
- 1chatglm6b和闻达的功能扩展_chatglm 本地知识库
- 2scp命令——安全传输文件_scp 远程到本地
- 3解决Mac OS升级系统后git无法使用的问题_macos sonoma上使用git遇到的问题
- 4搭建个人服务器_自己搭建服务器
- 5动态路由 华三nat 静态路由_H3CNE学习---静态路由、动态路由协议
- 6Git:将本地仓库上传至GitHub的远程仓库_git提交到远程仓库命令
- 7使用RPA通过GPT大模型AI Agent自动执行业务流程任务企业级应用开发实战:如何选取符合业务需求的AI模型和技术_大模型应用流程
- 8一文读懂 MySQL 索引 B+树原理!_mysql索引b+树
- 9JS 创建表格_js表格
- 10如何保证同事的代码不会腐烂?一文带你了解 Alibaba COLA 架构_alibaba.cola.statemachine
计算机算法分析与设计(8)---图像压缩动态规划算法(含C++代码)_c++图像压缩
赞
踩
一、知识概述
1.1 问题描述
1. 一幅图像的由很多个像素点构成,像素点越多分辨率越高,像素的灰度值范围为0~255,也就是需要8bit来存储一个像素的灰度值信息。
注意:在灰度图像中,全0表示黑色,全1表示白色。
2. 一幅由n×m像素点构成的图像,所需存储空间大小为:n×m×8bit=8nmbit(这是非常大的,直接传输很慢)。这个时候大家应该有了一些小的疑问:我能不能用更少的位数来表示灰度值?(因为有的灰度值并没有达到255这么大)所以我们引入了图像压缩算法来解决这个问题。
1.2 算法思想
1. 图像压缩:将像素序列分段,段内的像素灰度值相似(可以用小于8bit的空间来存储一个像素灰度值),一段内的像素用相同的bit数来存储,只需要额外存储每段的长度和bit数即可,这样可以节省很多空间。
2. 但是分组会带来一个新的问题:我如何表示当前组中像素的个数和像素的位数呢?
这里我们引入两个固定位数的值来表示:①我们用3位数字来表示当前组的每一位像素的的bit位数。②我们引入8位数字来表示当前组中像素点的个数。
因为我们在这里规定了一组中最多存储0~255个(
2
8
2^8
28)数字,而一个灰度值最多有8位(
2
3
2^3
23),所以我们可以用即3位数字来表示当前组的像素位数(注意这里都是二进制)。
1.3 算法设计
1. {6, 5, 7, 5, 245, 180, 28, 28, 19, 22, 25, 20}这是一组灰度值序列。我们按照默认的存储方法来看,一共12个数字,所以12×8=96位来表示。
2. 而下面我们将其进行分组:第一组4个数,最大是7所以用3位表示;第二组2个数,最大是245所以用8位表示;第三组6个数,最大是28所以用5位表示。这个时候,我们最后得到了最后的位数结果为:4×3+2×8+6×5+11×3=91。

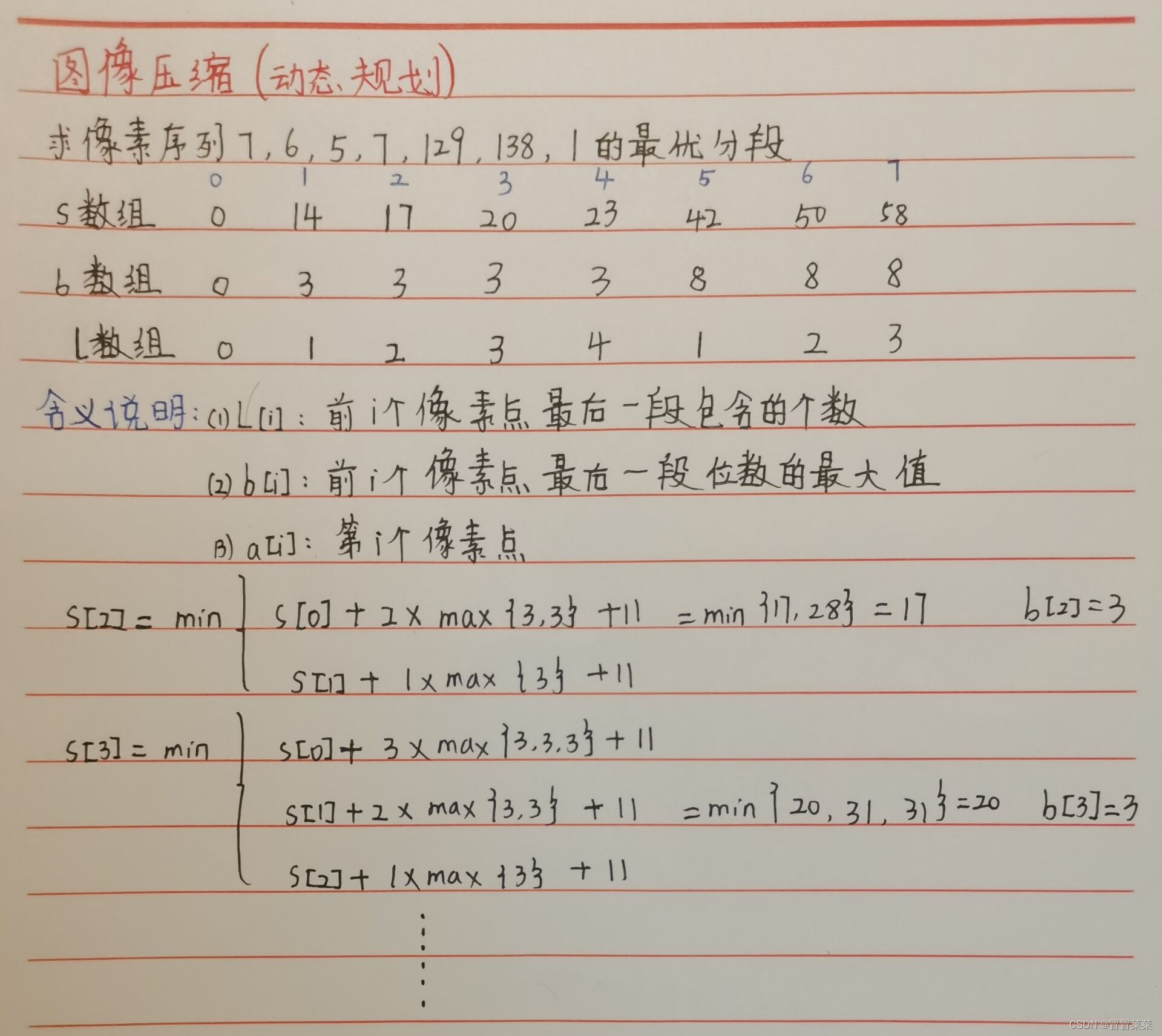
3. 压缩过程中的数组存储:
- s [ i ] s[i] s[i]来记录前 i 个数字的最优处理方式得到的最优解。
- l [ i ] l[i] l[i]中来记录当前第 i 个数所在组中有多少个数。
- b [ i ] b[i] b[i]中存放前 i 个像素点最后一段位数的最大值。
