
- 1基于FPGA的脱机手写体汉字识别系统_fpga认识中文吗
- 2python游戏开发引擎_3D游戏引擎的原理和架构
- 3Exoplayer源码解析3之解封装器解析_exoplayer 支持mov 格式解封装嘛
- 4“光谱视界革新:ChatGPT在成像光谱遥感中的智能革命“
- 5如何对HttpWebRequest异步调用?
- 6node.js毕业设计教室预约管理小程序(源码+程序+LW+部署)_教室预约系统管理员流程图
- 7[Python] 布尔值(Booleans)
- 8黄鸟抓包app(httpcanary)
- 9eclipse中git拉项目_在Eclipse使用git管理项目工程代码
- 10Linux查看进程PID的方法(linux查进程的pid)附带自动kill 掉_linux查看pid 对应的程序
乐视三合一体感摄像头Astra pro开发记录1(深度图、彩色图及点云简单显示)_letmc-520
赞
踩
在某鱼上淘的乐视三合一体感摄像头,捡漏价九十几块,买来玩玩。
网上已经有一些关于此款摄像头的开发资料。
官方的开发资料:[官网链接](https://orbbec3d.com/index/download.html)
按官方网站以及其他帖子,下载并安装相机的驱动和SDK,不难配置好相机。
据说目前最新的opencv4.5.1提供了Astra相机的api接口,然而我并没有尝试成功,先就这样吧。。
下面这篇文章使用opencv4.5.1配置成功,本人按此方法尝试过确实可行。
全网最详细 Opencv + OpenNi + 奥比中光(Orbbec) Astra Pro /乐视三合一体感摄像头LeTMC-520 + linux 环境搭建
windows系统下开发(win10)
首先安装相机驱动和openni库openni下载链接,注意要在orbbec官网下载,否则OpenNI2\Drivers文件夹下可能不含orbbec.dll和orbbec.ini两个文件,导致找不到相机设备。
python开发环境搭建
安装python的openni包:在终端输入pip3 install openni即可。此外还需安装有opencv-python和numpy。
打开深度摄像头和彩色摄像头
from openni import openni2
import numpy as np
import cv2
def mousecallback(event,x,y,flags,param):
if event==cv2.EVENT_LBUTTONDBLCLK:
print(y, x, dpt[y,x])
if __name__ == "__main__":
openni2.initialize()
dev = openni2.Device.open_any()
print(dev.get_device_info())
depth_stream = dev.create_depth_stream()
depth_stream.start()
cap = cv2.VideoCapture(0)
cv2.namedWindow('depth')
cv2.setMouseCallback('depth',mousecallback)
while True:
frame = depth_stream.read_frame()
dframe_data = np.array(frame.get_buffer_as_triplet()).reshape([480, 640, 2])
dpt1 = np.asarray(dframe_data[:, :, 0], dtype='float32')
dpt2 = np.asarray(dframe_data[:, :, 1], dtype='float32')
dpt2 *= 255
dpt = dpt1 + dpt2
cv2.imshow('depth', dpt)
ret,frame = cap.read()
cv2.imshow('color', frame)
key = cv2.waitKey(1)
if int(key) == ord('q'):
break
depth_stream.stop()
dev.close()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
这个程序是在网上其他帖子找的,不知道为什么深度图的显示好像是二值图。本人对python不是很熟悉,改了一会也没改出来。
如果报错:Exception has occurred: OpenNIError (OniStatus.ONI_STATUS_ERROR, b’DeviceOpen using default: no devices found’, None)…,说明openni环境没有配置好。
在系统变量新建三个变量,变量名分别为OPENNI2_INCLUDE64、OPENNI2_LIB64和OPENNI2_REDIST64,变量值把对应的Include、Lib和Redist文件夹加入。
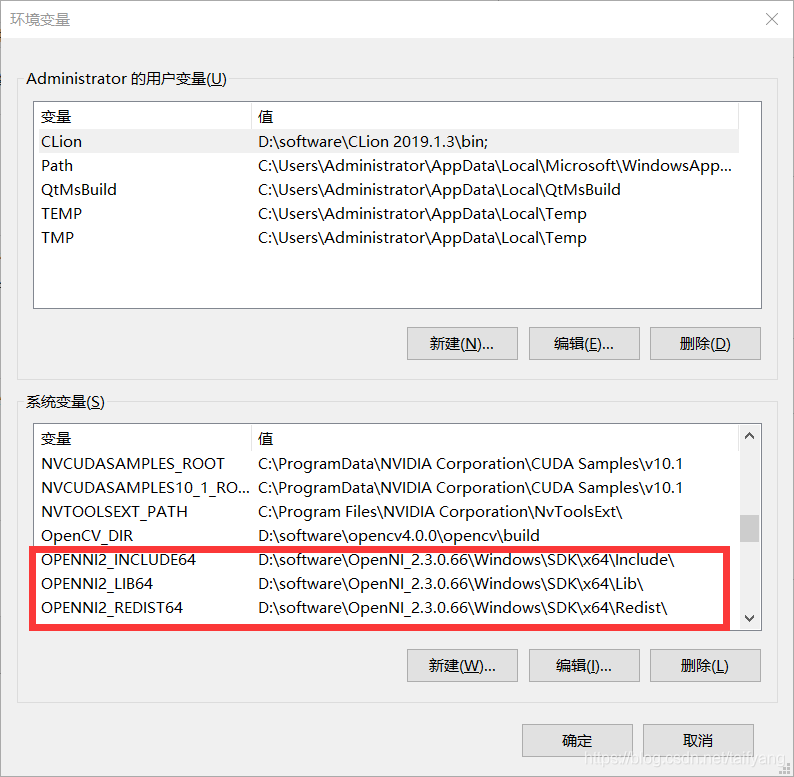
如果程序仍然报错,可以将Redist下的OpenNI2文件夹、OpenNI.ini、OpenNI2.dll以及Lib下的OpenNI2.lib复制到和python程序同一文件夹下再运行程序试试。
C++开发环境搭建
需要安装有依赖库opencv和pcl,其中pcl库中的第三方库3rdParty内包含openni库。
配置如下:
cmake3.15.3
opencv4.0.0
pcl1.8.0
openni2.3.0
vs2015 professional
Qt5.9.1
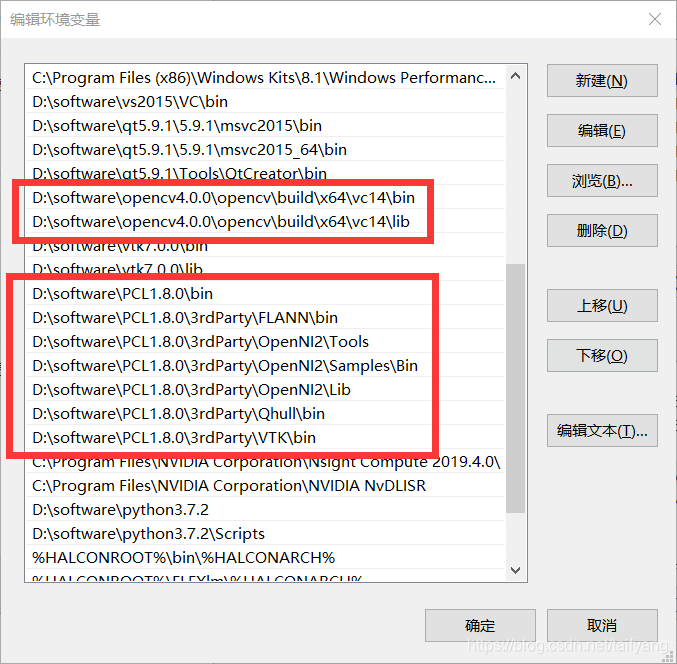
环境变量如下图:
下面是C++的程序:
/********************************************************************************
** @ Copyright(c) $year$ $registered organization$ All Rights Reserved.
** @auth: taify
** @date: 2021/2/16
** @desc: ***
** @Ver : V1.0.0
*********************************************************************************/
#define _CRT_SECURE_NO_WARNINGS
#include <iostream>
#include <opencv2/opencv.hpp>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <OpenNI.h>
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;
// 相机内参
const double camera_factor = 1000;
const double camera_cx = 311.0;
const double camera_cy = 244.0;
const double camera_fx = 593.0;
const double camera_fy = 588.0;
int main(int argc, char* argv[])
{
//初始化OpenNI SDK
openni::OpenNI::initialize();
//打开设备
openni::Device device;
device.open(openni::ANY_DEVICE);
std::cout << device.getDeviceInfo().getUri() << std::endl;
//创建深度流
openni::VideoStream depthStream;
depthStream.create(device, openni::SENSOR_DEPTH);
//配置深度流的模式
openni::VideoMode depthMode;
depthMode.setResolution(640, 480);
depthMode.setPixelFormat(openni::PIXEL_FORMAT_DEPTH_1_MM);
depthMode.setFps(30);
depthStream.setVideoMode(depthMode);
//打开深度摄像头
depthStream.start();
openni::VideoFrameRef depth_frame;
int iMaxDepth = depthStream.getMaxPixelValue();
//打开彩色摄像头
cv::VideoCapture capture;
capture.open(0);
cv::Mat depthMat, rgbMat;
PointCloud::Ptr cloud(new PointCloud); // 使用智能指针创建一个空点云。
pcl::visualization::CloudViewer viewer("Cloud Viewer");
//循环采图
while (true)
{
openni::VideoStream* pstream = &depthStream;
int changedStreamDummy;
openni::Status rc = openni::OpenNI::waitForAnyStream(&pstream, 1, &changedStreamDummy, 100); //等待一帧
if (rc != openni::STATUS_OK)
continue;
//获取深度帧数据
rc = depthStream.readFrame(&depth_frame);
if (rc == openni::STATUS_OK)
{
auto depth = depth_frame.getData();
auto depthWidth = depth_frame.getWidth();
auto depthHeight = depth_frame.getHeight();
//处理并渲染深度帧数据
cv::Mat rawMat(depthHeight, depthWidth, CV_16UC1, (void*)depth);
rawMat.convertTo(depthMat, CV_8UC1, 255.0 / iMaxDepth);
cv::imshow("Depth Viewer", depthMat); //显示深度图
}
capture >> rgbMat;
cv::flip(rgbMat, rgbMat, 1);
cv::imshow("rgb Viewer", rgbMat); //显示彩色图
cv::waitKey(100); //不加waitkey会卡住
cloud->clear();
// 遍历深度图
for (int i = 0; i < depthMat.rows; ++i)
{
for (int j = 0; j < depthMat.cols; ++j)
{
