
- 1卷积神经网络(CNN)实现mnist手写数字识别_设计一个卷积神经网络,实现mnist手写数字识别
- 2Quake4之Fx_quake4 命令行
- 3树状数组(右侧小于当前元素个数)_计算右侧小于当前元素的个数 树状数组
- 4Docker 容器基础介绍_docker容器
- 5HarmonyOS最核心的“分布式软总线”技术解读_harmony 分布式软总线
- 6哈希表查找(散列表查找) c++实现HashMap_哈希查找c++实现
- 7Python编写的计算跳过带有特定数字的车位数量小程序,并利用wxPython做成GUI界面打包成可执行文件(Part1)
- 8是时候拥抱ViewBinding了~_viewbinding在dialog里的使用
- 902:HAL库---GPIO
- 10用【Python】制作好玩的【滑雪大冒险】游戏。
(学习日记)2024.03.09:UCOSIII第十一节:就绪列表
赞
踩
写在前面:
由于时间的不足与学习的碎片化,写博客变得有些奢侈。
但是对于记录学习(忘了以后能快速复习)的渴望一天天变得强烈。
既然如此
不如以天为单位,以时间为顺序,仅仅将博客当做一个知识学习的目录,记录笔者认为最通俗、最有帮助的资料,并尽量总结几句话指明本质,以便于日后搜索起来更加容易。
标题的结构如下:“类型”:“知识点”——“简短的解释”
部分内容由于保密协议无法上传。
点击此处进入学习日记的总目录
二十四、UCOSIII:就绪列表
在μC/OS-III中,任务被创建后,任务的TCB会被放入就绪列表中,表示任务在就绪,随时可能被运行。 就绪列表包含一个表示任务优先级的优先级表,一个存储任务TCB的TCB双向链表。
1、优先级表
优先级表在代码层面上来看,就是一个数组,在文件os_prio.c(Source中新建)的开头定义
/* 定义优先级表,在os.h中用extern声明 */
CPU_DATA OSPrioTbl[OS_PRIO_TBL_SIZE];
- 1
- 2
正如我们所说,优先级表是一个数组, 数组类型为CPU_DATA,在Cortex-M内核芯片的MCU中CPU_DATA为32位整型。
数组的大小由宏OS_PRIO_TBL_SIZE控制。
OS_PRIO_TBL_SIZE的具体取值与μC/OS-III支持多少个优先级有关,支持的优先级越多, 优先级表也就越大,需要的RAM空间也就越多。理论上μC/OS-III支持无限的优先级,只要RAM控制足够。
宏OS_PRIO_TBL_SIZE在os.h文件定义,具体实现见
#define OS_PRIO_TBL_SIZE((OS_CFG_PRIO_MAX - 1u) / (DEF_INT_CPU_NBR_BITS) + 1u)
- 1
OS_CFG_PRIO_MAX表示支持多少个优先级, 在os_cfg.h中定义,本书设置为32,即最大支持32个优先级。DEF_INT_CPU_NBR_BITS定义CPU整型数据有多少位, 本书适配的是基于Cortex-M系列的MCU,宏展开为32位。
所以,经过OS_CFG_PRIO_MAX和DEF_INT_CPU_NBR_BITS这两个宏展开运算之后,可得出OS_PRIO_TBL_SIZE的值为1, 即优先级表只需要一个成员即可表示32个优先级。如果要支持64个优先级,即需要两个成员,以此类推。 如果MCU的类型是16位、8位或者64位,只需要把优先级表的数据类型CPU_DATA改成相应的位数即可。
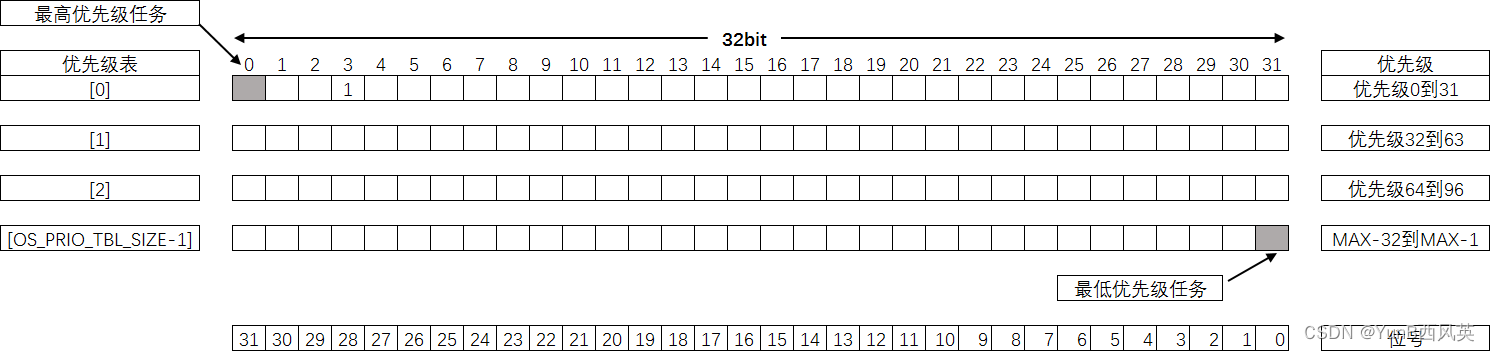
那么优先级表又是如何跟任务的优先级联系在一起的?具体的优先级表的示意图见图
2、 优先级表函数讲解
优先级表相关的函数在os_prio.c文件中实现,在os.h文件中声明,函数汇总具体见下表。
| 函数名称 | 函数作用 |
|---|---|
| OS_PrioInit | 初始化优先级表 |
| OS_PrioInsert | 设置优先级表中相应的位 |
| OS_PrioRemove | 清除优先级表中相应的位 |
| OS_PrioGetHighest | 查找最高的优先级 |
1. OS_PrioInit()函数
OS_PrioInit()函数用于初始化优先级表,在OSInit()函数中被调用:
void OS_PrioInit( void )
{
CPU_DATA i;
/* 默认全部初始化为0 */
for ( i=0u; i<OS_PRIO_TBL_SIZE; i++ )
{
OSPrioTbl[i] = (CPU_DATA)0;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
