
- 1ofbiz部署异常(一)
- 22023年数维杯C题思路——AI生成文本的智能识别与检测_ai生成文本的智能识别与检测数学模型
- 3毕业设计:基于区块链的物联网设备身份认证与敏感数据访问控制机制设计与实现_区块链数字身份认证论文
- 4一文了解预训练模型 Prompt 调优(比较详细)_prompt优化
- 5大语言模型-基础及拓展应用
- 6微信小程序文件下载及在线打开指定文档,解压Zip格式压缩包_微信小游戏加载的zip包
- 7Linux(CentOs)安装Redis教程_centos redis
- 8Python爬虫教你爬取视频信息_pycharm爬取视频源码
- 9基于YOLO的安全头盔佩戴识别与报警系统及PyQt界面设计(代码和警报仿真)_yolo pyqt
- 10http状态码大全304、201、203等等_203 状态码
自动驾驶AVM环视算法--超广角模式/转向模式/3D碗型投影模式/窄边模式/车轮模式等的实现_3d环视 碗状
赞
踩
opencv310
参考:金书世界
算法源码获取:
链接:链接:https://pan.baidu.com/s/1eYELF2WLLkTJunwXVsWxFg 提取码:k2un
算法的主要实现和运行结果的显示
全功能展示
截图






视频
AVM全景的多视图模式--各功能合集
1、AVM全景的多视图模式--碗型投影任意角度旋转展示
算法的原理:主要是是根据四个相机内外参数拼接图像,并将显示的结果图像投影到3D的碗型投影曲面。
主要的实现代码如下所示
- //设置输出显示的视频分辨率
- IplImage* img_AVM_WAN = cvCreateImage(cvSize(1280, 1440), 8, 3);
- //读取测试图片
- IplImage* img_F = cvLoadImage("Front.png");
- IplImage* img_B = cvLoadImage("Back.png");
- IplImage* img_L = cvLoadImage("Left.png");
- IplImage* img_R = cvLoadImage("Right.png");
- //设置输出视频分辨率和帧率
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\Wan_Angle.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- //定义参数结构体
- js_AVM_obj AVMData_WAN;
- //初始化虚拟相机的角度参数
- AVMData_WAN.A_rx = 120; //[72 114]
- AVMData_WAN.A_ry = 0;//[0 360]
- AVMData_WAN.A_rz = 0;//[-20 20]
- //设置当前的运行步骤
- int stept_index = 0;
- while (1)
- {
- //初始化
- js_init_avm_pic(&AVMData_WAN, img_AVM_WAN->width, img_AVM_WAN->height, 1);
- //运行函数
- js_getAVM_TOP(&AVMData_WAN, img_AVM_WAN->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_WAN->width, img_AVM_WAN->height, img_AVM_WAN->nChannels, 1);
-
- //角度调整实现输出任意角度的视图
- switch (stept_index)
- {
- case 0://x轴
- AVMData_WAN.A_rx = AVMData_WAN.A_rx - 1;
- if (AVMData_WAN.A_rx == 70)
- {
- stept_index = 1;
- AVMData_WAN.A_ry = 0;
- }
- break;
- case 1://y轴
- AVMData_WAN.A_ry = AVMData_WAN.A_ry + 1;
- if (AVMData_WAN.A_ry == 450)
- {
- stept_index = 2;
- AVMData_WAN.A_rx = 90;
- AVMData_WAN.A_rz = -20;
- }
- break;
- case 2://z轴
- AVMData_WAN.A_rz = AVMData_WAN.A_rz + 1;
- if (AVMData_WAN.A_rz == 20)
- {
- stept_index = 3;
- }
- break;
- default:
- break;