// 获取深度图中(m,n)处的值
uchar d = depthMat.ptr<uchar>(i)[j];
// d 可能没有值,若如此,跳过此点
if (d == 0)
continue;
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (j - camera_cx) * p.z / camera_fx;
p.y = -(i - camera_cy) * p.z / camera_fy;
// 从rgb图像中获取它的颜色
p.b = rgbMat.at<cv::Vec3b>(i, j)[0];
p.g = rgbMat.at<cv::Vec3b>(i, j)[1];
p.r = rgbMat.at<cv::Vec3b>(i, j)[2];
// 把p加入到点云中
cloud->points.push_back(p);
}
}
viewer.showCloud(cloud); //显示点云
//viewer窗口关闭则退出循环
if (viewer.wasStopped())
break;
}
//释放资源
depthStream.stop();
depthStream.destroy();
device.close();
openni::OpenNI::shutdown();
capture.release();
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
这段C++程序的功能和上面的python程序都实现了摄像头的深度图和彩色图显示,另外增加了点云的显示功能(只是简单的深度图与彩色图的对应计算,没有做depth和rgb的对齐,懒得标定。。相机内参也是在网上搜随便填的)。
其中
rawMat.convertTo(depthMat, CV_8UC1, 255.0 / iMaxDepth);
- 1
加上第三个参数可以显示深度图为灰度图,不加的话则默认为二值图。
附上CMakeLists.txt:
cmake_minimum_required(VERSION 2.8)
project(Astra)
add_definitions(-std=c++11)
# 添加opencv库
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS} ${OpenCV2_INCLUDE_DIRS})
link_directories(${OpenCV_LIBRARY_DIRS})
# 添加pcl库
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
#add_definitions(${PCL_DEFINITIONS})
# 查找目录下的所有源文件 并将名称保存到 DIR_SRCS 变量
aux_source_directory(. DIR_SRCS)
# 指定生成目标
add_executable(Astra ${DIR_SRCS})
target_link_libraries (Astra ${OpenCV_LIBRARIES} ${PCL_LIBRARIES})
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
如果不用cmake,用vs配置属性表的话,可以建立两个.prop文件分别保存opencv和pcl库的配置。
opencv属性表配置(Release x64):
在VC++目录–>包含目录中加入
D:\software\opencv4.0.0\opencv\build\include
D:\software\opencv4.0.0\opencv\build\include\opencv2
- 1
- 2
在VC++目录–>库目录中加入
D:\software\opencv4.0.0\opencv\build\x64\vc14\lib
- 1
在链接器–>输入中加入
opencv_world400.lib
- 1
pcl属性表配置(Release x64):
在VC++目录–>包含目录中加入
D:\software\PCL1.8.0\include\pcl-1.8
D:\software\PCL1.8.0\3rdParty\Boost\include\boost-1_61
D:\software\PCL1.8.0\3rdParty\Eigen\eigen3
D:\software\PCL1.8.0\3rdParty\FLANN\include
D:\software\PCL1.8.0\3rdParty\Qhull\include
D:\software\PCL1.8.0\3rdParty\OpenNI2\Include
D:\software\PCL1.8.0\3rdParty\VTK\include\vtk-7.0
D:\software\PCL1.8.0\3rdParty\VTK\bin
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
在VC++目录–>库目录中加入
D:\software\PCL1.8.0\lib
D:\software\PCL1.8.0\3rdParty\VTK\lib
D:\software\PCL1.8.0\3rdParty\Boost\lib
D:\software\PCL1.8.0\3rdParty\FLANN\lib
D:\software\PCL1.8.0 \3rdParty\OpenNI2\Lib
D:\software\PCL1.8.0\3rdParty\Qhull\lib
- 1
- 2
- 3
- 4
- 5
- 6
在链接器–>输入中加入
pcl_common_release.lib
pcl_features_release.lib
pcl_filters_release.lib
pcl_io_ply_release.lib
pcl_io_release.lib
pcl_kdtree_release.lib
pcl_keypoints_release.lib
pcl_ml_release.lib
pcl_octree_release.lib
pcl_outofcore_release.lib
pcl_people_release.lib
pcl_recognition_release.lib
pcl_registration_release.lib
pcl_sample_consensus_release.lib
pcl_search_release.lib
pcl_segmentation_release.lib
pcl_stereo_release.lib
pcl_surface_release.lib
pcl_tracking_release.lib
pcl_visualization_release.lib
libboost_atomic-vc140-mt-1_61.lib
libboost_chrono-vc140-mt-1_61.lib
libboost_container-vc140-mt-1_61.lib
libboost_context-vc140-mt-1_61.lib
libboost_coroutine-vc140-mt-1_61.lib
libboost_date_time-vc140-mt-1_61.lib
libboost_exception-vc140-mt-1_61.lib
libboost_filesystem-vc140-mt-1_61.lib
libboost_graph-vc140-mt-1_61.lib
libboost_iostreams-vc140-mt-1_61.lib
libboost_locale-vc140-mt-1_61.lib
libboost_log-vc140-mt-1_61.lib
libboost_log_setup-vc140-mt-1_61.lib
libboost_math_c99-vc140-mt-1_61.lib
libboost_math_c99f-vc140-mt-1_61.lib
libboost_math_c99l-vc140-mt-1_61.lib
libboost_math_tr1-vc140-mt-1_61.lib
libboost_math_tr1f-vc140-mt-1_61.lib
libboost_math_tr1l-vc140-mt-1_61.lib
libboost_mpi-vc140-mt-1_61.lib
libboost_prg_exec_monitor-vc140-mt-1_61.lib
libboost_program_options-vc140-mt-1_61.lib
libboost_random-vc140-mt-1_61.lib
libboost_regex-vc140-mt-1_61.lib
libboost_serialization-vc140-mt-1_61.lib
libboost_signals-vc140-mt-1_61.lib
libboost_system-vc140-mt-1_61.lib
libboost_test_exec_monitor-vc140-mt-1_61.lib
libboost_thread-vc140-mt-1_61.lib
libboost_timer-vc140-mt-1_61.lib
libboost_unit_test_framework-vc140-mt-1_61.lib
libboost_wave-vc140-mt-1_61.lib
libboost_wserialization-vc140-mt-1_61.lib
OpenNI2.lib
flann.lib
flann_s.lib
flann-gd.lib
flann_cpp_s.lib
flann_cpp_s-gd.lib
flann_s-gd.lib
qhull.lib
qhull_d.lib
qhullcpp_d.lib
qhullstatic.lib
qhullstatic_d.lib
qhullstatic_r.lib
qhullstatic_r_d.lib
qhull_p.lib
qhull_p_d.lib
qhull_r.lib
qhull_r_d.lib
vtkalglib-7.0.lib
vtkChartsCore-7.0.lib
vtkCommonColor-7.0.lib
vtkCommonComputationalGeometry-7.0.lib
vtkCommonCore-7.0.lib
vtkCommonDataModel-7.0.lib
vtkCommonExecutionModel-7.0.lib
vtkCommonMath-7.0.lib
vtkCommonMisc-7.0.lib
vtkCommonSystem-7.0.lib
vtkCommonTransforms-7.0.lib
vtkDICOMParser-7.0.lib
vtkDomainsChemistry-7.0.lib
vtkexoIIc-7.0.lib
vtkexpat-7.0.lib
vtkFiltersAMR-7.0.lib
vtkFiltersCore-7.0.lib