本章中,优先级表OS_PrioTbl[]只有一个成员,即OS_PRIO_TBL_SIZE等于1经过OS_PrioInit()初始化之后, 具体示意图见图:

2. OS_PrioInsert()函数
OS_PrioInsert()函数用于置位优先级表中相应的位,会被OSTaskCreate()函数调用
/* 置位优先级表中相应的位 */
void OS_PrioInsert (OS_PRIO prio)
{
CPU_DATA bit;
CPU_DATA bit_nbr;
OS_PRIO ix;
/* 求模操作,获取优先级表数组的下标索引 */
ix = prio / DEF_INT_CPU_NBR_BITS; //(1)
/* 求余操作,将优先级限制在DEF_INT_CPU_NBR_BITS之内 */
bit_nbr = (CPU_DATA)prio & (DEF_INT_CPU_NBR_BITS - 1u); //(2)
/* 获取优先级在优先级表中对应的位的位置 */ //(3)
bit = 1u;
bit <<= (DEF_INT_CPU_NBR_BITS - 1u) - bit_nbr;
/* 将优先级在优先级表中对应的位置1 */
OSPrioTbl[ix] |= bit; //(4)
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- (1):求模操作,获取优先级表数组的下标索引。即定位
prio这个优先级对应优先级表数组的哪个成员。 假设prio等于3,DEF_INT_CPU_NBR_BITS(用于表示CPU一个整型数有多少位)等于32,那么ix就等于0,即对应OSPrioTBL[0]。 - (2):求余操作,将优先级限制在
DEF_INT_CPU_NBR_BITS之内, 超过DEF_INT_CPU_NBR_BITS的优先级就肯定要增加优先级表的数组成员了。假设prio等于3,DEF_INT_CPU_NBR_BITS(用于表示CPU一个整型数有多少位)等于32,那么bit_nbr就等于3, 但是这个还不是真正需要被置位的位。 - (3):获取优先级在优先级表中对应的位的位置。置位优先级对应的位是从高位开始的, 不是从低位开始。位31对应的是优先级0,在
μC/OS-III中,优先级数值越小,逻辑优先级就越高。 假设prio等于3,DEF_INT_CPU_NBR_BITS(用于表示CPU一个整型数有多少位)等于32,那么bit就等于28。 - (4):将优先级在优先级表中对应的位置1。假设
prio等于3,DEF_INT_CPU_NBR_BITS(用于表示CPU一个整型数有多少位)等于32,那么置位的就是OSPrioTbl[0]的位28。
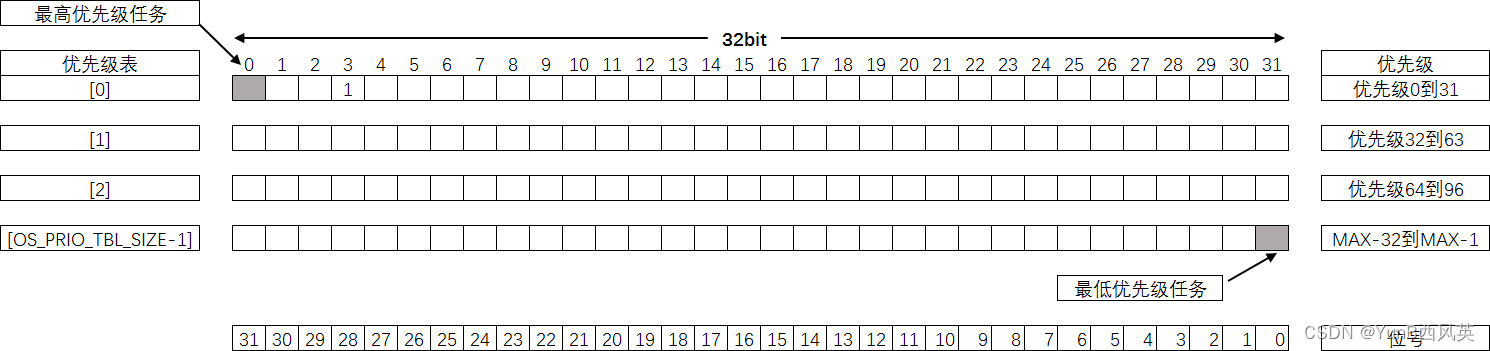
在优先级最大是32,DEF_INT_CPU_NBR_BITS等于32的情况下,如果分别创建了优先级3、5、8和11这四个任务,任务创建成功后, 优先级表的设置情况是怎么样的?具体见下图

有一点要注意的是,在μC/OS-III中, 最高优先级和最低优先级是留给系统任务使用的,用户任务不能使用。
3. OS_PrioRemove()函数
OS_PrioRemove()函数用于清除优先级表中相应的位,与OS_PrioInsert()函数的作用刚好相反, 具体实现如下
/* 清除优先级表中相应的位 */
void OS_PrioRemove (OS_PRIO prio)
{
CPU_DATA bit;
CPU_DATA bit_nbr;
OS_PRIO ix;
/* 求模操作,获取优先级表数组的下标索引 */
ix = prio / DEF_INT_CPU_NBR_BITS;
/* 求余操作,将优先级限制在DEF_INT_CPU_NBR_BITS之内 */
bit_nbr = (CPU_DATA)prio & (DEF_INT_CPU_NBR_BITS - 1u);
/* 获取优先级在优先级表中对应的位的位置 */
bit = 1u;
bit <<= (DEF_INT_CPU_NBR_BITS - 1u) - bit_nbr;
/* 将优先级在优先级表中对应的位清零 */
OSPrioTbl[ix] &= ~bit;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
与OS_PrioInsert()函数中不同的是置位操作改成了清零。
4. OS_PrioGetHighest()函数