- }
- if (stept_index == 3)break;
-
-
- cvShowImage("img", img_AVM_WAN);
-
- cvWriteFrame(writer, img_AVM_WAN);
- cvWaitKey(10);
-
- free(AVMData_WAN.Ftable);
- free(AVMData_WAN.Btable);
- free(AVMData_WAN.Ltable);
- free(AVMData_WAN.Rtable);
-
- }
-
- cvReleaseVideoWriter(&writer);
- cvWaitKey(0);

测试结果视频
AVM全景的多视图模式--碗型投影任意角度旋转展示
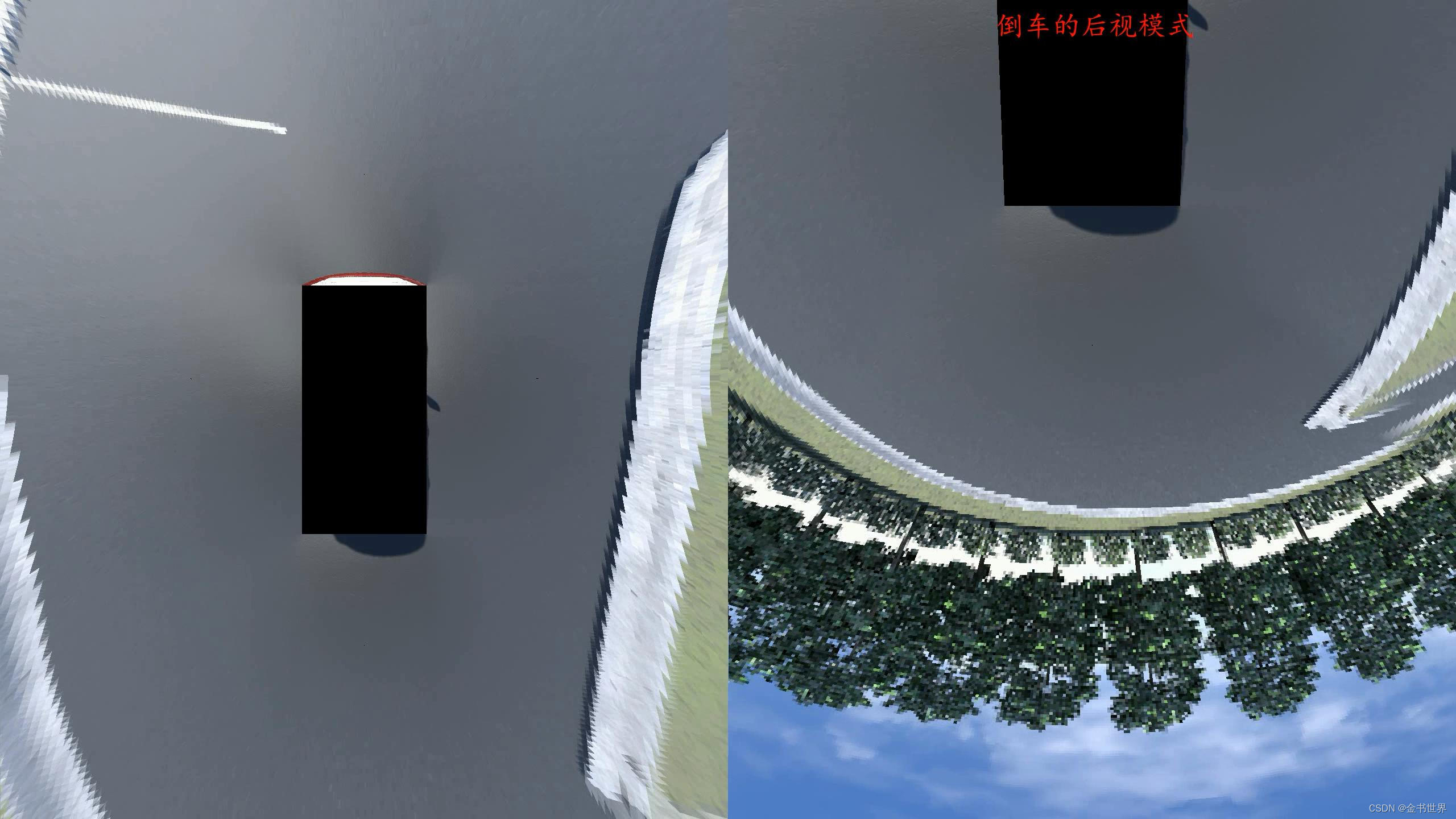
2、AVM全景的后视模式--倒车模式
主要的功能:在启动倒车后输出后视的视图,用观察车辆后方是否安全。
主函数的测试代码
- //设置输出显示的视频分辨率
- IplImage* img_AVM_FBLR = cvCreateImage(cvSize(1280, 1440), 8, 3);
- //设置输出视频分辨率和帧率
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\FBLR_B.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- //读取测试视频
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- //定义参数结构体
- js_AVM_obj AVMData_FBLR;
- //初始化
- js_init_avm_FBLR(&AVMData_FBLR, img_AVM_FBLR->width, img_AVM_FBLR->height, 1);//B
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- //运行函数
- js_getAVM_FBLR(&AVMData_FBLR, img_AVM_FBLR->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_FBLR->width, img_AVM_FBLR->height, img_AVM_FBLR->nChannels, 1);
-
- cvWriteFrame(writer, img_AVM_FBLR);
-
-
- cvShowImage("视频播放", img_AVM_FBLR);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频(由于当前的测试视频不是倒车的视频,所以视频及用于展示视角)
AVM全景的后视模式--倒车模式
3、AVM全景的左转弯模式--左转向模式
主要的功能:在启动转向后输出转向左视的视图,用观察车辆左方是否安全。
主函数的测试代码
- IplImage* img_AVM_FBLR = cvCreateImage(cvSize(1280, 1440), 8, 3);
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\FBLR_L.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_FBLR;
-
- js_init_avm_FBLR(&AVMData_FBLR, img_AVM_FBLR->width, img_AVM_FBLR->height, 2);//L
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_FBLR(&AVMData_FBLR, img_AVM_FBLR->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_FBLR->width, img_AVM_FBLR->height, img_AVM_FBLR->nChannels, 1);
-
- cvWriteFrame(writer, img_AVM_FBLR);
-
-
- cvShowImage("视频播放", img_AVM_FBLR);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的后视模式--左转向模式
4、AVM全景的后视模式--行车模式
主要的功能:在行车状态下的前视的视图,用观察车辆前方是否安全。
主函数的测试代码
- IplImage* img_AVM_FBLR = cvCreateImage(cvSize(1280, 1440), 8, 3);
