
- 1计算机网络(就业向总复习)_状态机 关闭到故障
- 2python utf-8 codec cant decode_python3使用beautifulSoup - UnicodeDecodeError: 'utf-8' codec can't deco...
- 3索引量是什么?如何提升网站索引量?
- 4不加班的程序员有更多的可能性_不想加班的程序员适合深圳吗 site:blog.csdn.net
- 5我的2022年终总结_csdn2022年终总结嘛在哪看
- 6基于JAVA房产销售平台计算机毕业设计源码+系统+lw文档+部署
- 7猴子吃桃问题:猴子第一天摘下若干个桃子,当即吃了一半,还不瘾,又多吃了一个,第二天早上又将剩下的桃子吃掉一半,又多吃了一个。 以后每天早上都吃了前一天剩下的一半零一个。到第10天早上想再吃时,见只剩下_1152: 猴子吃桃问题
- 8AI预测福彩3D第8弹【2024年3月14日预测--新算法重新开始计算第五次测试】_用ai技术可以预测3d号码吗
- 9用copilot,急需激活Idea2023.3以上版本_idea2023coplit
- 102020年“金九银十”的面试宝典:腾讯,字节等大厂面试真题汇总_“金九银十”一线大厂面试专题
四元数与欧拉角(RPY角)的相互转换_四元数转欧拉角
赞
踩
https://www.cnblogs.com/21207-iHome/p/6894128.html
- RPY角与Z-Y-X欧拉角
描述坐标系{B}相对于参考坐标系{A}的姿态有两种方式。第一种是绕固定(参考)坐标轴旋转:假设开始两个坐标系重合,先将{B}绕{A}的X轴旋转γγ,然后绕{A}的Y轴旋转ββ,最后绕{A}的Z轴旋转αα,就能旋转到当前姿态。可以称其为X-Y-Z fixed angles或RPY角(Roll, Pitch, Yaw)。
Roll:横滚

Pitch: 俯仰
Yaw: 偏航(航向)
由于是绕固定坐标系旋转,则旋转矩阵为(cαcα is shorthand for cosαcosα, sαsα is shorthand for sinαsinα,and so on.)
RXYZ(γ,β,α)=RZ(α)RY(β)RX(γ)=⎡⎣⎢⎢cαcβsαcβ−sβcαsβsγ−sαcγsαsβsγ+cαcγcβsγcαsβcγ+sαsγsαsβcγ−cαsγcβcγ⎤⎦⎥⎥RXYZ(γ,β,α)=RZ(α)RY(β)RX(γ)=[cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ]
另一种姿态描述方式是绕自身坐标轴旋转:假设开始两个坐标系重合,先将{B}绕自身的Z轴旋转αα,然后绕Y轴旋转ββ,最后绕X轴旋转γγ,就能旋转到当前姿态。称其为Z-Y-X欧拉角,由于是绕自身坐标轴进行旋转,则旋转矩阵为:
RZ′Y′X′(α,β,γ)=RZ(α)RY(β)RX(γ)=⎡⎣⎢⎢cαcβsαcβ−sβcαsβsγ−sαcγsαsβsγ+cαcγcβsγcαsβcγ+sαsγsαsβcγ−cαsγcβcγ⎤⎦⎥⎥RZ′Y′X′(α,β,γ)=RZ(α)RY(β)RX(γ)=[cαcβcαsβsγ−sαcγcαsβcγ+sαsγsαcβsαsβsγ+cαcγsαsβcγ−cαsγ−sβcβsγcβcγ]
可以发现这两种描述方式得到的旋转矩阵是一样的,即绕固定坐标轴X-Y-Z旋转(γ,β,α)(γ,β,α)和绕自身坐标轴Z-Y-X旋转(α,β,γ)(α,β,γ)的最终结果一样,只是描述的方法有差别而已。In gerenal: three rotations taken about fixed axes yield the same final orientation as the same three rotations taken in opposite order about the axes of the moving frame.