OS_PrioGetHighest()函数用于从优先级表中查找最高的优先级
/* 获取最高的优先级 */
OS_PRIO OS_PrioGetHighest (void)
{
CPU_DATA *p_tbl;
OS_PRIO prio;
prio = (OS_PRIO)0;
/* 获取优先级表首地址 */
p_tbl = &OSPrioTbl[0]; // (1)
/* 找到数值不为0的数组成员 */ //(2)
while (*p_tbl == (CPU_DATA)0)
{
prio += DEF_INT_CPU_NBR_BITS;
p_tbl++;
}
/* 找到优先级表中置位的最高的优先级 */
prio += (OS_PRIO)CPU_CntLeadZeros(*p_tbl); //(3)
return (prio);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- (1):获取优先级表的首地址,从头开始搜索整个优先级表,直到找到最高的优先级。
- (2):找到优先级表中数值不为
0的数组成员,只要不为0就表示该成员里面至少有一个位是置位的。 我们知道,在下图图一 的优先级表中,优先级按照从左到右,从上到下依次减小,左上角为最高的优先级, 右下角为最低的优先级,所以我们只需要找到第一个不是0的优先级表成员即可。 - (3):确定好优先级表中第一个不为
0的成员后, 然后再找出该成员中第一个置1的位(从高位到低位开始找)就算找到最高优先级。
在一个变量中, 按照从高位到低位的顺序查找第一个置1的位的方法是通过计算前导0函数CPU_CntLeadZeros()来实现的。
从高位开始找1叫计算前导0,从低位开始找1叫计算后导0。
如果分别创建了优先级3、5、8和11这四个任务, 任务创建成功后,优先级表的设置情况具体见下图图二。
调用CPU_CntLeadZeros()可以计算出OSPrioTbl[0]第一个置1的位前面有3个0,那么这个3就是我们要查找的最高优先级, 至于后面还有多少个位置1我们都不用管,只需要找到第一个1即可。

CPU_CntLeadZeros()函数可由汇编或者C来实现,如果使用的处理器支持前导零指令CLZ,可由汇编来实现,加快指令运算,如果不支持则由C来实现。 在μC/OS-III中,这两种实现方法均有提供代码,到底使用哪种方法由CPU_CFG_LEAD_ZEROS_ASM_PRESEN这个宏来控制, 定义了这个宏则使用汇编来实现,没有定义则使用C来实现。
Cortex-M系列处理器自带CLZ指令,所以CPU_CntLeadZeros()函数默认由汇编编写,具体在cpu_a.asm文件实现, 在cpu.h文件声明
;*******************************************************************
; PUBLIC FUNCTIONS
;*******************************************************************
EXPORT CPU_CntLeadZeros
EXPORT CPU_CntTrailZeros
;*******************************************************************
; 计算前导0函数
;
; 描述:
;
; 函数声明: CPU_DATA CPU_CntLeadZeros(CPU_DATA val);
;
;*******************************************************************
CPU_CntLeadZeros
CLZ R0, R0 ; Count leading zeros
BX LR
;*******************************************************************
; 计算后导0函数
;
; 描述:
;
; 函数声明: CPU_DATA CPU_CntTrailZeros(CPU_DATA val);
;
;*******************************************************************
CPU_CntTrailZeros
RBIT R0, R0 ; Reverse bits
CLZ R0, R0 ; Count trailing zeros
BX LR
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
/*