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\FBLR_F.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_FBLR;
-
- js_init_avm_FBLR(&AVMData_FBLR, img_AVM_FBLR->width, img_AVM_FBLR->height, 0);//F
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_FBLR(&AVMData_FBLR, img_AVM_FBLR->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_FBLR->width, img_AVM_FBLR->height, img_AVM_FBLR->nChannels, 1);
-
- cvWriteFrame(writer, img_AVM_FBLR);
-
-
- cvShowImage("视频播放", img_AVM_FBLR);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的后视模式--行车模式
5、AVM全景的转弯模式--右转模式
主要的功能:在启动转向后输出转向右视的视图,用观察车辆右方是否安全。
主函数的测试代码
- IplImage* img_AVM_FBLR = cvCreateImage(cvSize(1280, 1440), 8, 3);
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\FBLR_R.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_FBLR;
- js_init_avm_FBLR(&AVMData_FBLR, img_AVM_FBLR->width, img_AVM_FBLR->height, 3);//R
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_FBLR(&AVMData_FBLR, img_AVM_FBLR->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_FBLR->width, img_AVM_FBLR->height, img_AVM_FBLR->nChannels, 1);
- cvWriteFrame(writer, img_AVM_FBLR);
-
-
- cvShowImage("视频播放", img_AVM_FBLR);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的转弯模式--右转模式
6、AVM全景的多视角模式--全景俯视模式模式
主要的功能:全景的俯视图主要用于观察车辆周围是否安全和盲区的监测。
主函数的测试代码
- IplImage* img_AVM_TOP = cvCreateImage(cvSize(1280, 1440), 8, 3);
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\TOP.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_TOP;
-
- js_init_avm(&AVMData_TOP, img_AVM_TOP->width, img_AVM_TOP->height, 0);
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_TOP(&AVMData_TOP, img_AVM_TOP->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_TOP->width, img_AVM_TOP->height, img_AVM_TOP->nChannels, 0);
-
- cvWriteFrame(writer, img_AVM_TOP);
-
-
- cvShowImage("视频播放", img_AVM_TOP);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的多视角模式,全景俯视模式模式
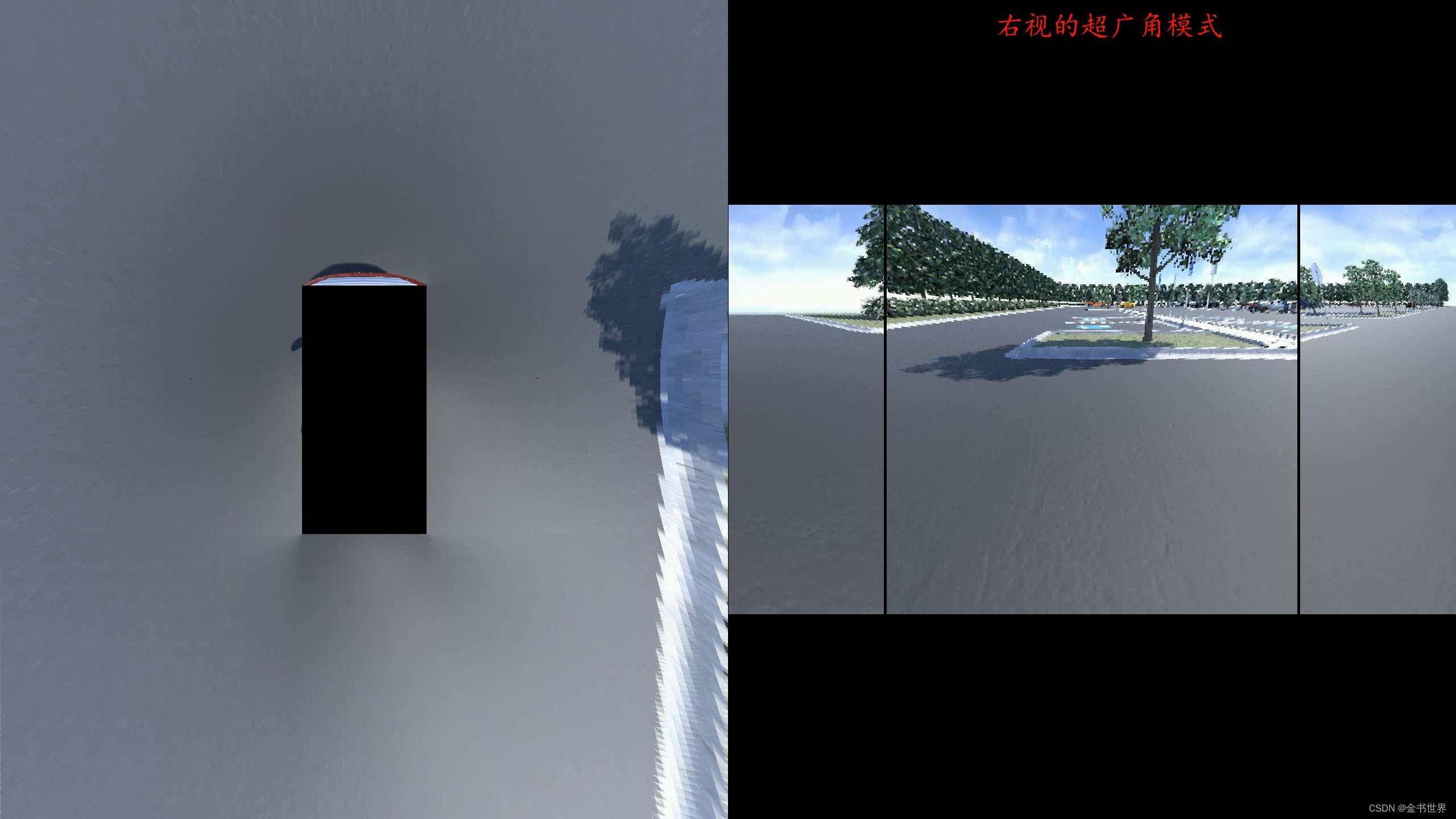
7、AVM全景的超广角模式--右视超广角模式(当前拼接位置对齐存在问题,暂未解决)
主要的功能:超广角就是用观察正前方和左右两侧是否存在快速接近的物体,主要是视角大可以近视看到180度的视角。
