
- 1大数据知识点总结_大数据总结
- 2小生意赚钱小妙招,包括自媒体如何出爆款!_微商怎么做
- 3在 CentOS 7 上安装 Docker 并安装和部署 .NET Core 3.1_centos7安装docker
- 4LangChain 工程架构解析_langchain框架解析
- 5windows 显示苹果分区_让你的联想电脑也可以用上苹果系统
- 6python turtle绕原点旋转_「加德老师与小朋友们的编程之旅」Python海龟作图(上)
- 7数据分析软件之SPSS、Stata、Matlab_spss和stata
- 8测试用例编写规范
- 9python语言与c语言编写的程序文件的后缀名分别是什么_C语言中的源程序文件和目标文件的扩展名分别是...
- 10【在FastAPI应用中嵌入Gradio界面的实现方法】如何在有一个Fastapi应用的基础上,新加一个gradio程序_gradio fastapi
特征匹配及其优化_特征点匹配如何优化
赞
踩
N本文转载http://www.cnblogs.com/wangguchangqing/p/4333873.html
在OpenCV2简单的特征匹配中对使用OpenCV2进行特征匹配的步骤做了一个简单的介绍,其匹配出的结果是非常粗糙的,在这篇文章中对使用OpenCV2进行匹配的细化做一个简单的总结。主要包括以下几个内容:
DescriptorMatcher
DMatcher KNN匹配
计算两视图的基础矩阵F,并细化匹配结果
计算两视图的单应矩阵H,并细化匹配结果
DescriptorMatcher 和 DMatcher
DescriptorMatcher是匹配特征向量的抽象类,在OpenCV2中的特征匹配方法都继承自该类(例如:BFmatcher,FlannBasedMatcher)。该类主要包含了两组匹配方法:图像对之间的匹配以及图像和一个图像集之间的匹配。
OpenCV提供了两种算法实现了匹配:
Brute-force matcher就是用暴力方法找到点集一中每个descriptor在点集二中距离最近的 descriptor;
Flann-based matcher 使用快速近似最近邻搜索算法寻找。 使用于Sift和SURF,不能用在ORB中。
为了提高检测速度,你可以调用matching函数前,先训练一个matcher。训练过程可以首先使用cv:: FlannBasedMatcher来优化,为 descriptor建立索引树,这种操作将在匹配大量数据时发挥巨大作用(比如在上百幅图像的数据集中查找匹配图像)。而 Brute-force matcher在这个过程并不进行操作,它只是将train descriptors保存在内存中。
用于图像对之间匹配的方法的声明
// Find one best match for each query descriptor (if mask is empty).
CV_WRAP void match( const Mat& queryDescriptors, const Mat& trainDescriptors,
CV_OUT vector<DMatch>& matches, const Mat& mask=Mat() ) const;
// Find k best matches for each query descriptor (in increasing order of distances).
// compactResult is used when mask is not empty. If compactResult is false matches
// vector will have the same size as queryDescriptors rows. If compactResult is true
// matches vector will not contain matches for fully masked out query descriptors.
CV_WRAP void knnMatch( const Mat& queryDescriptors, const Mat& trainDescriptors,
CV_OUT vector<vector<DMatch> >& matches, int k,
const Mat& mask=Mat(), bool compactResult=false ) const;
// Find best matches for each query descriptor which have distance less than
// maxDistance (in increasing order of distances).
void radiusMatch( const Mat& queryDescriptors, const Mat& trainDescriptors,
vector<vector<DMatch> >& matches, float maxDistance,
const Mat& mask=Mat(), bool compactResult=false ) const;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
方法重载,用于图像和图像集匹配的方法声明
CV_WRAP void match( const Mat& queryDescriptors, CV_OUT vector<DMatch>& matches,
const vector<Mat>& masks=vector<Mat>() );
CV_WRAP void knnMatch( const Mat& queryDescriptors, CV_OUT vector<vector<DMatch> >& matches, int k,
const vector<Mat>& masks=vector<Mat>(), bool compactResult=false );
void radiusMatch( const Mat& queryDescriptors, vector<vector<DMatch> >& matches, float maxDistance,
const vector<Mat>& masks=vector<Mat>(), bool compactResult=false );- 1
- 2
- 3
- 4
- 5
- 6
DMatcher 是用来保存匹配结果的,主要有以下几个属性
CV_PROP_RW int queryIdx; // query descriptor index
CV_PROP_RW int trainIdx; // train descriptor index
CV_PROP_RW int imgIdx; // train image index
CV_PROP_RW float distance;- 1
- 2
- 3
- 4
在图像匹配时有两种图像的集合,查找集(Query Set)和训练集(Train Set),对于每个Query descriptor,DMatch中保存了和其最好匹配的Train descriptor。另外,每个train image会生成多个train descriptor。
如果是图像对之间的匹配的话,由于所有的train descriptor都是由一个train image生成的,所以在匹配结果DMatch中所有的imgIdx是一样的,都为0.