*******************************************************************
* 函数声明
* cpu.h文件
*******************************************************************
*/
#define CPU_CFG_LEAD_ZEROS_ASM_PRESEN
CPU_DATA CPU_CntLeadZeros (CPU_DATA val); /* 在cpu_a.asm定义 */
CPU_DATA CPU_CntTrailZeros(CPU_DATA val); /* 在cpu_a.asm定义 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
如果处理器不支持前导0指令,CPU_CntLeadZeros()函数就得由C编写,具体在cpu_core.c文件实现, 在cpu.h文件声明
#ifndef CPU_CFG_LEAD_ZEROS_ASM_PRESENT
CPU_DATA CPU_CntLeadZeros (CPU_DATA val)
{
CPU_DATA nbr_lead_zeros;
CPU_INT08U ix;
/* 检查高16位 */
if (val > 0x0000FFFFu) { //(1)
/* 检查 bits [31:24] : */
if (val > 0x00FFFFFFu) { //(2)
/* 获取bits [31:24]的值,并转换成8位 */
ix = (CPU_INT08U)(val >> 24u); //(3)
/* 查表找到优先级 */
nbr_lead_zeros=(CPU_DATA)(CPU_CntLeadZerosTbl[ix]+0u); //(4)
}
/* 检查 bits [23:16] : */
else {
/* 获取bits [23:16]的值,并转换成8位 */
ix = (CPU_INT08U)(val >> 16u);
/* 查表找到优先级 */
nbr_lead_zeros = (CPU_DATA )(CPU_CntLeadZerosTbl[ix] + 8u);
}
}
/* 检查低16位 */
else {
/* 检查 bits [15:08] : */
if (val > 0x000000FFu) {
/* 获取bits [15:08]的值,并转换成8位 */
ix = (CPU_INT08U)(val >> 8u);
/* 查表找到优先级 */
nbr_lead_zeros = (CPU_DATA )(CPU_CntLeadZerosTbl[ix] + 16u);
}
/* 检查 bits [07:00] : */
else {
/* 获取bits [15:08]的值,并转换成8位 */
ix = (CPU_INT08U)(val >> 0u);
/* 查表找到优先级 */
nbr_lead_zeros = (CPU_DATA )(CPU_CntLeadZerosTbl[ix] + 24u);
}
}
/* 返回优先级 */
return (nbr_lead_zeros);
}
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
在μC/OS-III中,由C实现的CPU_CntLeadZeros()函数支持8位、16位、32位和64位的变量的前导0计算, 但最终的代码实现都是分离成8位来计算。这里我们只讲解32位的,其他几种情况都类似。
- (1):分离出高16位,
else则为低16位。 - (2):分离出高16位的高8位,
else则为高16位的低8位。 - (3):将高16位的高8位通过移位强制转化为8位的变量,用于后面的查表操作。
- (4):将8位的变量
ix作为数组CPU_CntLeadZerosTbl[]的索引, 返回索引对应的值,那么该值就是8位变量ix对应的前导0,然后再加上(24-右移的位数)就等于优先级。 数组CPU_CntLeadZerosTbl[]在cpu_core.c的开头定义
#ifndef CPU_CFG_LEAD_ZEROS_ASM_PRESENT
static const CPU_INT08U CPU_CntLeadZerosTbl[256] = {/* 索引 */
8u,7u,6u,6u,5u,5u,5u,5u,4u,4u,4u,4u,4u,4u,4u,4u, /* 0x00 to 0x0F */