主函数的测试代码
- IplImage* img_AVM_WideAngle = cvCreateImage(cvSize(1280, 720), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\WideAngle_R.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 720));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_WideAngle;
- js_init_avm_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->width, img_AVM_WideAngle->height, 1, 0);//0:F 1:B
-
-
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_WideAngle->width, img_AVM_WideAngle->height, img_AVM_WideAngle->nChannels, 1, 0);
-
- cvLine(img_AVM_WideAngle, cvPoint(276, 0), cvPoint(276, 720), CV_RGB(0, 0, 0), 3);
- cvLine(img_AVM_WideAngle, cvPoint(1003, 0), cvPoint(1003, 720), CV_RGB(0, 0, 0), 3);
-
- cvWriteFrame(writer, img_AVM_WideAngle);
-
-
- cvShowImage("视频播放", img_AVM_WideAngle);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的超广角模式--右视超广角模式
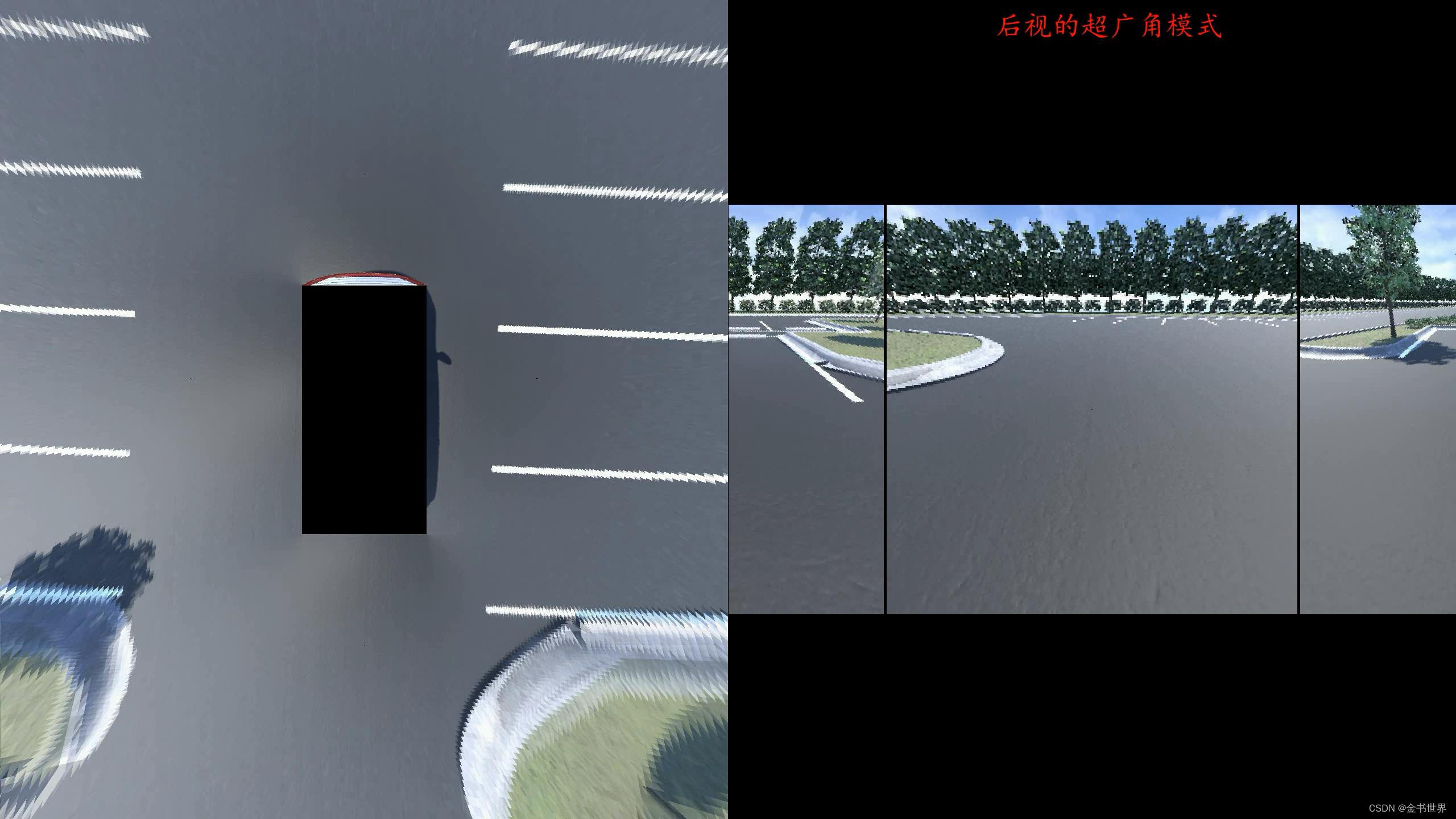
8、AVM全景的超广角模式--后视超广角模式(当前拼接位置对齐存在问题,暂未解决)
主要的功能:超广角就是用观察正前方和左右两侧是否存在快速接近的物体,主要是视角大可以近视看到180度的视角。
主函数的测试代码
- IplImage* img_AVM_WideAngle = cvCreateImage(cvSize(1280, 720), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\WideAngle_B.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 720));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_WideAngle;
- js_init_avm_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->width, img_AVM_WideAngle->height, 1, 0);//0:F 1:B
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->imageData, img_B->imageData,img_F->width, img_F->height, img_AVM_WideAngle->width, img_AVM_WideAngle->height, img_AVM_WideAngle->nChannels, 1, 0);
-
- cvLine(img_AVM_WideAngle, cvPoint(276, 0), cvPoint(276, 720), CV_RGB(0, 0, 0), 3);
- cvLine(img_AVM_WideAngle, cvPoint(1003, 0), cvPoint(1003, 720), CV_RGB(0, 0, 0), 3);
-
- cvWriteFrame(writer, img_AVM_WideAngle);
-
-
- cvShowImage("视频播放", img_AVM_WideAngle);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的超广角模式--后视超广角模式
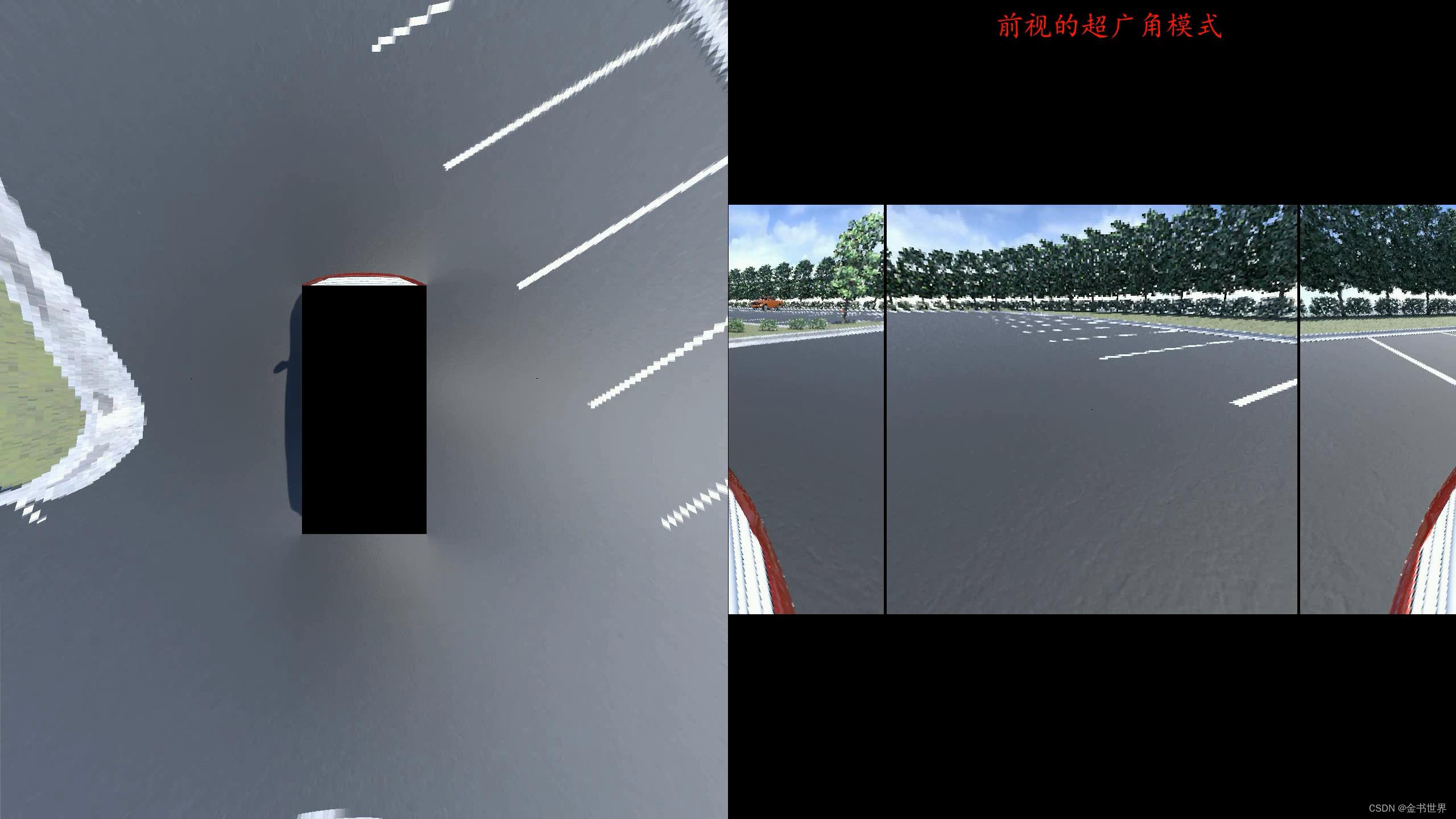
9、AVM全景的超广角模式--前视超广角模式(当前拼接位置对齐存在问题,暂未解决)
主要的功能:超广角就是用观察正前方和左右两侧是否存在快速接近的物体,主要是视角大可以近视看到180度的视角。