4. 递推关系式:


1.4 例题分析
二、代码
#include <iostream> using namespace std; const int N = 7; int length(int i); void Compress(int n,int p[],int s[],int l[],int b[]); void Tracebace(int n,int& i,int s[],int l[]); void Output(int s[],int l[],int b[],int n); int main() { int p[] = {0,10,12,15,255,1,2};//图像灰度数组 下标从1开始计数 int s[N],l[N],b[N]; cout<<"图像的灰度序列为:"<<endl; for(int i=1;i<N;i++) //输出原灰度序列 { cout<<p[i]<<" "; } cout<<endl; Compress(N-1,p,s,l,b); Output(s,l,b,N-1); return 0; } void Compress(int n,int p[],int s[],int l[],int b[]) { int Lmax = 256,header = 11; s[0] = 0; for(int i=1; i<=n; i++) { b[i] = length(p[i]); //计算像素点p需要的存储位数 int bmax = b[i]; s[i] = s[i-1] + bmax; l[i] = 1; for(int j=2; j<=i && j<=Lmax;j++) { if(bmax<b[i-j+1]) { bmax = b[i-j+1]; } if(s[i]>s[i-j]+j*bmax) { s[i] = s[i-j] + j*bmax; l[i] = j; } } s[i] += header; } } int length(int i) //i表示p数组中元素的值 { int k=1; i = i/2; while(i>0) { k++; i=i/2; } return k; } void Traceback(int n,int& i,int s[],int l[]) { if(n==0) return; Traceback(n-l[n],i,s,l); s[i++]=n-l[n];//重新为s[]数组赋值,用来存储分段位置 } void Output(int s[],int l[],int b[],int n) { //在输出s[n]存储位数后,s[]数组则被重新赋值,用来存储分段的位置 cout<<"图像压缩后的最小空间为:"<<s[n]<<endl; int m = 0; Traceback(n,m,s,l); s[m] = n; cout<<"将原灰度序列分成"<<m<<"段序列段"<<endl; for(int j=1; j<=m; j++) { l[j] = l[s[j]]; b[j] = b[s[j]]; } for(int j=1; j<=m; j++) { cout<<"段长度:"<<l[j]<<",所需存储位数:"<<b[j]<<endl; } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94