3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u,3u, /* 0x10 to 0x1F */
2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u, /* 0x20 to 0x2F */
2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u,2u, /* 0x30 to 0x3F */
1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u, /* 0x40 to 0x4F */
1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u, /* 0x50 to 0x5F */
1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u, /* 0x60 to 0x6F */
1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u,1u, /* 0x70 to 0x7F */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0x80 to 0x8F */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0x90 to 0x9F */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0xA0 to 0xAF */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0xB0 to 0xBF */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0xC0 to 0xCF */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0xD0 to 0xDF */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u, /* 0xE0 to 0xEF */
0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u,0u /* 0xF0 to 0xFF */
};
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
对一个32位的变量算前导0个数的时候都是分离成8位的变量来计算,然后将这个8位的变量作为数组 CPU_CntLeadZerosTbl[]的索引,索引下对应的值就是这个8位变量的前导0个数。
一个8位的变量的取值范围为0~0XFF, 这些值作为数组CPU_CntLeadZerosTbl[]的索引,每一个值的前导0个数都预先算出来作为该数组索引下的值。
如 0x01的二进制为 0000 0001,所以前导零为 7
如 0x50的二进制为 0101 0000,所以前导零为 1
通过查CPU_CntLeadZerosTbl[]这个表就可以很快的知道一个8位变量的前导0个数,根本不用计算, 只是浪费了定义CPU_CntLeadZerosTbl[]这个表的一点点空间而已,在处理器内存很充足的情况下, 则优先选择这种空间换时间的方法。
3、就绪列表
准备好运行的任务的TCB都会被放到就绪列表中,系统可随时调度任务运行。
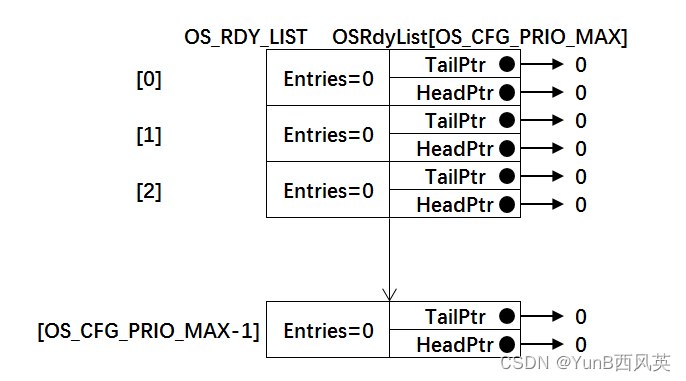
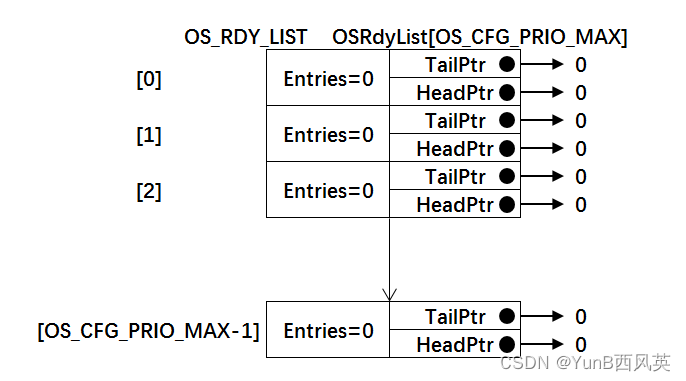
就绪列表在代码的层面上看就是一个 OS_RDY_LIST数据类型的数组OSRdyList[],数组的大小由宏OS_CFG_PRIO_MAX决定,支持多少个优先级, OSRdyList[]就有多少个成员。
任务的优先级与OSRdyList[]的索引一一对应,比如优先级3的任务的TCB会被放到OSRdyList[3]中。
OSRdyList[]是一个在os.h文件中定义的全局变量
/* 就绪列表定义 */
OS_EXT OS_RDY_LIST OSRdyList[OS_CFG_PRIO_MAX];
- 1
- 2
OS_RDY_LIST在os.h中定义,专用于就绪列表
typedefstruct os_rdy_list OS_RDY_LIST; //(1)
struct os_rdy_list {