vtkFiltersExtraction-7.0.lib
vtkFiltersFlowPaths-7.0.lib
vtkFiltersGeneral-7.0.lib
vtkFiltersGeneric-7.0.lib
vtkFiltersGeometry-7.0.lib
vtkFiltersHybrid-7.0.lib
vtkFiltersHyperTree-7.0.lib
vtkFiltersImaging-7.0.lib
vtkFiltersModeling-7.0.lib
vtkFiltersParallel-7.0.lib
vtkFiltersParallelImaging-7.0.lib
vtkFiltersProgrammable-7.0.lib
vtkFiltersSelection-7.0.lib
vtkFiltersSMP-7.0.lib
vtkFiltersSources-7.0.lib
vtkFiltersStatistics-7.0.lib
vtkFiltersTexture-7.0.lib
vtkFiltersVerdict-7.0.lib
vtkfreetype-7.0.lib
vtkGeovisCore-7.0.lib
vtkhdf5-7.0.lib
vtkhdf5_hl-7.0.lib
vtkImagingColor-7.0.lib
vtkImagingCore-7.0.lib
vtkImagingFourier-7.0.lib
vtkImagingGeneral-7.0.lib
vtkImagingHybrid-7.0.lib
vtkImagingMath-7.0.lib
vtkImagingMorphological-7.0.lib
vtkImagingSources-7.0.lib
vtkImagingStatistics-7.0.lib
vtkImagingStencil-7.0.lib
vtkInfovisCore-7.0.lib
vtkInfovisLayout-7.0.lib
vtkInteractionImage-7.0.lib
vtkInteractionStyle-7.0.lib
vtkInteractionWidgets-7.0.lib
vtkIOAMR-7.0.lib
vtkIOCore-7.0.lib
vtkIOEnSight-7.0.lib
vtkIOExodus-7.0.lib
vtkIOExport-7.0.lib
vtkIOGeometry-7.0.lib
vtkIOImage-7.0.lib
vtkIOImport-7.0.lib
vtkIOInfovis-7.0.lib
vtkIOLegacy-7.0.lib
vtkIOLSDyna-7.0.lib
vtkIOMINC-7.0.lib
vtkIOMovie-7.0.lib
vtkIONetCDF-7.0.lib
vtkIOParallel-7.0.lib
vtkIOParallelXML-7.0.lib
vtkIOPLY-7.0.lib
vtkIOSQL-7.0.lib
vtkIOVideo-7.0.lib
vtkIOXML-7.0.lib
vtkIOXMLParser-7.0.lib
vtkjpeg-7.0.lib
vtkjsoncpp-7.0.lib
vtklibxml2-7.0.lib
vtkmetaio-7.0.lib
vtkNetCDF-7.0.lib
vtkNetCDF_cxx-7.0.lib
vtkoggtheora-7.0.lib
vtkParallelCore-7.0.lib
vtkpng-7.0.lib
vtkproj4-7.0.lib
vtkRenderingAnnotation-7.0.lib
vtkRenderingContext2D-7.0.lib
vtkRenderingContextOpenGL-7.0.lib
vtkRenderingCore-7.0.lib
vtkRenderingFreeType-7.0.lib
vtkRenderingImage-7.0.lib
vtkRenderingLabel-7.0.lib
vtkRenderingLOD-7.0.lib
vtkRenderingOpenGL-7.0.lib
vtkRenderingVolume-7.0.lib
vtkRenderingVolumeOpenGL-7.0.lib
vtksqlite-7.0.lib
vtksys-7.0.lib
vtktiff-7.0.lib
vtkverdict-7.0.lib
vtkViewsContext2D-7.0.lib
vtkViewsCore-7.0.lib
vtkViewsInfovis-7.0.lib
vtkzlib-7.0.lib
opengl32.lib
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
把路径改成自己的对应安装路径即可。
若采用qt的.pro文件配置:
opencv库需要在.pro文件中加入
LIBS += D:/software/opencv4.0.0/opencv/build/x64/vc14/lib/*.lib/
INCLUDEPATH += D:/software/opencv4.0.0/opencv/build/include
DEPENDPATH += D:/software/opencv4.0.0/opencv/build/include
- 1
- 2
- 3
pcl库需要在.pro文件中加入
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\OpenNI2\include\
INCLUDEPATH += D:\software\PCL1.8.0\include\pcl-1.8\pcl
INCLUDEPATH += D:\software\PCL1.8.0\include\pcl-1.8\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\Boost\include\boost-1_61\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\Eigen\eigen3\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\FLANN\include\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\FLANN\include\flann\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\OpenNI2\Include\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\Qhull\include\
INCLUDEPATH += D:\software\PCL1.8.0\3rdParty\VTK\include\vtk-7.0
CONFIG(debug,debug|release){
LIBS += D:\software\PCL1.8.0\lib\pcl_common_debug.lib\
D:\software\PCL1.8.0\lib\pcl_features_debug.lib\
D:\software\PCL1.8.0\lib\pcl_filters_debug.lib\
D:\software\PCL1.8.0\lib\pcl_io_debug.lib\
D:\software\PCL1.8.0\lib\pcl_io_ply_debug.lib\
D:\software\PCL1.8.0\lib\pcl_kdtree_debug.lib\
D:\software\PCL1.8.0\lib\pcl_keypoints_debug.lib\
D:\software\PCL1.8.0\lib\pcl_ml_debug.lib\
D:\software\PCL1.8.0\lib\pcl_octree_debug.lib\
D:\software\PCL1.8.0\lib\pcl_outofcore_debug.lib\
D:\software\PCL1.8.0\lib\pcl_people_debug.lib\
D:\software\PCL1.8.0\lib\pcl_recognition_debug.lib\
D:\software\PCL1.8.0\lib\pcl_registration_debug.lib\
D:\software\PCL1.8.0\lib\pcl_sample_consensus_debug.lib\
D:\software\PCL1.8.0\lib\pcl_search_debug.lib\
D:\software\PCL1.8.0\lib\pcl_segmentation_debug.lib\
D:\software\PCL1.8.0\lib\pcl_stereo_debug.lib\
D:\software\PCL1.8.0\lib\pcl_surface_debug.lib\
D:\software\PCL1.8.0\lib\pcl_tracking_debug.lib\
D:\software\PCL1.8.0\lib\pcl_visualization_debug.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_atomic-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_chrono-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_container-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_context-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_coroutine-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_date_time-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_exception-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_filesystem-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_graph-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_iostreams-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_locale-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_log_setup-