主函数的测试代码
- IplImage* img_AVM_WideAngle = cvCreateImage(cvSize(1280, 720), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\WideAngle_F.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 720));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, *img_B, *img_L, *img_R;
- js_AVM_obj AVMData_WideAngle;
- js_init_avm_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->width, img_AVM_WideAngle->height, 1,0);//0:F 1:B
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
-
- js_getAVM_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->imageData, img_F->imageData, img_F->width, img_F->height, img_AVM_WideAngle->width, img_AVM_WideAngle->height, img_AVM_WideAngle->nChannels, 1, 0);
-
- cvLine(img_AVM_WideAngle, cvPoint(276, 0), cvPoint(276, 720), CV_RGB(0, 0, 0), 3);
- cvLine(img_AVM_WideAngle, cvPoint(1003, 0), cvPoint(1003, 720), CV_RGB(0, 0, 0), 3);
-
- cvWriteFrame(writer, img_AVM_WideAngle);
-
-
- cvShowImage("视频播放", img_AVM_WideAngle);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的超广角模式--前视超广角模式
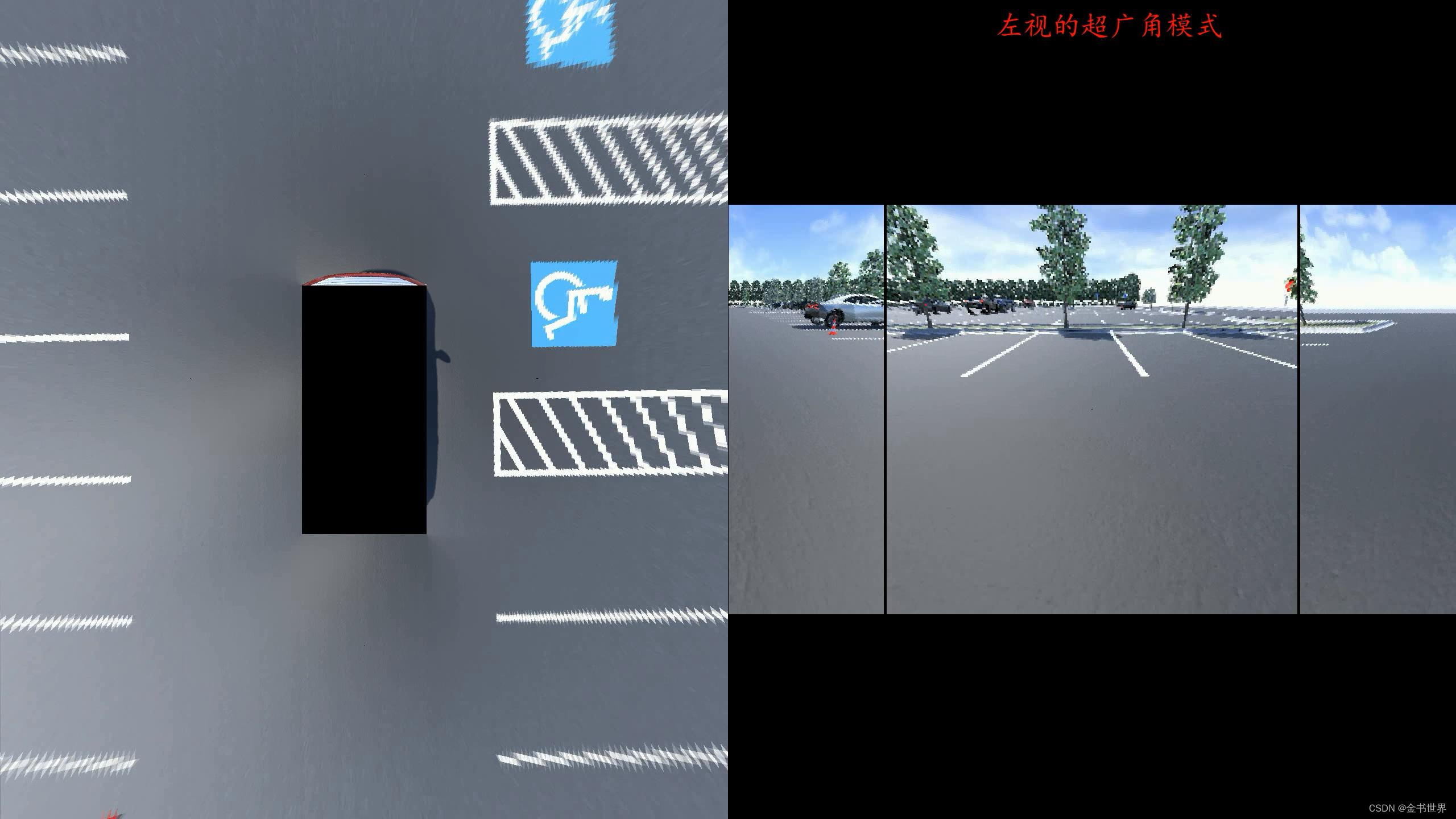
10、AVM全景的超广角模式--左视超广角模式(当前拼接位置对齐存在问题,暂未解决)
主要的功能:超广角就是用观察正前方和左右两侧是否存在快速接近的物体,主要是视角大可以近视看到180度的视角。
主函数的测试代码
- IplImage* img_AVM_WideAngle = cvCreateImage(cvSize(1280, 720), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\WideAngle_L.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 720));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_WideAngle;
-
- js_init_avm_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->width, img_AVM_WideAngle->height, 1, 0);//0:F 1:B
-
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_WideAngle(&AVMData_WideAngle, img_AVM_WideAngle->imageData, img_L->imageData, img_F->width, img_F->height, img_AVM_WideAngle->width, img_AVM_WideAngle->height, img_AVM_WideAngle->nChannels, 1, 0);
-
- cvLine(img_AVM_WideAngle, cvPoint(276, 0), cvPoint(276, 720), CV_RGB(0, 0, 0), 3);
- cvLine(img_AVM_WideAngle, cvPoint(1003, 0), cvPoint(1003, 720), CV_RGB(0, 0, 0), 3);
-
- cvWriteFrame(writer, img_AVM_WideAngle);
-
-
