学编程 | 2024-06-07 09:29:01
赞
踩
orbslam评估绝对轨迹误差
最近在做SLAM的项目,由于需要评估改进后的SLAM系统的精度和误差,使用到EVO工具,记录一下EVO的使用。
利用EVO得到ORB-SLAM3的精度指标数据
首先安装EVO工具
-
- sudo apt install python-pip
-
- pip install evo --upgrade --no-binary evo
-
- or
-
- pip install evo --upgrade --no-binary evo --user
-
- pip install numpy --upgrade --user
补充:安装后evo如果不能正常运行,电脑重新启动即可
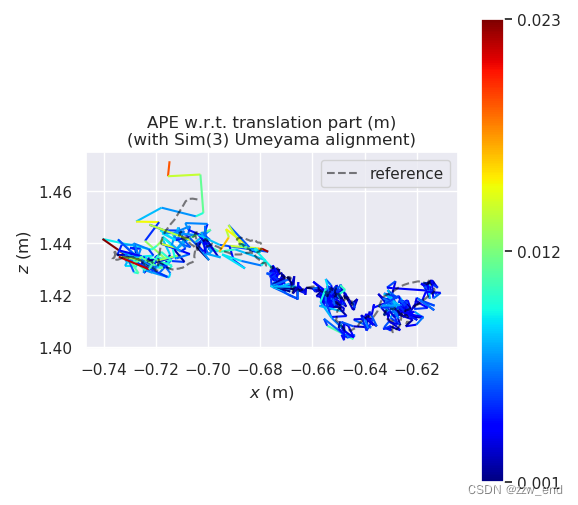
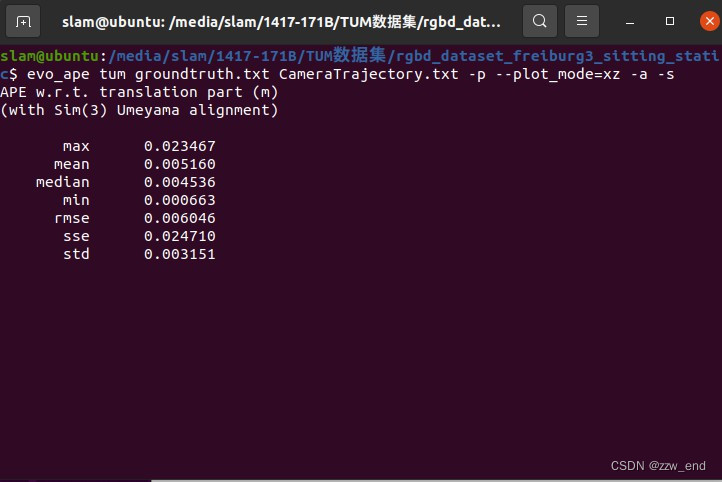
对于运行TUM数据集得到的CameraTrajectory.txt和groundtruth.txt以及KeyFrame.txt等文件,运行
evo_ape tum CameraTrajectory.txt groundtruth.txt --plot_mode=xz -a -s 来得到RMSE、Std和Mean等数据以及误差图。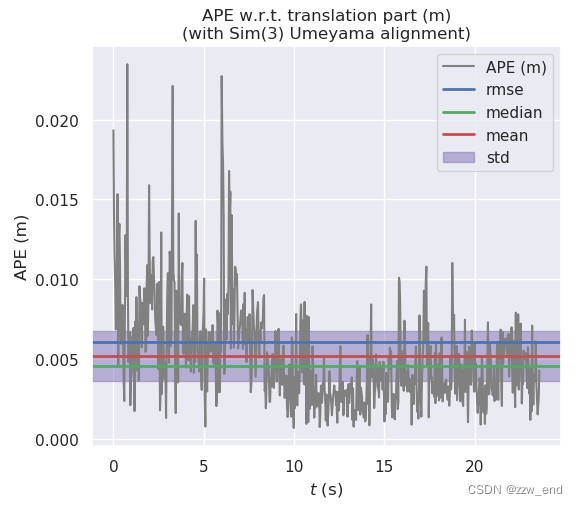
在TUM官网下载evaluate_ate.py,利用 CameraTrajectory.txt和groundtruth.txt生成associate.pyc文件,再运行
puthon2 evaluate_ate.py --save alignedTrajectory_ate.txt --plot ate.png groundtruth.txt CameraTrajectory.txt得到轨迹误差图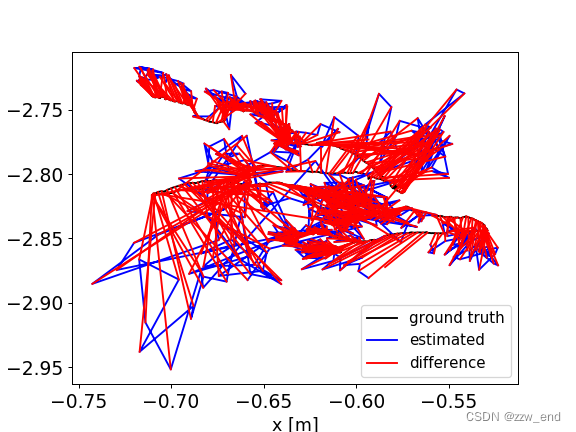
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/684837
推荐阅读
相关标签