OS_TCB *HeadPtr; //(2)
OS_TCB *TailPtr;
OS_OBJ_QTY NbrEntries; //(3)
};
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- (1):在
μC/OS-III中,内核对象的数据类型都会用大写字母重新定义。 - (2):
OSRdyList[]的成员与任务的优先级一一对应, 同一个优先级的多个任务会以双向链表的形式存在OSRdyList[]同一个索引下,那么HeadPtr就用于指向链表的头节点,TailPtr用于指向链表的尾节点,该优先级下的索引成员的地址则称为该优先级下双向链表的根节点, 知道根节点的地址就可以查找到该链表下的每一个节点。 - (3):
NbrEntries表示OSRdyList[]同一个索引下有多少个任务。
一个空的就绪列表,OSRdyList[]索引下的HeadPtr、TailPtr和NbrEntrie都会被初始化为0,具体见图
就绪列表相关的所有函数都在os_core.c实现,这些函数都是以“OS_”开头,表示是OS的内部函数, 用户不能调用,这些函数的汇总具体见下表。
| 函数名称 | 函数作用 |
|---|---|
| OS_RdyListInit | 初始化就绪列表为空 |
| OS_RdyListInsert | 插入一个TCB到就绪列表 |
| OS_RdyListInsertHead | 插入一个TCB到就绪列表的头部 |
| OS_RdyListInsertTail | 插入一个TCB到就绪列表的尾部 |
| OS_RdyListMoveHeadToTail | 将TCB从就绪列表的头部移到尾部 |
| OS_RdyListRemove | 将TCB从就绪列表中移除 |
TCB简介
操作系统中一个线程对应着一个TCB(Thread Control Block),叫做线程控制模块,控制着线程的运行和调度。
TCB组成
1、threadID:线程的唯一标识。
2、status:线程的运行状态
3、register:线程关于CPU中寄存器的情况
4、PC程序计数器:线程执行的下一条指令的地址
5、优先级:线程在操作系统调度的时候的优先级
6、线程的专属存储区:线程单独的存储区域
7、用户栈:线程执行的用户方法栈,用来保存线程当前执行的用户方法的信息
8、内核栈:线程执行的内核方法栈,用来保存线程当前执行的内核方法信息。
4、就绪列表函数讲解
在实现就绪列表相关函数之前,我们需要在结构体os_tcb中添加Prio、NextPtr和PrevPtr这三个成员, 然后在os.h中定义两个全局变量OSPrioCur和OSPrioHighRdy。
接下来要实现的就绪列表相关的函数会用到几个变量。
struct os_tcb {
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
/* 任务延时周期个数 */
OS_TICK TaskDelayTicks;
/* 任务优先级 */
OS_PRIO Prio;
/* 就绪列表双向链表的下一个指针 */
OS_TCB *NextPtr;
/* 就绪列表双向链表的前一个指针 */
OS_TCB *PrevPtr;
};
/* 在os.h中定义 */
OS_EXT OS_PRIO OSPrioCur; /* 当前优先级 */
OS_EXT OS_PRIO OSPrioHighRdy; /* 最高优先级 */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
1. OS_RdyListInit()函数
OS_RdyListInit()用于将就绪列表OSRdyList[]初始化为空
void OS_RdyListInit(void)
{
OS_PRIO i;
OS_RDY_LIST *p_rdy_list;
/* 循环初始化,所有成员都初始化为0 */
for ( i=0u; i<OS_CFG_PRIO_MAX; i++ ) {
p_rdy_list = &OSRdyList[i];
p_rdy_list->NbrEntries = (OS_OBJ_QTY)0;
p_rdy_list->HeadPtr = (OS_TCB *)0;
p_rdy_list->TailPtr = (OS_TCB *)0;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
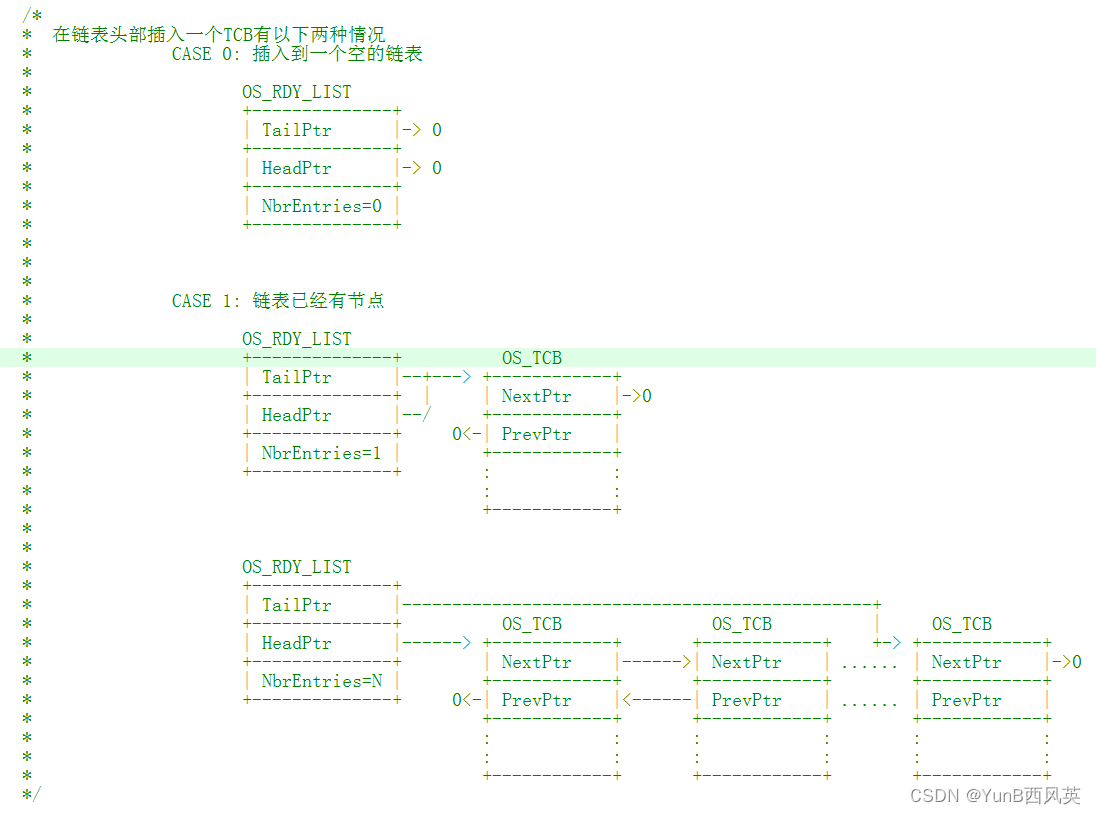
2. OS_RdyListInsertHead()函数