- cvShowImage("视频播放", img_AVM_WideAngle);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的超广角模式--左视超广角模式
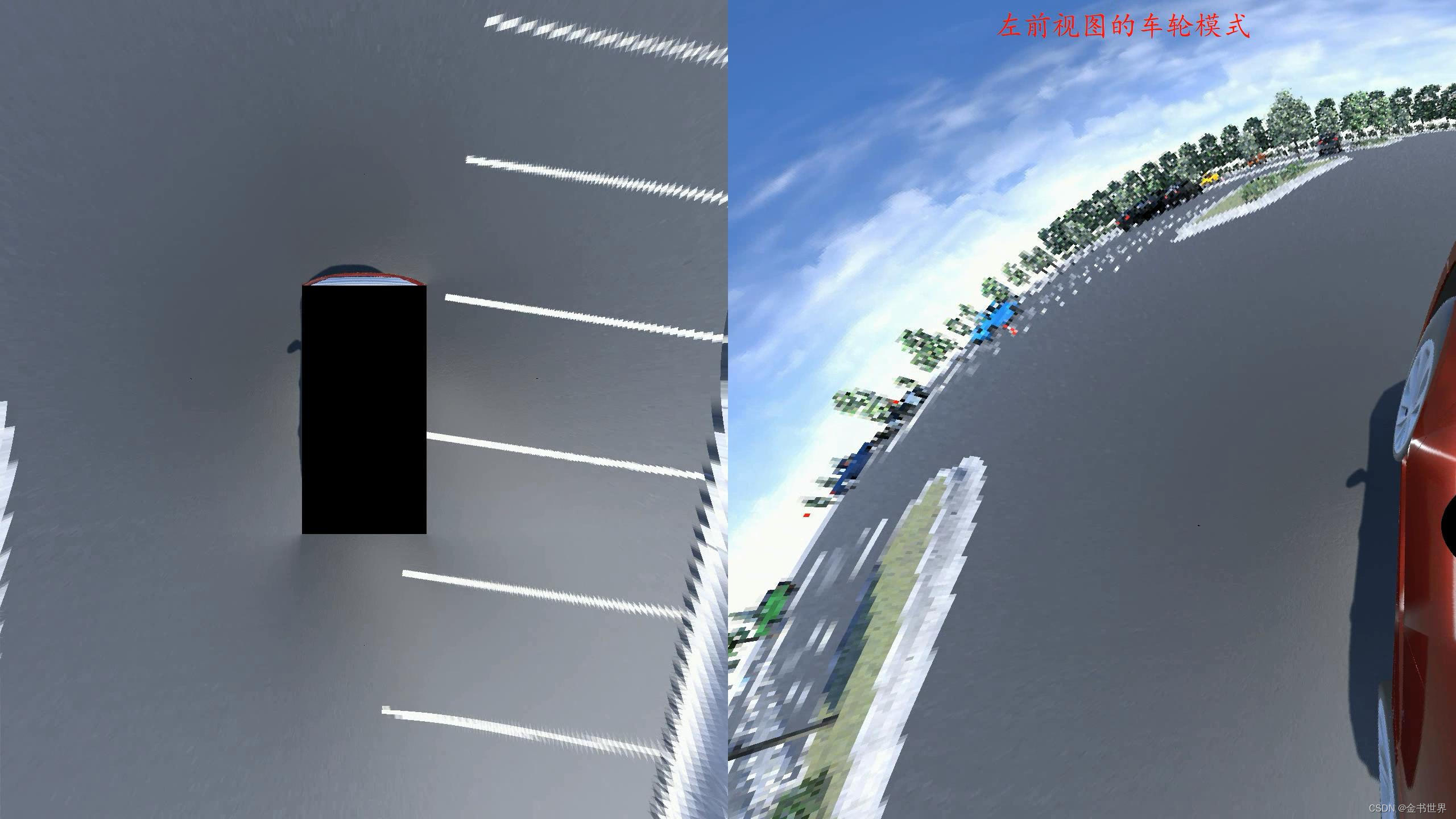
11、AVM全景的车轮模式--行车左前车轮模式
主要的功能:在行车状态是左转时用于观察车辆左侧的近处是否存在刮碰车辆的风险。
主函数的测试代码
- IplImage* img_AVM_Wheel = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\Wheel_FL.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_Wheel;
-
- js_init_avm_Wheel(&AVMData_Wheel, img_AVM_Wheel->width, img_AVM_Wheel->height,0);//FL:0 FR:1 BL:2 BR:3
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_Wheel(&AVMData_Wheel, img_AVM_Wheel->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_Wheel->width, img_AVM_Wheel->height, img_AVM_Wheel->nChannels, 1,0);
-
- cvWriteFrame(writer, img_AVM_Wheel);
-
-
- cvShowImage("视频播放", img_AVM_Wheel);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的车轮模式--行车左前车轮模式
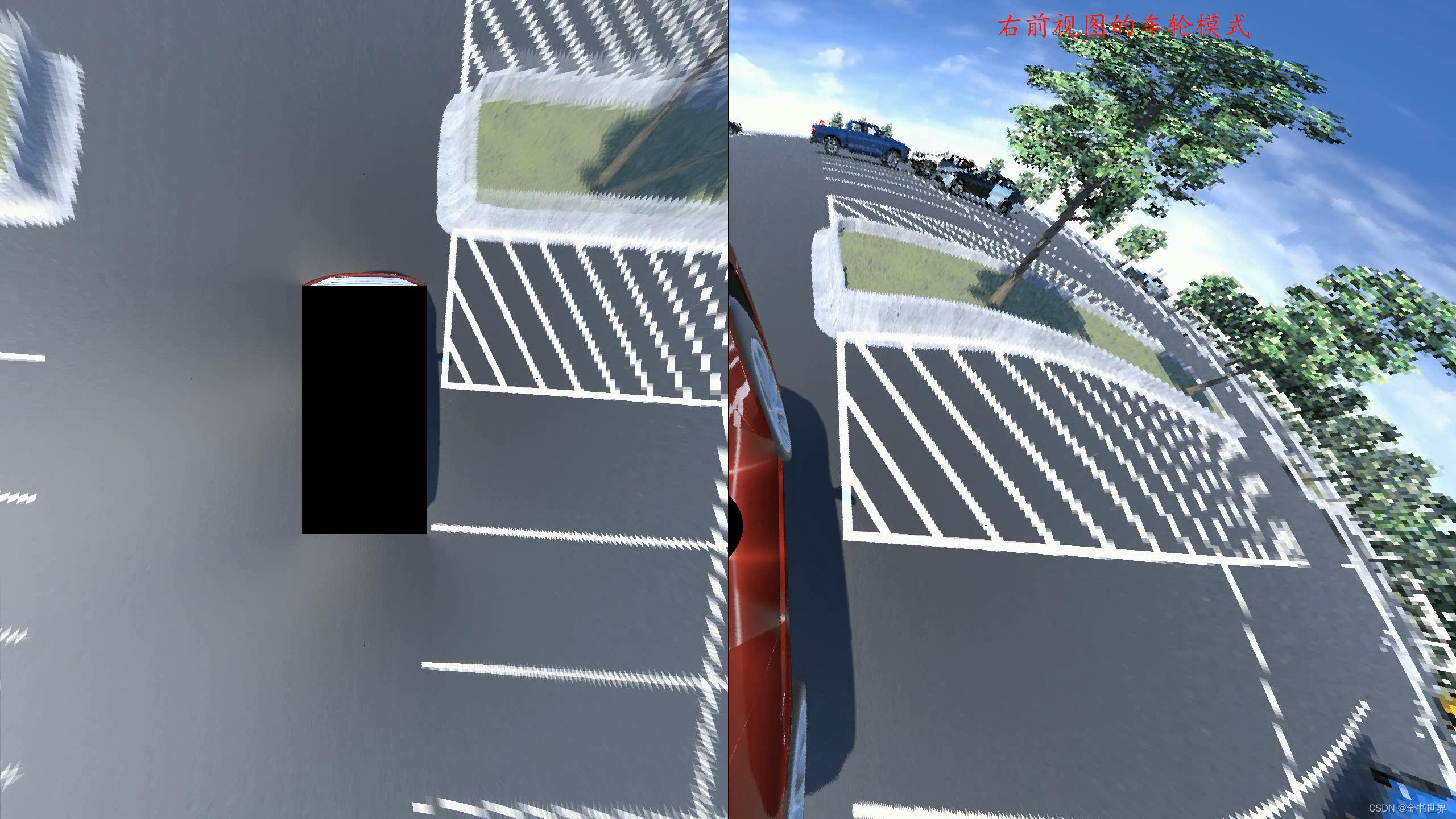
12、AVM全景的车轮模式--行车右前车轮模式
主要的功能:在行车状态是右转时用于观察车辆右侧的近处是否存在刮碰车辆的风险。
主函数的测试代码
- IplImage* img_AVM_Wheel = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\Wheel_FR.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_Wheel;
-
- js_init_avm_Wheel(&AVMData_Wheel, img_AVM_Wheel->width, img_AVM_Wheel->height, 1);//FL:0 FR:1 BL:2 BR:3
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_Wheel(&AVMData_Wheel, img_AVM_Wheel->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_Wheel->width, img_AVM_Wheel->height, img_AVM_Wheel->nChannels, 1, 1);
-
- cvWriteFrame(writer, img_AVM_Wheel);
-
-
- cvShowImage("视频播放", img_AVM_Wheel);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的车轮模式--行车右前车轮模式
13、AVM全景的车轮模式--倒车右后车轮模式
主要的功能:在倒车状态是左转时用于观察车辆左侧的近处是否存在刮碰车辆的风险。
主函数的测试代码
- IplImage* img_AVM_Wheel = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\Wheel_BR.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_Wheel;
-
- js_init_avm_Wheel(&AVMData_Wheel, img_AVM_Wheel->width, img_AVM_Wheel->height, 3);//FL:0 FR:1 BL:2 BR:3
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_Wheel(&AVMData_Wheel, img_AVM_Wheel->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_Wheel->width, img_AVM_Wheel->height, img_AVM_Wheel->nChannels, 1, 3);