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_log-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99f-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99l-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1f-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1l-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_mpi-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_prg_exec_monitor-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_program_options-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_random-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_regex-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_serialization-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_signals-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_system-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_test_exec_monitor-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_thread-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_timer-vc140-mt-gd-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_type_erasure-vc140-mt-gd-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_unit_test_framework-vc140-mt-gd-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_wave-vc140-mt-gd-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_wserialization-vc140-mt-gd-1_61.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann_cpp_s-gd.lib\
D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann_s-gd.lib\
D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann-gd.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullstatic_d.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhull_d.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhull_p_d.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullcpp_d.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullstatic_r_d.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkalglib-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkChartsCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonColor-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonComputationalGeometry-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonDataModel-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonExecutionModel-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonMath-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonMisc-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonSystem-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonTransforms-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkDICOMParser-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkDomainsChemistry-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkexoIIc-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkexpat-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersAMR-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersExtraction-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersFlowPaths-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeneral-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeneric-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeometry-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersHybrid-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersHyperTree-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersImaging-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersModeling-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersParallel-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersParallelImaging-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersProgrammable-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSelection-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSMP-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSources-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersStatistics-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersTexture-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersVerdict-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkfreetype-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkGeovisCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkgl2ps-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkhdf5-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkhdf5_hl-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingColor-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingFourier-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingGeneral-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingHybrid-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingMath-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingMorphological-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingSources-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingStatistics-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingStencil-