
热门标签
热门文章
- 1stm32单片机智能家居智能窗帘控制系统Proteus仿真全套资料_keil5arm、stm32cubemx、proteus 8 实现弄的智能家居主要技术
- 2Mac-iTerm2安装、配置和使用_mac安装iterm2
- 3io.net Windows保姆教程,手把手教你如何用Bitget部署撸空投_ionet教程
- 4【参数辨识】基于卡尔曼滤波EKF的多旋翼无人机模型参数辨识Matlab和simulink复现
- 5基于JAVA+SpringBoot+Vue+uniApp小程序的心理健康测试平台
- 6智慧矿山:EasyCVR助力矿井视频多业务融合及视频转发服务建设
- 7数据结构之“栈”(全方位认识)
- 860、基于浅层神经网络的数据拟合(matlab)
- 9在gitee上部署静态html表白烟花页面,Gitee Go (持续集成)服务(保姆级图文+实现代码)【杂记】_gitee 部署html
- 10图像算法八 —— 多种边缘检测算法(Sobel算子、Isotropic Sobel算子、Roberts算子、Prewitt算子、Laplacian算子、Canny算子)介绍及比较_边缘检测算子
当前位置: article > 正文
基于非线性模型预测控制的STM32MPC目标跟踪约束及casadi插件应用,基于非线性模型预测控制的STM32MPC Target-Tracking UAV目标跟踪约束及casadi插件的应用
作者:小惠珠哦 | 2024-07-10 15:58:23
赞
踩
基于非线性模型预测控制的STM32MPC目标跟踪约束及casadi插件应用,基于非线性模型预测控制的STM32MPC Target-Tracking UAV目标跟踪约束及casadi插件的应用
STM32MPC_Target-Tracking_UAV基于非线性模型预测控制的目标跟踪约束