- cvWriteFrame(writer, img_AVM_Wheel);
-
-
- cvShowImage("视频播放", img_AVM_Wheel);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的车轮模式--倒车右后车轮模式
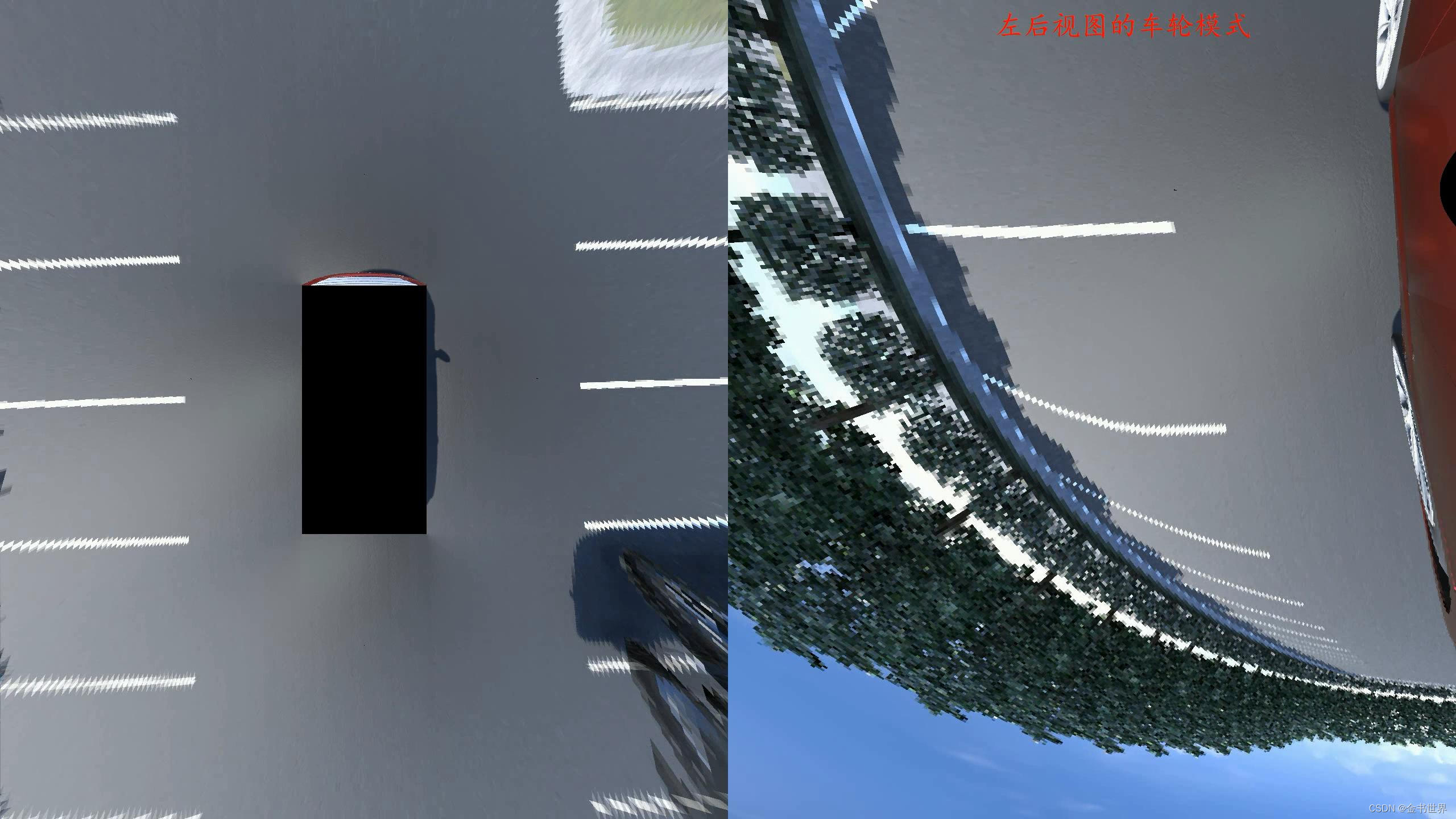
14、AVM全景的车轮模式--倒车左后车轮模式
主要的功能:在到车状态是右转时用于观察车辆右侧的近处是否存在刮碰车辆的风险。
主函数的测试代码
- IplImage* img_AVM_Wheel = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\Wheel_BL.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_Wheel;
-
- js_init_avm_Wheel(&AVMData_Wheel, img_AVM_Wheel->width, img_AVM_Wheel->height, 2);//FL:0 FR:1 BL:2 BR:3
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_Wheel(&AVMData_Wheel, img_AVM_Wheel->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_Wheel->width, img_AVM_Wheel->height, img_AVM_Wheel->nChannels, 1, 2);
-
-
- cvWriteFrame(writer, img_AVM_Wheel);
-
-
- cvShowImage("视频播放", img_AVM_Wheel);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的车轮模式--倒车左后车轮模式
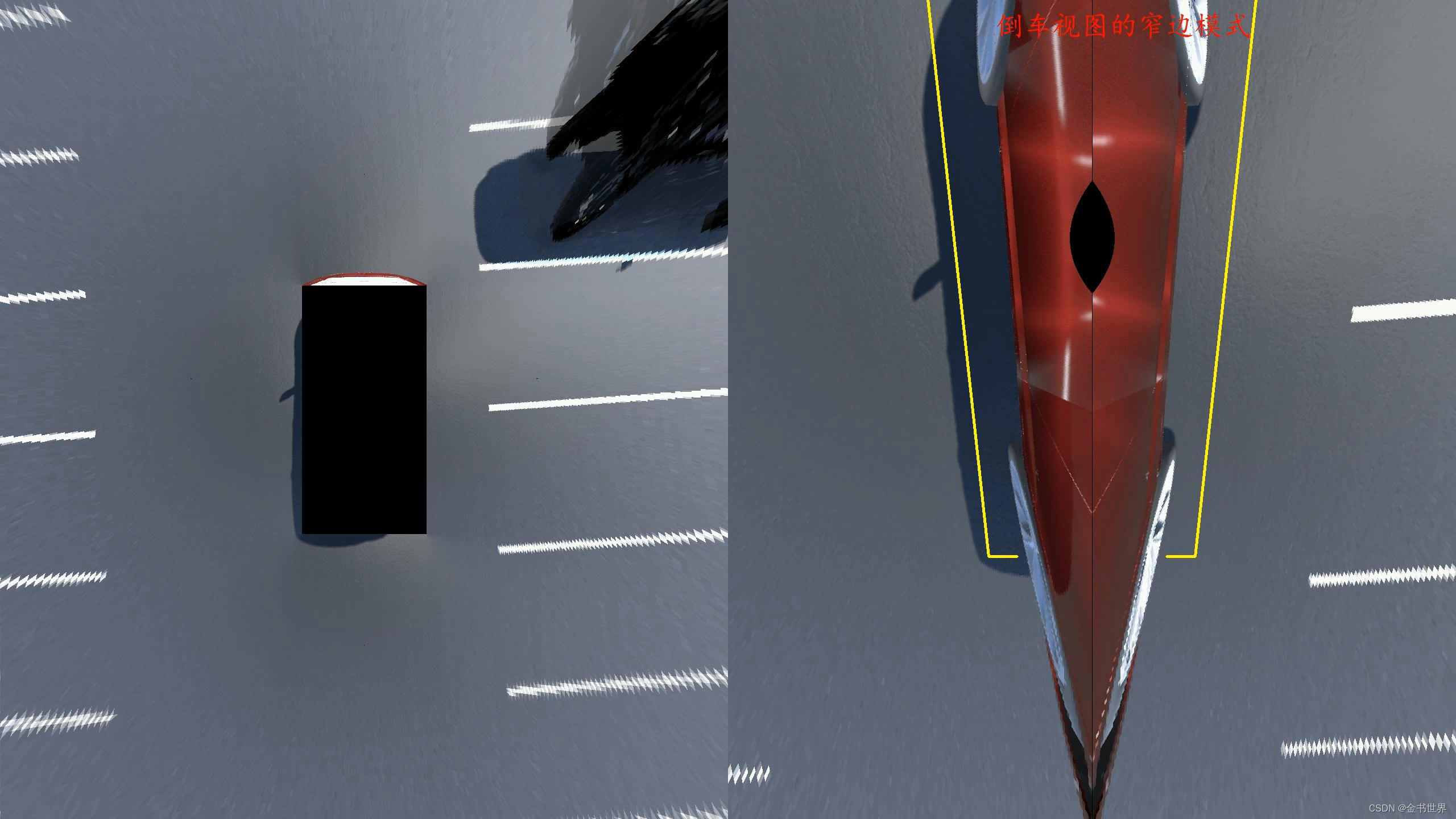
15、AVM全景的窄边模式--倒车窄边模式
主要的功能:在倒车时通过比较窄的路段用于观察车辆两侧是否安全。
主函数的测试代码
- IplImage* img_AVM_NarrowEdge = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\NarrowEdge_B.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_NarrowEdge;
-
- js_init_avm_NarrowEdge(&AVMData_NarrowEdge, img_AVM_NarrowEdge->width, img_AVM_NarrowEdge->height, 1);//0F
-
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_NarrowEdge(&AVMData_NarrowEdge, img_AVM_NarrowEdge->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_NarrowEdge->width, img_AVM_NarrowEdge->height, img_AVM_NarrowEdge->nChannels, 0);
-
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.LFsrc.x, AVMData_NarrowEdge.LFsrc.y), cvPoint(AVMData_NarrowEdge.LBsrc.x, AVMData_NarrowEdge.LBsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.RFsrc.x, AVMData_NarrowEdge.RFsrc.y), cvPoint(AVMData_NarrowEdge.RBsrc.x, AVMData_NarrowEdge.RBsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.LBsrc.x, AVMData_NarrowEdge.LBsrc.y), cvPoint(AVMData_NarrowEdge.LBsrc.x + 50, AVMData_NarrowEdge.LBsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.RBsrc.x - 50, AVMData_NarrowEdge.RBsrc.y), cvPoint(AVMData_NarrowEdge.RBsrc.x, AVMData_NarrowEdge.RBsrc.y), CV_RGB(255, 255, 0), 3);