OS_RdyListInsertHead()用于在链表头部插入一个TCB节点,插入的时候分两种情况,第一种是链表是空链表, 第二种是链表中已有节点,具体示意图见图
void OS_RdyListInsertHead (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb2;
/* 获取链表根部 */
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* CASE 0: 链表是空链表 */
if (p_rdy_list->NbrEntries == (OS_OBJ_QTY)0) {
p_rdy_list->NbrEntries = (OS_OBJ_QTY)1;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
/* CASE 1: 链表已有节点 */
else {
p_rdy_list->NbrEntries++;
p_tcb->NextPtr = p_rdy_list->HeadPtr;
p_tcb->PrevPtr = (OS_TCB *)0;
p_tcb2 = p_rdy_list->HeadPtr;
p_tcb2->PrevPtr = p_tcb;
p_rdy_list->HeadPtr = p_tcb;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
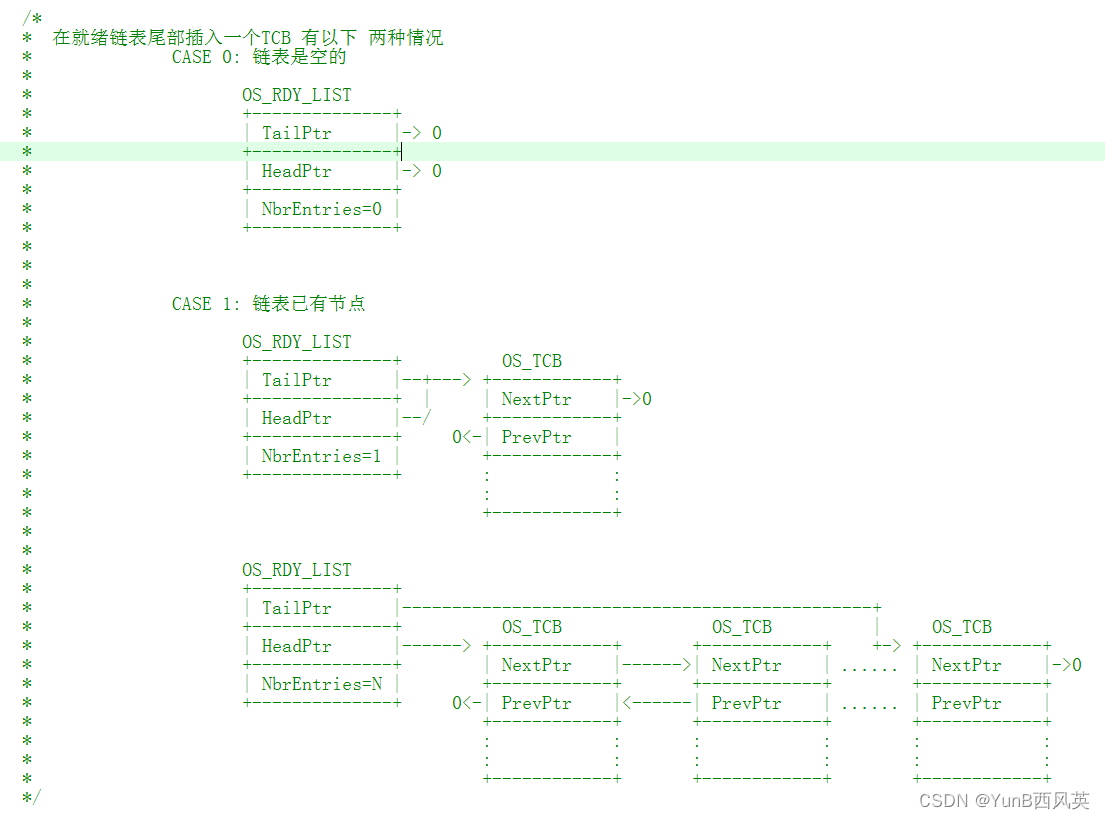
3. OS_RdyListInsertTail()函数
OS_RdyListInsertTail()用于在链表尾部插入一个TCB节点,插入的时候分两种情况,第一种是链表是空链表, 第二种是链表中已有节点
void OS_RdyListInsertTail (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb2;
/* 获取链表根部 */
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* CASE 0: 链表是空链表 */
if (p_rdy_list->NbrEntries == (OS_OBJ_QTY)0) {
p_rdy_list->NbrEntries = (OS_OBJ_QTY)1;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
/* CASE 1: 链表已有节点 */
else {
p_rdy_list->NbrEntries++;
p_tcb->NextPtr = (OS_TCB *)0;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb->PrevPtr = p_tcb2;
p_tcb2->NextPtr = p_tcb;
p_rdy_list->TailPtr = p_tcb;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
4. OS_RdyListInsert()函数
OS_RdyListInsert()用于将任务的TCB插入就绪列表,插入的时候分成两步。
第一步是根据优先级将优先级表中的相应位置位, 这个调用OS_PrioInsert()函数来实现。
第二步是根据优先级将任务的TCB放到OSRdyList[优先级]中, 如果优先级等于当前的优先级则插入链表的尾部,否则插入链表的头部
/* 在就绪链表中插入一个TCB */
void OS_RdyListInsert (OS_TCB *p_tcb)
{
/* 将优先级插入优先级表 */
OS_PrioInsert(p_tcb->Prio);
if (p_tcb->Prio == OSPrioCur)
{
/* 如果是当前优先级则插入链表尾部 */
OS_RdyListInsertTail(p_tcb);
}
else
{
/* 否则插入链表头部 */
OS_RdyListInsertHead(p_tcb);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
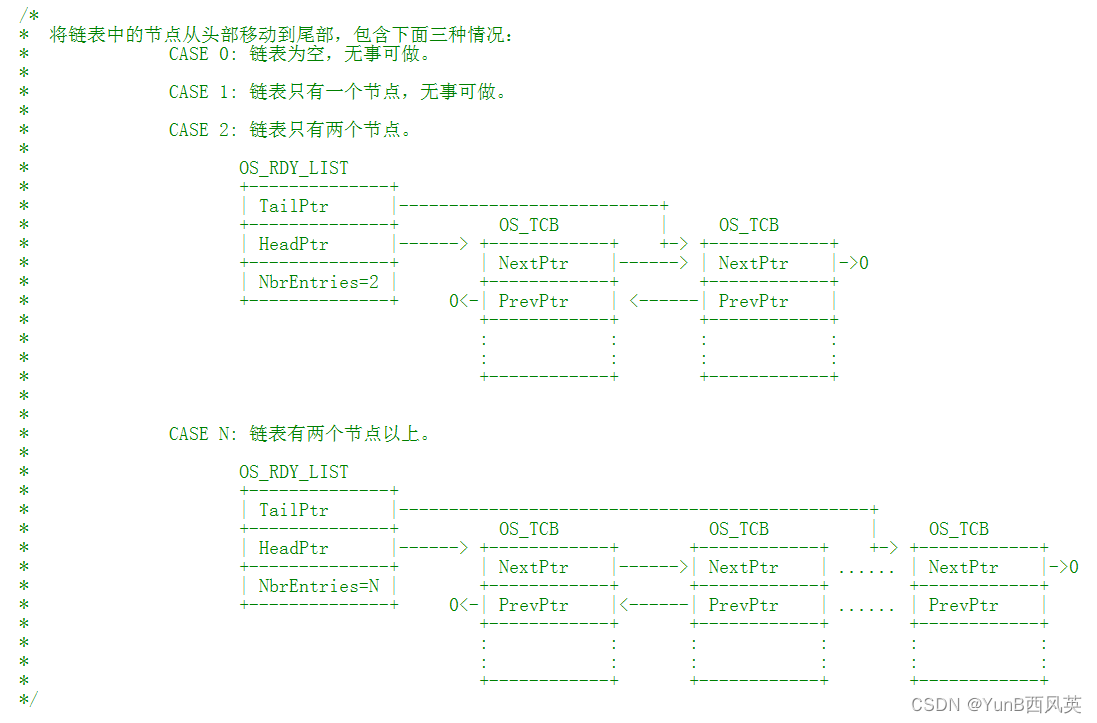
5. OS_RdyListMoveHeadToTail()函数
OS_RdyListMoveHeadToTail()函数用于将节点从链表头部移动到尾部,移动的时候分四种情况。