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInfovisCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInfovisLayout-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionImage-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionStyle-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionWidgets-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOAMR-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOEnSight-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOExodus-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOExport-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOGeometry-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOImage-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOImport-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOInfovis-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOLegacy-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOLSDyna-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOMINC-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOMovie-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIONetCDF-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOParallel-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOParallelXML-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOPLY-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOSQL-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOVideo-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOXML-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOXMLParser-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkjpeg-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkjsoncpp-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtklibxml2-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkmetaio-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkNetCDF-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkNetCDF_cxx-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkoggtheora-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkParallelCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkpng-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkproj4-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingAnnotation-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingContext2D-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingContextOpenGL-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingFreeType-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingGL2PS-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingImage-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLabel-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLIC-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLOD-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingOpenGL-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingVolume-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingVolumeOpenGL-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtksqlite-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtksys-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtktiff-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkverdict-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsContext2D-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsCore-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsInfovis-7.0-gd.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkzlib-7.0-gd.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\OpenNI2\Lib\OpenNI2.lib
}
else {
LIBS += D:\software\PCL1.8.0\lib\pcl_common_release.lib\
D:\software\PCL1.8.0\lib\pcl_features_release.lib\
D:\software\PCL1.8.0\lib\pcl_filters_release.lib\
D:\software\PCL1.8.0\lib\pcl_io_release.lib\
D:\software\PCL1.8.0\lib\pcl_io_ply_release.lib\
D:\software\PCL1.8.0\lib\pcl_kdtree_release.lib\
D:\software\PCL1.8.0\lib\pcl_keypoints_release.lib\
D:\software\PCL1.8.0\lib\pcl_ml_release.lib\
D:\software\PCL1.8.0\lib\pcl_octree_release.lib\
D:\software\PCL1.8.0\lib\pcl_outofcore_release.lib\
D:\software\PCL1.8.0\lib\pcl_people_release.lib\
D:\software\PCL1.8.0\lib\pcl_recognition_release.lib\
D:\software\PCL1.8.0\lib\pcl_registration_release.lib\
D:\software\PCL1.8.0\lib\pcl_sample_consensus_release.lib\
D:\software\PCL1.8.0\lib\pcl_search_release.lib\
D:\software\PCL1.8.0\lib\pcl_segmentation_release.lib\
D:\software\PCL1.8.0\lib\pcl_stereo_release.lib\
D:\software\PCL1.8.0\lib\pcl_surface_release.lib\
D:\software\PCL1.8.0\lib\pcl_tracking_release.lib\