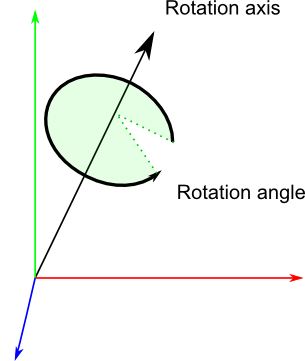
- Axis-Angle与四元数
绕坐标轴的多次旋转可以等效为绕某一转轴旋转一定的角度。假设等效旋转轴方向向量为K⃗ =[kx,ky,kz]TK→=[kx,ky,kz]T,等效旋转角为θθ,则四元数q=(x,y,z,w)q=(x,y,z,w),其中:
xyzw=kx⋅sinθ2=ky⋅sinθ2=kz⋅sinθ2=cosθ2x=kx⋅sinθ2y=ky⋅sinθ2z=kz⋅sinθ2w=cosθ2
且有x2+y2+z2+w2=1x2+y2+z2+w2=1
即四元数存储了旋转轴和旋转角的信息,它能方便的描述刚体绕任意轴的旋转。
四元数转换为旋转矩阵:
R=⎡⎣⎢⎢⎢1−2y2−2z22(xy+zw)2(xz−yw)2(xy−zw)1−2x2−2z22(yz+xw)2(xz+yw)2(yz−xw)1−2x2−2y2⎤⎦⎥⎥⎥R=[1−2y2−2z22(xy−zw)2(xz+yw)2(xy+zw)1−2x2−2z22(yz−xw)2(xz−yw)2(yz+xw)1−2x2−2y2]
已知旋转矩阵为:

则对应的四元数为:

- 四元数与欧拉角的相互转换
定义两个四元数:
![]()
![]()
其中![]() 表示矢量
表示矢量
![]()
;而
![]()
表示矢量
![]()
四元数加法:
跟复数、向量和矩阵一样,两个四元数之和需要将不同的元素加起来。
![]()
加法遵循实数和复数的所有交换律和结合律。
四元数乘法:
四元数的乘法的意义类似于矩阵的乘法,可以表示旋转的合成。当有多次旋转操作时,使用四元数可以获得更高的计算效率。
![]()
![]()
由于四元数乘法的非可换性,pq并不等于qp,qp乘积的向量部分是:
![]()
Mathematica中有四元数相关的程序包Quaternions Package,需要先导入才能使用。下面计算了三个四元数的乘积:
<<Quaternions` (* This loads the package *) Quaternion[2, 1, 1, 3] ** Quaternion[2, 1, 1, 0] ** Quaternion[1, 1, 1, 1] (* Be sure to use ** rather than * when multiplying quaternions *)
计算结果为:Quaternion[-12, 4, 14, 2]
那么将Z-Y-X欧拉角(或RPY角:绕固定坐标系的X-Y-Z依次旋转αα,ββ,γγ角)转换为四元数:
q=⎡⎣⎢⎢⎢⎢⎢cosγ200sinγ2⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢⎢cosβ20sinβ20⎤⎦⎥⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢cosα2sinα200⎤⎦⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢⎢⎢cosα2cosβ2cosγ2+sinα2sinβ2sinγ2sinα2cosβ2cosγ2−cosα2sinβ2sinγ2cosα2sinβ2cosγ2+sinα2cosβ2sinγ2cosα2cosβ2sinγ2−sinα2sinβ2cosγ2⎤⎦⎥⎥⎥⎥⎥⎥q=[cosγ200sinγ2][cosβ20sinβ20][cosα2sinα200]=[cosα2cosβ2cosγ2+sinα2sinβ2sinγ2sinα2cosβ2cosγ2−cosα2sinβ2sinγ2cosα2sinβ2cosγ2+sinα2cosβ2sinγ2cosα2cosβ2sinγ2−sinα2sinβ2cosγ2]
根据上面的公式可以求出逆解,即由四元数q=(q0,q1,q2,q3)q=(q0,q1,q2,q3)或q=(w,x,y,z)q=(w,x,y,z)到欧拉角的转换为:
⎡⎣⎢⎢αβγ⎤⎦⎥⎥=⎡⎣⎢⎢⎢⎢arctan2(q0q1+q2q3)1−2(q21+q22)arcsin(2(q0q2−q1q3))arctan2(q0q3+q1q2)1−2(q22+q23)⎤⎦⎥⎥⎥⎥[αβγ]=[arctan2(q0q1+q2q3)1−2(q12+q22)arcsin(2(q0q2−q1q3))arctan2(q0q3+q1q2)1−2(q22+q32)]
由于arctan和arcsin的取值范围在−π2−π2和π2π2之间,只有180°,而绕某个轴旋转时范围是360°,因此要使用atan2函数代替arctan函数:
⎡⎣⎢⎢αβγ⎤⎦⎥⎥=⎡⎣⎢⎢⎢atan2(2(q0q1+q2q3),1−2(q21+q22))arcsin(2(q0q2−q1q3))atan2(2(q0q3+q1q2),1−2(q22+q23))⎤⎦⎥⎥⎥[αβγ]=[atan2(2(q0q1+q2q3),1−2(q12+q22))arcsin(2(q0q2−q1q3))atan2(2(q0q3+q1q2),1−2(q22+q32))]
对于tan(θ) = y / x :
θ = ATan(y / x)求出的θ取值范围是[-PI/2, PI/2];
θ = ATan2(y, x)求出的θ取值范围是[-PI, PI]。
-
当 (x, y) 在第一象限, 0 < θ < PI/2
-
当 (x, y) 在第二象限 PI/2 < θ≤PI
-
当 (x, y) 在第三象限, -PI < θ < -PI/2
-
当 (x, y) 在第四象限, -PI/2 < θ < 0
将四元数转换为欧拉角可以参考下面的代码。需要注意欧拉角有12种旋转次序,而上面推导的公式是按照Z-Y-X顺序进行的,所以有时会在网上看到不同的转换公式(因为对应着不同的旋转次序),在使用时一定要注意旋转次序是什么。比如ADAMS软件里就默认Body 3-1-3次序,即Z-X-Z欧拉角,而VREP中则按照X-Y-Z欧拉角旋转。
enum RotSeq{zyx, zyz, zxy, zxz, yxz, yxy, yzx, yzy, xyz, xyx, xzy,xzx};


// COMPILE: g++ -o quat2EulerTest quat2EulerTest.cpp
#include <iostream>
#include <cmath>
using namespace std;
///
// Quaternion struct
// Simple incomplete quaternion struct for demo purpose
///
struct Quaternion{
Quaternion():x(0), y(0), z(0), w(1){};
Quaternion(double x, double y, double z, double w):x(x), y(y), z(z), w(w){};
void normalize(){
double norm = std::sqrt(x*x + y*y + z*z + w*w);
x /= norm;
y /= norm;
z /= norm;
w /= norm;
}
double norm(){
