
热门标签
热门文章
- 1关于深度学习中Baseline, Benchmark, SOTA的理解_深度学习发文章选择什么作为base
- 2无人驾驶汽车的相关技术,无人驾驶相关技术知识
- 3设计模式之单例模式(C++)_单例模式设计c
- 4docker 部署_Kooteam搭建之Docker部署
- 5fork的相关知识及例题_fork函数题目
- 6Presonus Studio One 4 & 5 Soundsets Complete 原厂拓展音色和效果包_studioone4效果包
- 7不谈现实,只聊游戏,《幻兽帕鲁》到底有什么玩的?_帕鲁like游戏
- 8AI绘画Stable diffusion的SDXL模型超详细讲解,针不错!(含实操教程)_total amount of video memory allocated by the torc
- 9谷歌浏览器网站打不开,显示叹号_您与此网站之间建立的连接不安全请勿在此网站上输入任何敏感信息(例如密码或信用
- 10打造安全高效的身份管理:七大顶级CIAM工具推荐
当前位置: article > 正文
ROS基础学习(根据Gmapping接口需求运行建图)(十二)
作者:小桥流水78 | 2024-07-10 09:33:13
赞
踩
ROS基础学习(根据Gmapping接口需求运行建图)(十二)
Gmapping
gmapping接口
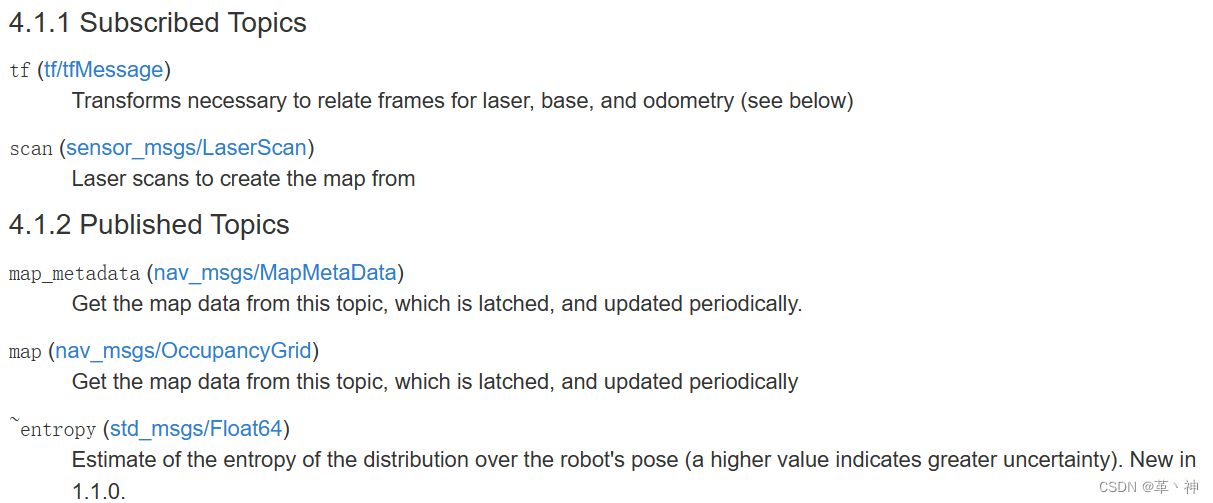
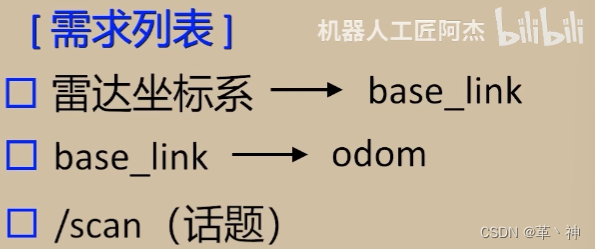
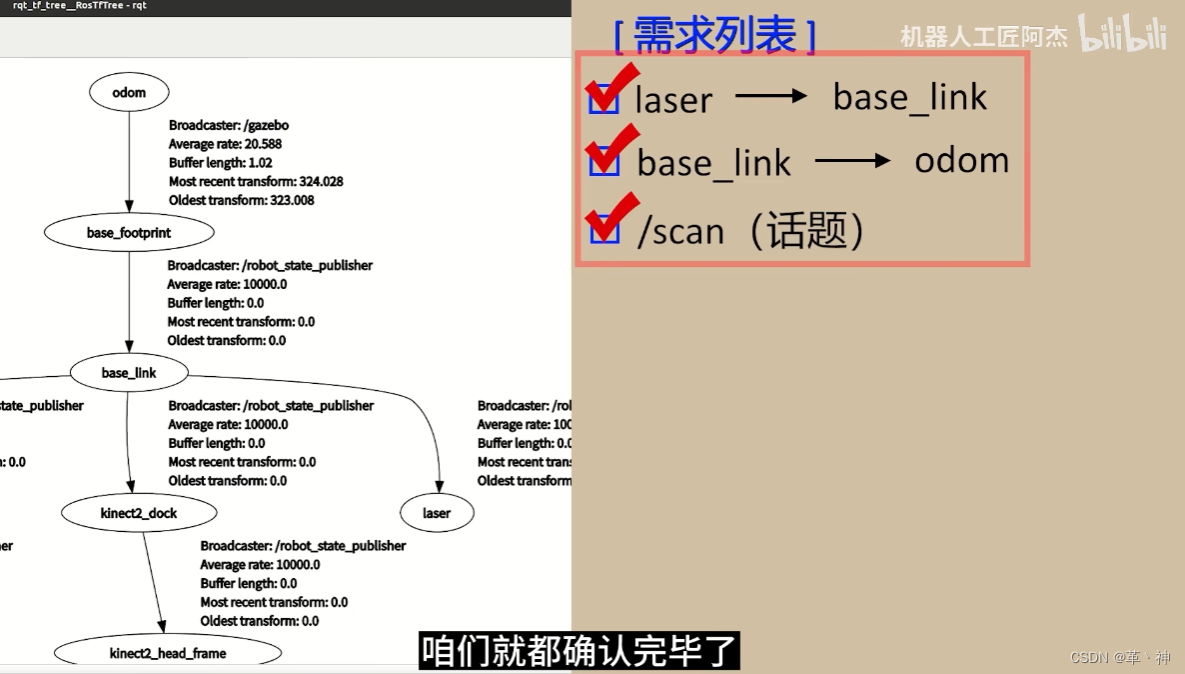
订阅中:必须的tf关系列表


gmapping的输如:
gmapping的输出:
地图的基本信息:地图加载时间,地图分辨率,地图的宽和高,地图的原点坐标
地图的占据栅格地图数据:可以在rviz显示
机器人定位的置信度:越大定位错误可能性越大
map到odom的tf关系