-
-
- cvWriteFrame(writer, img_AVM_NarrowEdge);
-
-
- cvShowImage("视频播放", img_AVM_NarrowEdge);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的窄边模式--倒车窄边模式
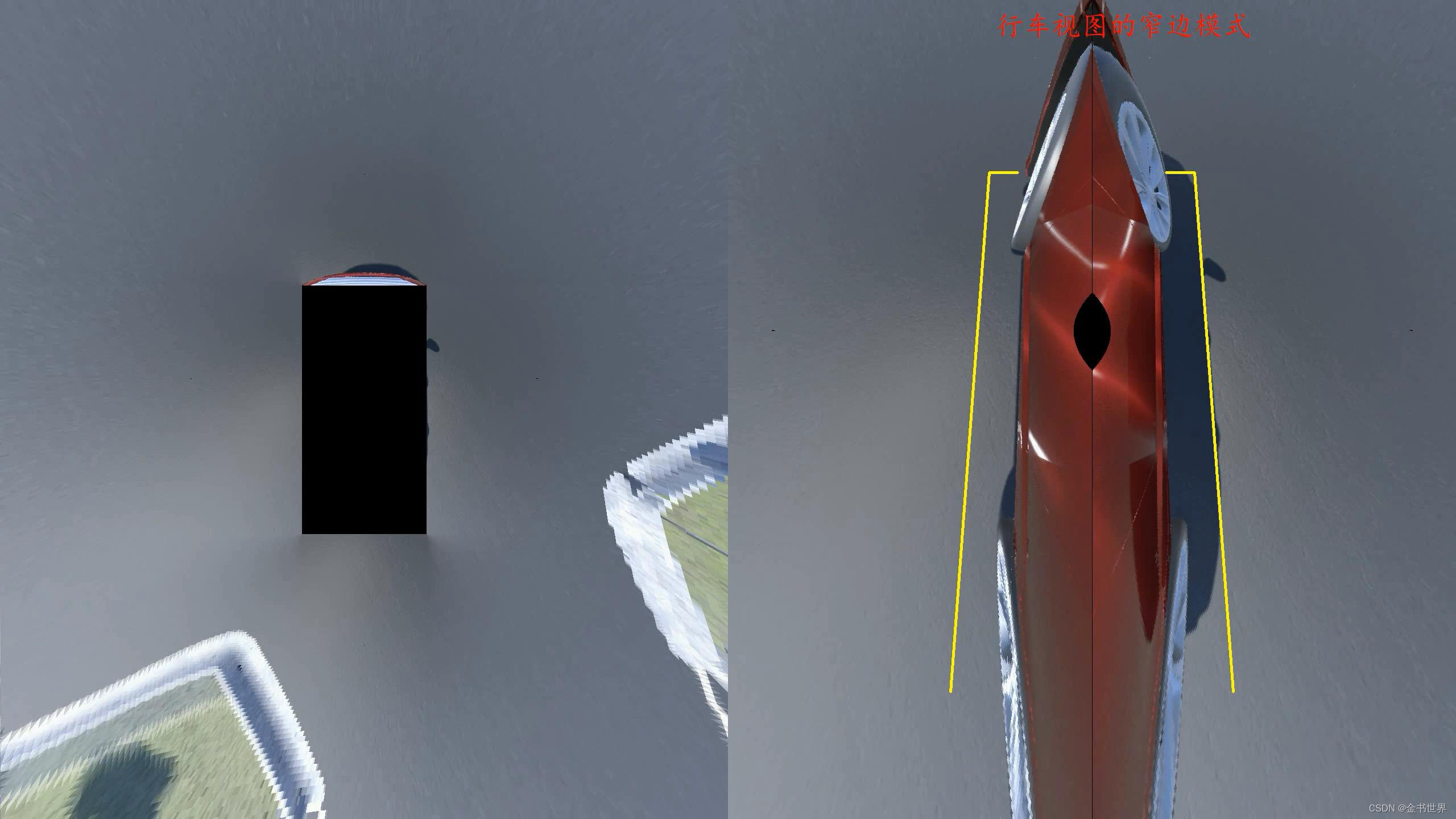
16、AVM全景的窄边模式--行车窄边模式
主要的功能:在行车时通过比较窄的路段用于观察车辆两侧是否安全。
主函数的测试代码
- IplImage* img_AVM_NarrowEdge = cvCreateImage(cvSize(1280, 1440), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video1\\NarrowEdge_F.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video1\\Right.avi");
- IplImage* img_F, * img_B, * img_L, * img_R;
- js_AVM_obj AVMData_NarrowEdge;
-
- js_init_avm_NarrowEdge(&AVMData_NarrowEdge, img_AVM_NarrowEdge->width, img_AVM_NarrowEdge->height,0);//0F
- img_F = cvQueryFrame(C_img_F);
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- int num = 0;
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_NarrowEdge(&AVMData_NarrowEdge, img_AVM_NarrowEdge->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM_NarrowEdge->width, img_AVM_NarrowEdge->height, img_AVM_NarrowEdge->nChannels, 0);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.LFsrc.x, AVMData_NarrowEdge.LFsrc.y), cvPoint(AVMData_NarrowEdge.LBsrc.x, AVMData_NarrowEdge.LBsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.RFsrc.x, AVMData_NarrowEdge.RFsrc.y), cvPoint(AVMData_NarrowEdge.RBsrc.x, AVMData_NarrowEdge.RBsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.LFsrc.x, AVMData_NarrowEdge.LFsrc.y), cvPoint(AVMData_NarrowEdge.LFsrc.x+ 50, AVMData_NarrowEdge.LFsrc.y), CV_RGB(255, 255, 0), 3);
- cvLine(img_AVM_NarrowEdge, cvPoint(AVMData_NarrowEdge.RFsrc.x-50, AVMData_NarrowEdge.RFsrc.y), cvPoint(AVMData_NarrowEdge.RFsrc.x, AVMData_NarrowEdge.RFsrc.y), CV_RGB(255, 255, 0), 3);
-
-
- cvWriteFrame(writer, img_AVM_NarrowEdge);
-
-
- cvShowImage("视频播放", img_AVM_NarrowEdge);
- char c = cvWaitKey(1);
- if (c == 27)break;
- num++;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试结果视频
AVM全景的窄边模式--行车窄边模式