D:\software\PCL1.8.0\lib\pcl_visualization_release.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_atomic-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_chrono-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_container-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_context-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_coroutine-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_date_time-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_exception-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_filesystem-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_graph-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_iostreams-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_locale-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_log_setup-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_log-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99f-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99l-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_c99-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1f-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1l-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_math_tr1-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_mpi-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_prg_exec_monitor-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_program_options-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_random-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_regex-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_serialization-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_signals-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_system-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_test_exec_monitor-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_thread-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_timer-vc140-mt-1_61.lib\
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_type_erasure-vc140-mt-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_unit_test_framework-vc140-mt-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_wave-vc140-mt-1_61.lib
D:\software\PCL1.8.0\3rdParty\Boost\lib\libboost_wserialization-vc140-mt-1_61.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann_cpp_s.lib\
D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann_s.lib\
D:\software\PCL1.8.0\3rdParty\FLANN\lib\flann.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullstatic.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhull.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhull_p.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullcpp.lib\
D:\software\PCL1.8.0\3rdParty\Qhull\lib\qhullstatic_r_d.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkalglib-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkChartsCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonColor-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonComputationalGeometry-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonDataModel-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonExecutionModel-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonMath-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonMisc-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonSystem-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkCommonTransforms-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkDICOMParser-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkDomainsChemistry-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkexoIIc-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkexpat-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersAMR-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersExtraction-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersFlowPaths-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeneral-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeneric-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersGeometry-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersHybrid-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersHyperTree-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersImaging-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersModeling-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersParallel-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersParallelImaging-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersProgrammable-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSelection-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSMP-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersSources-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersStatistics-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersTexture-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkFiltersVerdict-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkfreetype-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkGeovisCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkgl2ps-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkhdf5-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkhdf5_hl-