KNNMatch
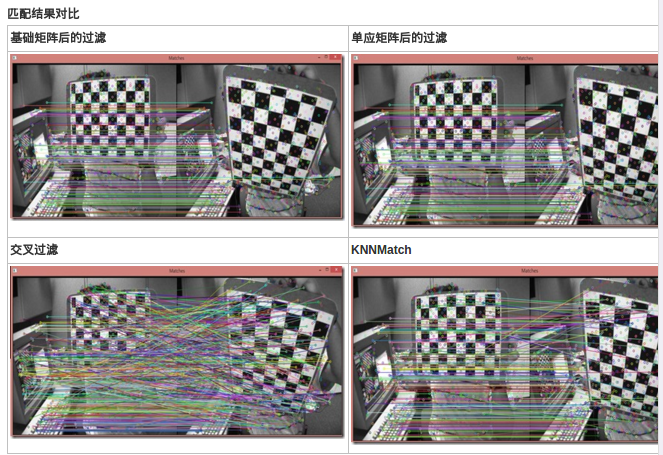
匹配过程中很可能发生错误的匹配,错误的匹配主要有两种:匹配的特征点是错误的,图像上的特征点无法匹配。常用的删除错误的匹配有
交叉过滤
如果第一幅图像的一个特征点和第二幅图像的一个特征点相匹配,则进行一个相反的检查,即将第二幅图像上的特征点与第一幅图像上相应特征点进行匹配,如果匹配成功,则认为这对匹配是正确的。
OpenCV中的BFMatcher已经包含了这种过滤 BFMatcher matcher(NORM_L2,true),在构造BFMatcher是将第二个参数设置为true。比率测试 KNNMatch,可设置K = 2
,即对每个匹配返回两个最近邻描述符,仅当第一个匹配与第二个匹配之间的距离足够小时,才认为这是一个匹配。
在抽象基类DescriptorMatcher中封装了knnMatch方法,具体使用方法如下:
void FeatureMatchTest::knnMatch(vector<DMatch>& matches) {
const float minRatio = 1.f / 1.5f;
const int k = 2;
vector<vector<DMatch>> knnMatches;
matcher->knnMatch(leftPattern->descriptors, rightPattern->descriptors, knnMatches, k);
for (size_t i = 0; i < knnMatches.size(); i++) {
const DMatch& bestMatch = knnMatches[i][0];
const DMatch& betterMatch = knnMatches[i][1];
float distanceRatio = bestMatch.distance / betterMatch.distance;
if (distanceRatio < minRatio)
matches.push_back(bestMatch);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
RANSAC方法计算基础矩阵,并细化匹配结果
如果已经知道了两视图(图像)间的多个点的匹配,就可以进行基础矩阵F的计算了。OpenCV2中可以使用findFundamentalMat方法,其声明如下:
//! finds fundamental matrix from a set of corresponding 2D points
CV_EXPORTS_W Mat findFundamentalMat( InputArray points1, InputArray points2,
int method=FM_RANSAC,
double param1=3., double param2=0.99,
OutputArray mask=noArray());
参数说明:
points1,points2 两幅图像间相匹配的点,点的坐标要是浮点数(float或者double)
第三个参数method是用来计算基础矩阵的具体方法,是一个枚举值。
param1,param2保持默认值即可。
主要来说下mask参数,有N个匹配点用来计算基础矩阵,则该值有N个元素,每个元素的值为0或者1.值为0时,代表该匹配点是错误的匹配(离群值),只在使用RANSAC和LMeds方法时该值有效,
可以使用该值来删除错误的匹配。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
另外,在匹配完成后使用得到的匹配点来计算基础矩阵时,首先需要将特征点对齐,并且将特征点转换为2D点,具体实现如下:
//Align all points
vector<KeyPoint> alignedKps1, alignedKps2;
for (size_t i = 0; i < matches.size(); i++) {
alignedKps1.push_back(leftPattern->keypoints[matches[i].queryIdx]);
alignedKps2.push_back(rightPattern->keypoints[matches[i].trainIdx]);
}
//Keypoints to points
vector<Point2f> ps1, ps2;
for (unsigned i = 0; i < alignedKps1.size(); i++)
ps1.push_back(alignedKps1[i].pt);
for (unsigned i = 0; i < alignedKps2.size(); i++)
ps2.push_back(alignedKps2[i].pt);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
使用RANSAC方法计算基础矩阵后可以得到一个status向量,用来删除错误的匹配
//优化匹配结果
vector<KeyPoint> leftInlier;
vector<KeyPoint> rightInlier;
vector<DMatch> inlierMatch;
int index = 0;
for (unsigned i = 0; i < matches.size(); i++) {
if (status[i] != 0){
leftInlier.push_back(alignedKps1[i]);
rightInlier.push_back(alignedKps2[i]);
matches[i].trainIdx = index;
matches[i].queryIdx = index;