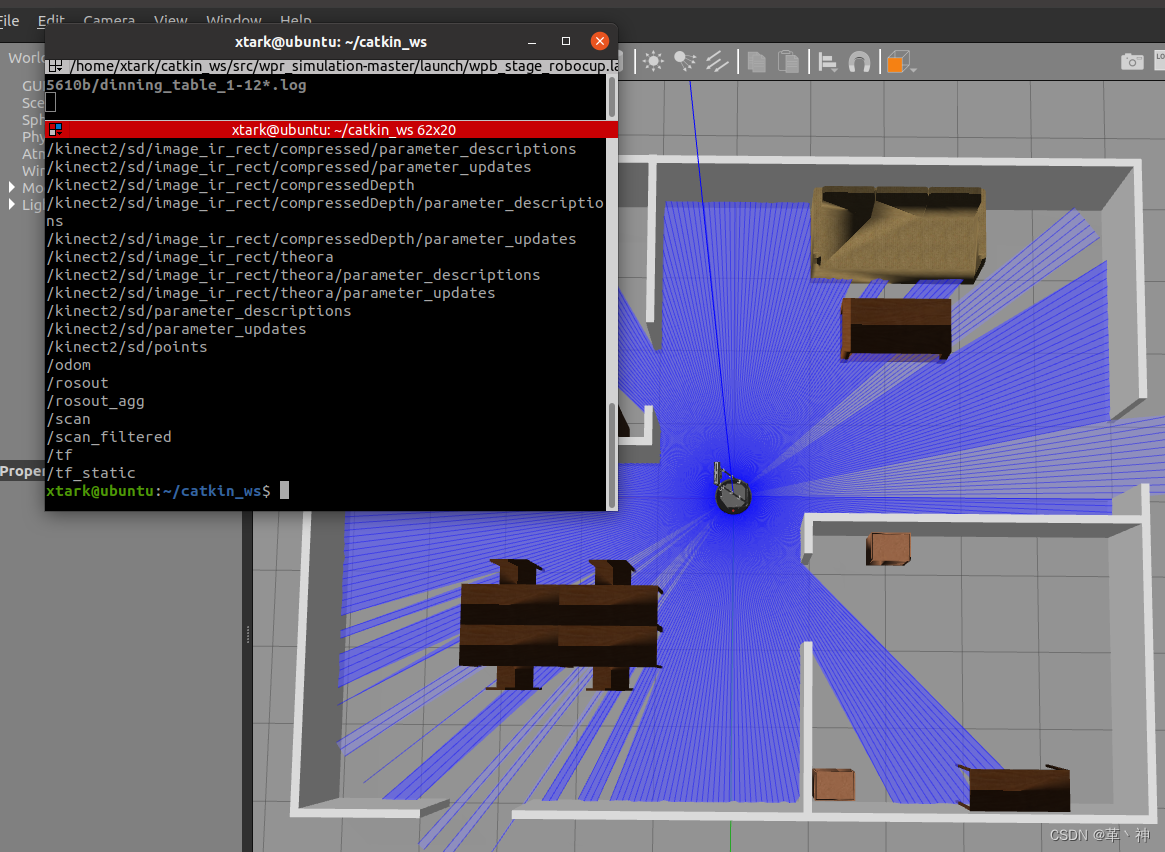
运行大佬给的仿真
//模拟RoboCub@Home家庭服务机器人比赛的一个场景
roslaunch wpr_simulation wpb_stage_robocup.launch
rostopic list
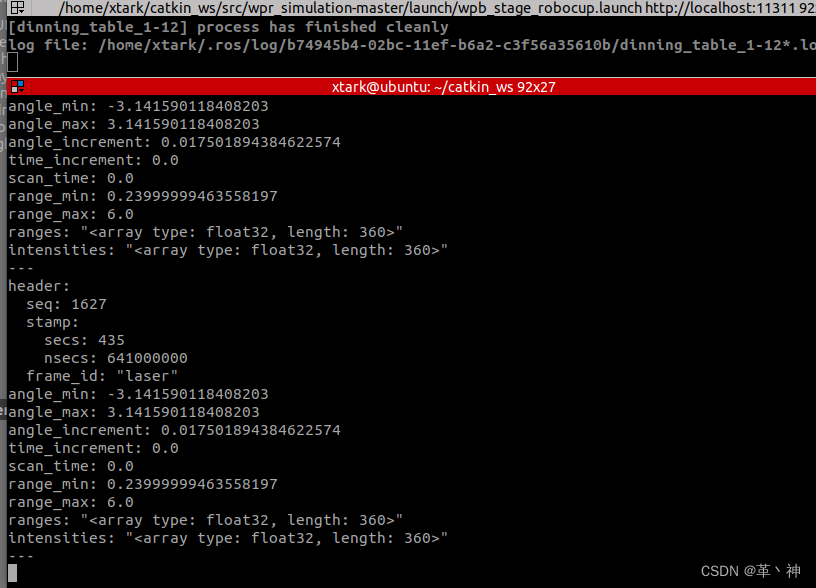
rostopic echo /scan --noarr
rosrun rqt_tf_tree rqt_tf_tree
- 1
- 2
- 3
- 4
- 5
运行Gmapping建图
roslaunch wpr_simulation wpb_stage_robocup.launch
rosrun gmapping slam_gmapping
rviz
rosrun wpr_simulation keyboard_vel_ctrl
- 1
- 2
- 3
- 4
- 5
使用launch运行