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingColor-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingFourier-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingGeneral-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingHybrid-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingMath-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingMorphological-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingSources-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingStatistics-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkImagingStencil-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInfovisCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInfovisLayout-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionImage-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionStyle-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkInteractionWidgets-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOAMR-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOEnSight-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOExodus-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOExport-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOGeometry-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOImage-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOImport-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOInfovis-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOLegacy-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOLSDyna-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOMINC-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOMovie-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIONetCDF-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOParallel-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOParallelXML-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOPLY-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOSQL-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOVideo-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOXML-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkIOXMLParser-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkjpeg-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkjsoncpp-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtklibxml2-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkmetaio-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkNetCDF-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkNetCDF_cxx-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkoggtheora-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkParallelCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkpng-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkproj4-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingAnnotation-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingContext2D-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingContextOpenGL-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingFreeType-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingGL2PS-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingImage-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLabel-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLIC-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingLOD-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingOpenGL-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingVolume-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkRenderingVolumeOpenGL-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtksqlite-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtksys-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtktiff-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkverdict-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsContext2D-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsCore-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkViewsInfovis-7.0.lib\
D:\software\PCL1.8.0\3rdParty\VTK\lib\vtkzlib-7.0.lib
LIBS+= D:\software\PCL1.8.0\3rdParty\OpenNI2\Lib\OpenNI2.lib
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
Linux系统下开发(ubuntu16.04)
首先按照官网安装Linux的SDK,即AstraSDK和OpenNI-Linux-x64-2.3。
python开发环境搭建
测试程序同win下的python版本。
注意每次打开新终端都需要先在OpenNI-Linux-x64-2.3文件夹下source一下
$ source OpenNIDevEnvironment
- 1
或者打开终端并输入:
$ sudo gedit ~/.bashrc
- 1
在.bashrc文件末尾添加(需要改成自己的相应路径)
export OPENNI2_INCLUDE=/home/smart/OpenNI-Linux-x64-2.3/Include
export OPENNI2_REDIST=/home/smart/OpenNI-Linux-x64-2.3/Redist
- 1
- 2
来永久设置用户环境变量。
再在终端输入
$ source ~/.bashrc
- 1
或者重启使环境变量生效。
C++开发环境搭建
配置环境:opencv3.4.0 pcl1.7 openni2.3
其中pcl是通过
$ sudo apt-get install libpcl-dev
- 1
直接安装的(但是好像只能装1.7的版本,之前编译高版本的两个多小时结果报错。。奔溃)。opencv还没发现简单安装方法,只能从源码编译。 opencv可以通过源码编译安装或者sudo apt install libopencv-dev 安装。
测试程序同win。若库安装和环境变量配置正确,在源码路径下直接
$ mkdir build
$ cd build
$ cmake ..