第一种是链表为空,无事可做;
第二种是链表只有一个节点,也是无事可做;
第三种是链表只有两个节点;
第四种是链表有两个以上节点
void OS_RdyListMoveHeadToTail (OS_RDY_LIST *p_rdy_list)
{
OS_TCB *p_tcb1;
OS_TCB *p_tcb2;
OS_TCB *p_tcb3;
switch (p_rdy_list->NbrEntries) {
case 0:
case 1:
break;
case 2:
p_tcb1 = p_rdy_list->HeadPtr;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb1->PrevPtr = p_tcb2;
p_tcb1->NextPtr = (OS_TCB *)0;
p_tcb2->PrevPtr = (OS_TCB *)0;
p_tcb2->NextPtr = p_tcb1;
p_rdy_list->HeadPtr = p_tcb2;
p_rdy_list->TailPtr = p_tcb1;
break;
default:
p_tcb1 = p_rdy_list->HeadPtr;
p_tcb2 = p_rdy_list->TailPtr;
p_tcb3 = p_tcb1->NextPtr;
p_tcb3->PrevPtr = (OS_TCB *)0;
p_tcb1->NextPtr = (OS_TCB *)0;
p_tcb1->PrevPtr = p_tcb2;
p_tcb2->NextPtr = p_tcb1;
p_rdy_list->HeadPtr = p_tcb3;
p_rdy_list->TailPtr = p_tcb1;
break;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
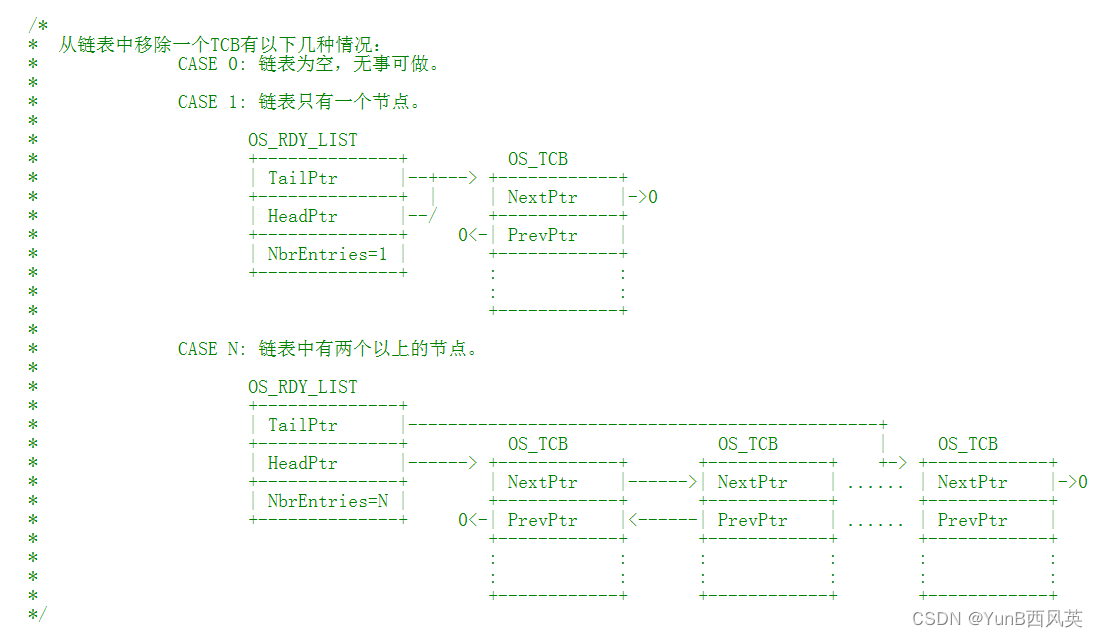
6. OS_RdyListRemove()函数
OS_RdyListRemove()函数用于从链表中移除一个节点,移除的时候分为三种情况,第一种是链表为空,无事可做; 第二种是链表只有一个节点;第三种是链表有两个以上节点,具体示意图见图
void OS_RdyListRemove (OS_TCB *p_tcb)
{
OS_RDY_LIST *p_rdy_list;
OS_TCB *p_tcb1;
OS_TCB *p_tcb2;
p_rdy_list = &OSRdyList[p_tcb->Prio];
/* 保存要删除的TCB节点的前一个和后一个节点 */
p_tcb1 = p_tcb->PrevPtr;
p_tcb2 = p_tcb->NextPtr;
/* 要移除的TCB节点是链表中的第一个节点 */
if (p_tcb1 == (OS_TCB *)0)
{
/* 且该链表中只有一个节点 */
if (p_tcb2 == (OS_TCB *)0)
{
/* 根节点全部初始化为0 */
p_rdy_list->NbrEntries = (OS_OBJ_QTY)0;
p_rdy_list->HeadPtr = (OS_TCB *)0;
p_rdy_list->TailPtr = (OS_TCB *)0;
/* 清除在优先级表中相应的位 */
OS_PrioRemove(p_tcb->Prio);
}
/* 该链表中不止一个节点 */
else
{
/* 节点减1 */
p_rdy_list->NbrEntries--;
p_tcb2->PrevPtr = (OS_TCB *)0;
p_rdy_list->HeadPtr = p_tcb2;
}
}
/* 要移除的TCB节点不是链表中的第一个节点 */
else
{
p_rdy_list->NbrEntries--;
p_tcb1->NextPtr = p_tcb2;
/* 如果要删除的节点的下一个节点是0,即要删除的节点是最后一个节点 */
if (p_tcb2 == (OS_TCB *)0)
{
p_rdy_list->TailPtr = p_tcb1;
}
else
{
p_tcb2->PrevPtr = p_tcb1;
}
}
/* 复位从就绪列表中删除的TCB的PrevPtr和NextPtr这两个指针 */
p_tcb->PrevPtr = (OS_TCB *)0;
p_tcb->NextPtr = (OS_TCB *)0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56