<launch>
<!--$(find wpr_simulation) 相当于 ~/catkin_ws/src/wpr_simulation-->
<!--如果在实体机上运行,需要将这个launch文件换成机器人启动的launch文件-->
<include file="$(find wpr_simulation)/launch/wpb_stage_robocup.launch"/>
<node pkg="gmapping" type="slam_gmapping" name ="slam_gmapping">
<param name="map_update_interval" value="0.5"/>
<param name="linearUpdate" value="0.1"/>
</node>
<node pkg="rviz" type="rviz" name ="rviz" args="-d $(find slam_pkg)/rviz/slam.rviz"/>
<node pkg="wpr_simulation" type="keyboard_vel_ctrl" name ="keyboard_vel_ctrl"/>
</launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
Gmapping的参数
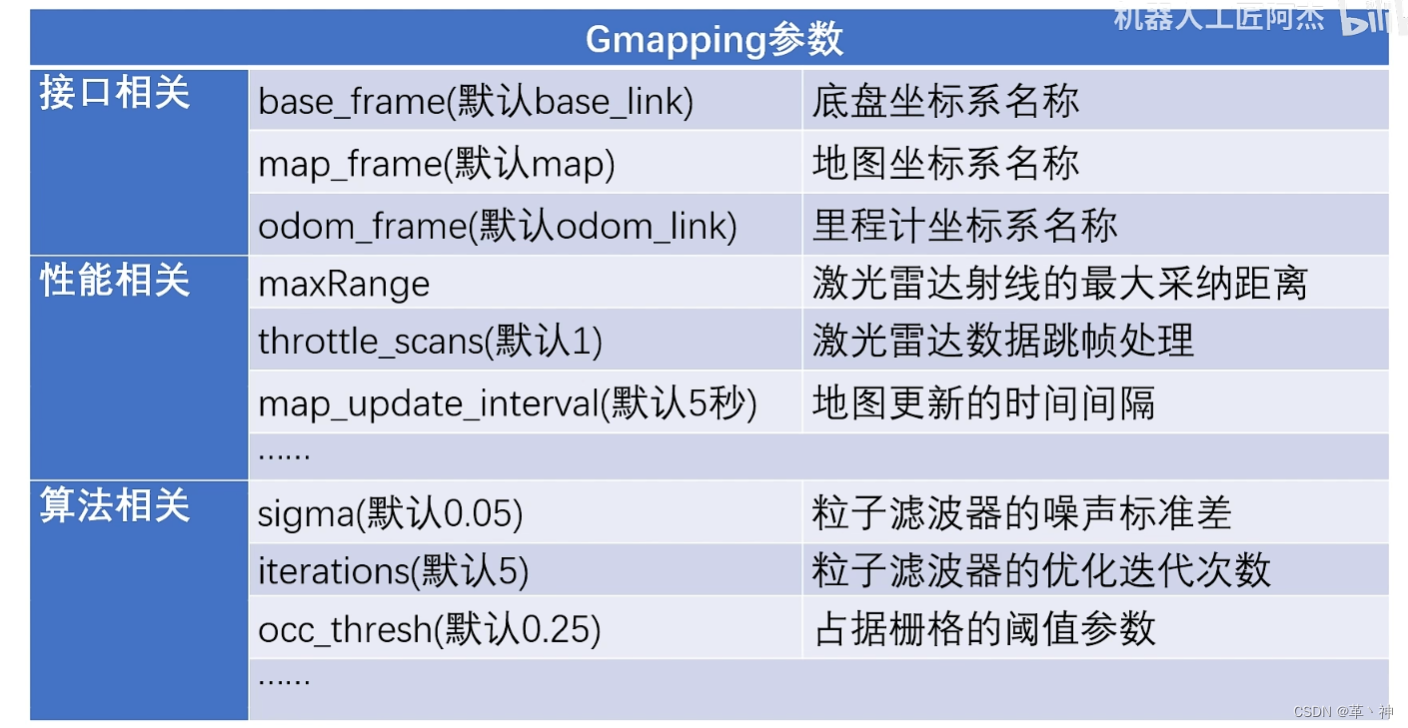
接口相关,可以修改如果tf名称不一样可以进行设置自定义的tf树名称
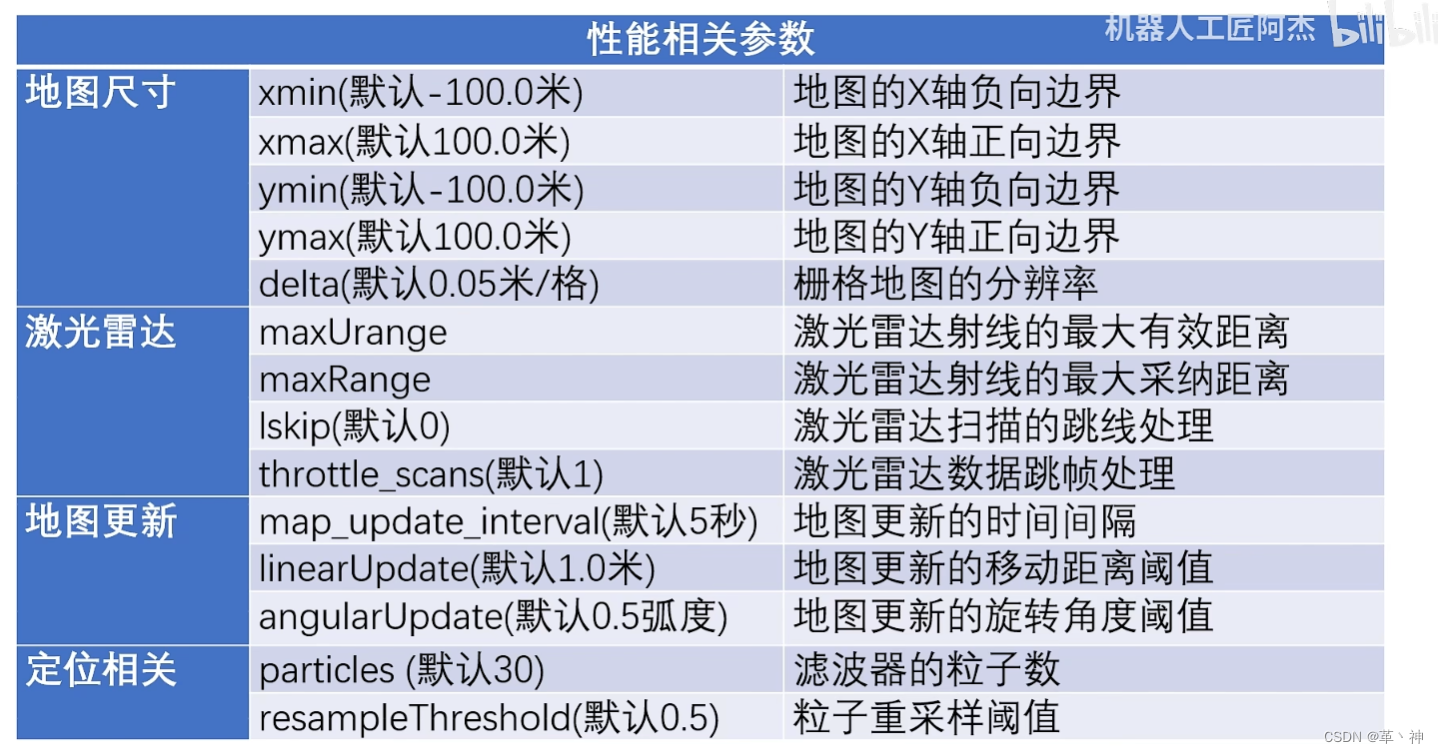
性能参数,可以在树莓派等底算力的设备上运行,只是损失了一些精度(一般调iskip和throttle_scans的值)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小桥流水78/article/detail/805578
推荐阅读
相关标签