inlierMatch.push_back(matches[i]);
index++;
}
}
leftPattern->keypoints = leftInlier;
rightPattern->keypoints = rightInlier;
matches = inlierMatch;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
计算单应矩阵H,并细化匹配结果
同基础矩阵类似,得到匹配的特征点后也可以计算单应矩阵。
//! computes the best-fit perspective transformation mapping srcPoints to dstPoints.
CV_EXPORTS_W Mat findHomography( InputArray srcPoints, InputArray dstPoints,
int method=0, double ransacReprojThreshold=3,
OutputArray mask=noArray());- 1
- 2
- 3
- 4
参数说明:
srcPoints,dstPoints是两视图中匹配的点
method 是计算单应矩阵所使用的方法,是一个枚举值。
ransacReprojThreshold 是允许的最大反投影错误,只在使用RANSAC方法时有效。
mask 同findFundamentalMat 类似,指出匹配的点是不是离群值,用来优化匹配结果。
void FeatureMatchTest::refineMatcheswithHomography(vector<DMatch>& matches, double reprojectionThreshold, Mat& homography){
const int minNumbermatchesAllowed = 8;
if (matches.size() < minNumbermatchesAllowed)
return;
//Prepare data for findHomography
vector<Point2f> srcPoints(matches.size());
vector<Point2f> dstPoints(matches.size());
for (size_t i = 0; i < matches.size(); i++) {
srcPoints[i] = rightPattern->keypoints[matches[i].trainIdx].pt;
dstPoints[i] = leftPattern->keypoints[matches[i].queryIdx].pt;
}
//find homography matrix and get inliers mask
vector<uchar> inliersMask(srcPoints.size());
homography = findHomography(srcPoints, dstPoints, CV_FM_RANSAC, reprojectionThreshold, inliersMask);
vector<DMatch> inliers;
for (size_t i = 0; i < inliersMask.size(); i++){
if (inliersMask[i])
inliers.push_back(matches[i]);
}
matches.swap(inliers);
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
定义了Pattern结构用来保存匹配过程中需要用到的数据
struct Pattern
{
cv::Mat image;
std::vector<cv::KeyPoint> keypoints;
cv::Mat descriptors;
Pattern(cv::Mat& img) :
image(img) {}
};- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
将各种匹配方法封装到了一个类中,在该类的构造函数中填充Pattern取得匹配所需的数据
FeatureMatchTest::FeatureMatchTest(std::shared_ptr<Pattern> left, std::shared_ptr<Pattern> right, std::shared_ptr<cv::DescriptorMatcher> matcher) :
leftPattern(left), rightPattern(right), matcher(matcher) {
//step1:Create detector
int minHessian = 400;
SurfFeatureDetector detector(minHessian);
//step2:Detecte keypoint
detector.detect(leftPattern->image, leftPattern->keypoints);
detector.detect(rightPattern->image, rightPattern->keypoints);
//step3:Compute descriptor
detector.compute(leftPattern->image, leftPattern->keypoints, leftPattern->descriptors);
detector.compute(rightPattern->image, rightPattern->keypoints, rightPattern->descriptors);
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15