$ make
$ ./Astra
- 1
- 2
- 3
- 4
- 5
不出意外的话则可以生成可执行文件,运行程序即可。
最后上一张效果图,相机放桌上随便拍的天花板。
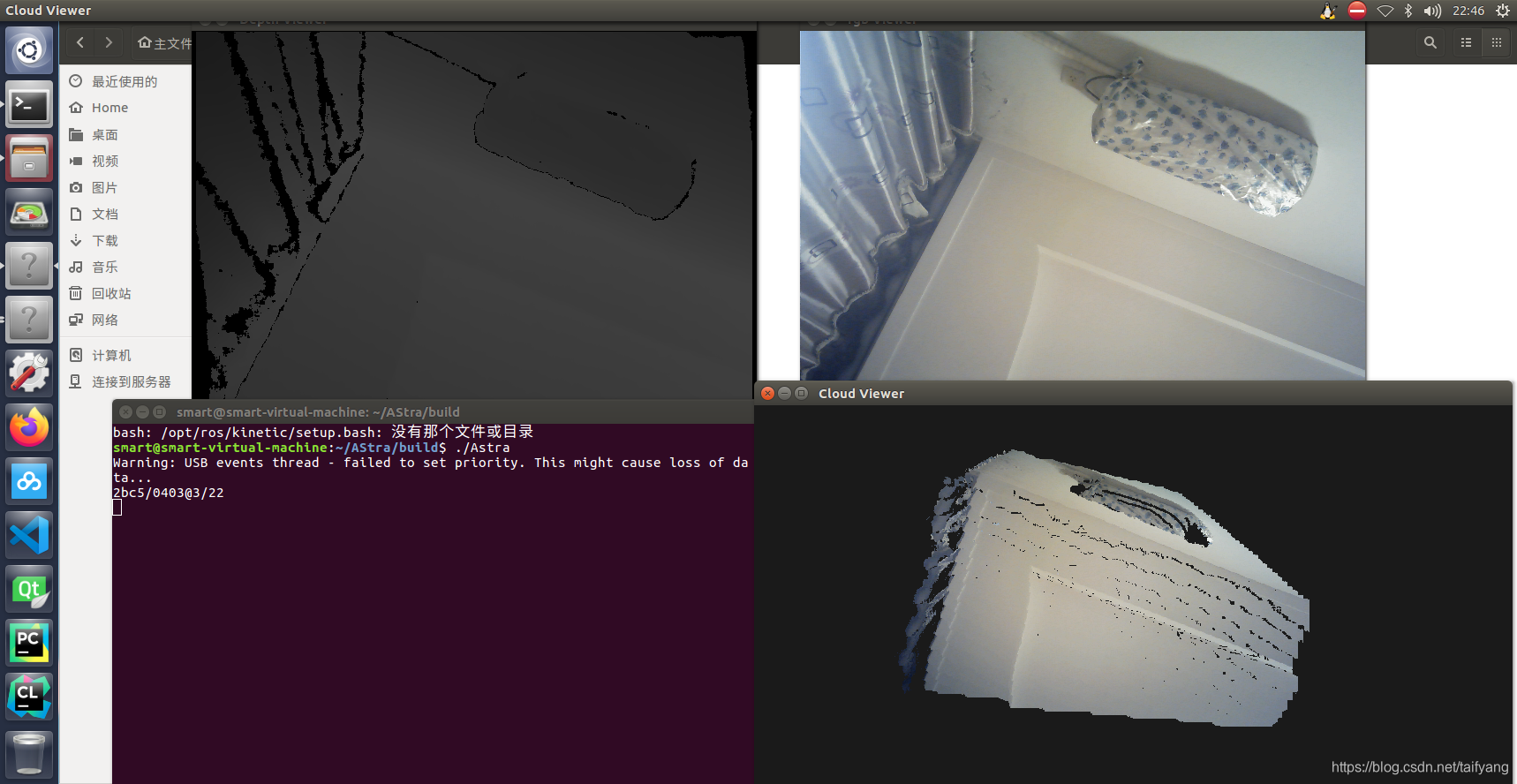
后来我又自己用Qt撸了一个简单的界面:
乐视三合一体感摄像头Astra pro开发记录2(Qt界面)
参考:
python通过openni获取奥比中光Astra Pro的深度值和RGB图像
关于奥比中光OpenNI SDK的环境配置问题