matlab 需要插件casadi插件
仅供参考
有参考文件
ID:27315697830321684
馨儿佑儿
STM32MPC_Target-Tracking_UAV基于非线性模型预测控制的目标跟踪约束
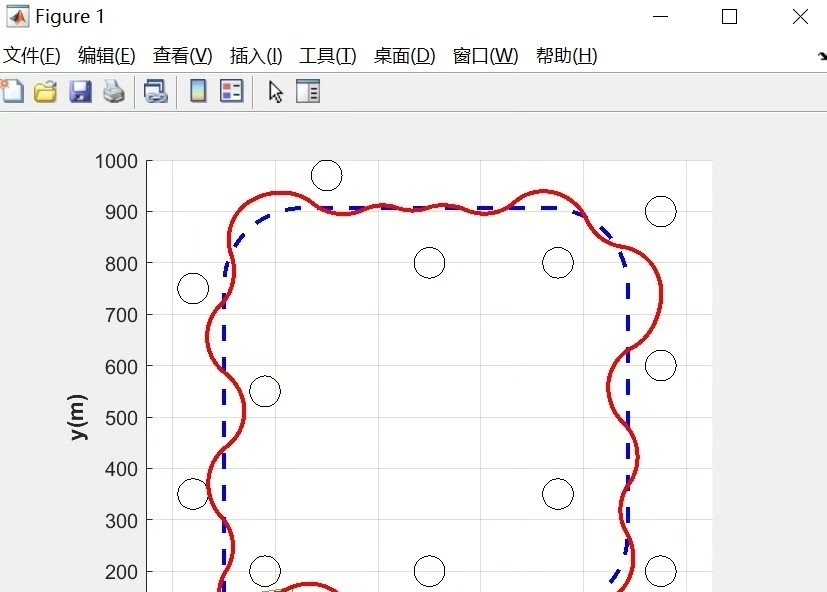
在无人机(UAV)的发展中,目标跟踪一直是一个重要的技术挑战。对于许多应用场景来说,如灾害监测、边境巡逻和环境调查等,UAV能够提供快速、高效、灵活的飞行能力,实现对目标的追踪与监测。因此,如何设计一种准确、稳定且可靠的目标跟踪控制算法成为了研究的热点之一。
本文提出了一种基于非线性模型预测控制的目标跟踪算法,并在STM32MPC平台上实现了该算法。该算法通过预测目标的运动轨迹,以及根据实际测量数据进行修正,实现了对目标的准确跟踪。
在本文中,我们首先介绍了非线性模型预测控制(NMPC)的基本原理和算法流程。NMPC是一种基于模型的控制方法,通过预测系统的未来状态和控制输入,优化控制目标并生成最优控制策略。由于其能够处理非线性系统和约束条件,NMPC在目标跟踪中具有很好的应用潜力。
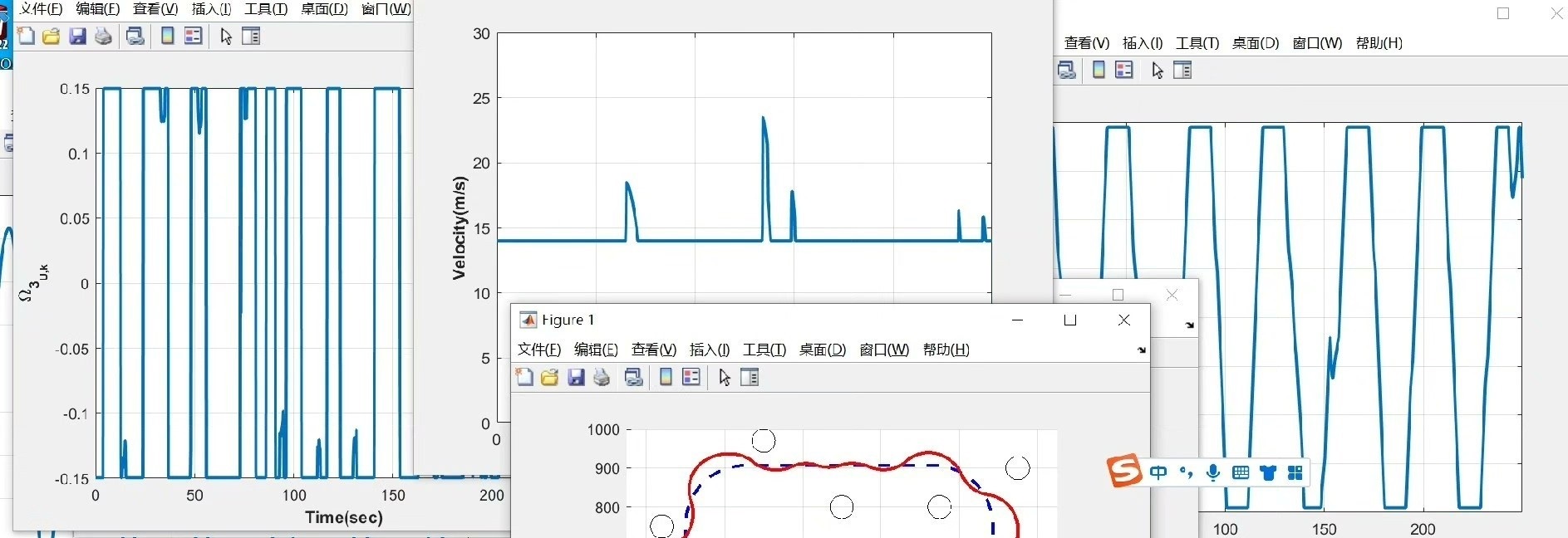
然后,我们详细介绍了基于NMPC的目标跟踪算法。该算法首先利用目标的位置和速度信息构建非线性动力学模型,然后根据模型进行目标轨迹的预测。在预测的过程中,考虑到UAV的动力学特性和约束条件,我们对目标轨迹进行修正,并生成最优控制策略。最后,我们将算法实现在STM32MPC平台上,并进行了实验验证。
在实验中,我们
【相关代码,程序地址】:http://fansik.cn/697830321684.html
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小惠珠哦/article/detail/806796
推荐阅读
相关标签