return std::sqrt(x*x + y*y + z*z + w*w);
}
double x;
double y;
double z;
double w;
};
///
// Quaternion to Euler
///
enum RotSeq{zyx, zyz, zxy, zxz, yxz, yxy, yzx, yzy, xyz, xyx, xzy,xzx};
void twoaxisrot(double r11, double r12, double r21, double r31, double r32, double res[]){
res[0] = atan2( r11, r12 );
res[1] = acos ( r21 );
res[2] = atan2( r31, r32 );
}
void threeaxisrot(double r11, double r12, double r21, double r31, double r32, double res[]){
res[0] = atan2( r31, r32 );
res[1] = asin ( r21 );
res[2] = atan2( r11, r12 );
}
void quaternion2Euler(const Quaternion& q, double res[], RotSeq rotSeq)
{
switch(rotSeq){
case zyx:
threeaxisrot( 2*(q.x*q.y + q.w*q.z),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
-2*(q.x*q.z - q.w*q.y),
2*(q.y*q.z + q.w*q.x),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
res);
break;
case zyz:
twoaxisrot( 2*(q.y*q.z - q.w*q.x),
2*(q.x*q.z + q.w*q.y),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
2*(q.y*q.z + q.w*q.x),
-2*(q.x*q.z - q.w*q.y),
res);
break;
case zxy:
threeaxisrot( -2*(q.x*q.y - q.w*q.z),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
2*(q.y*q.z + q.w*q.x),
-2*(q.x*q.z - q.w*q.y),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
res);
break;
case zxz:
twoaxisrot( 2*(q.x*q.z + q.w*q.y),
-2*(q.y*q.z - q.w*q.x),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
2*(q.x*q.z - q.w*q.y),
2*(q.y*q.z + q.w*q.x),
res);
break;
case yxz:
threeaxisrot( 2*(q.x*q.z + q.w*q.y),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
-2*(q.y*q.z - q.w*q.x),
2*(q.x*q.y + q.w*q.z),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
res);
break;
case yxy:
twoaxisrot( 2*(q.x*q.y - q.w*q.z),
2*(q.y*q.z + q.w*q.x),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
2*(q.x*q.y + q.w*q.z),
-2*(q.y*q.z - q.w*q.x),
res);
break;
case yzx:
threeaxisrot( -2*(q.x*q.z - q.w*q.y),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
2*(q.x*q.y + q.w*q.z),
-2*(q.y*q.z - q.w*q.x),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
res);
break;
case yzy:
twoaxisrot( 2*(q.y*q.z + q.w*q.x),
-2*(q.x*q.y - q.w*q.z),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
2*(q.y*q.z - q.w*q.x),
2*(q.x*q.y + q.w*q.z),
res);
break;
case xyz:
threeaxisrot( -2*(q.y*q.z - q.w*q.x),
q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z,
2*(q.x*q.z + q.w*q.y),
-2*(q.x*q.y - q.w*q.z),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
res);
break;
case xyx:
twoaxisrot( 2*(q.x*q.y + q.w*q.z),
-2*(q.x*q.z - q.w*q.y),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
2*(q.x*q.y - q.w*q.z),
2*(q.x*q.z + q.w*q.y),
res);
break;
case xzy:
threeaxisrot( 2*(q.y*q.z + q.w*q.x),
q.w*q.w - q.x*q.x + q.y*q.y - q.z*q.z,
-2*(q.x*q.y - q.w*q.z),
2*(q.x*q.z + q.w*q.y),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
res);
break;
case xzx:
twoaxisrot( 2*(q.x*q.z - q.w*q.y),
2*(q.x*q.y + q.w*q.z),
q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z,
2*(q.x*q.z + q.w*q.y),
-2*(q.x*q.y - q.w*q.z),
res);
break;
default:
std::cout << "Unknown rotation sequence" << std::endl;
break;
}
}
///
// Helper functions
///
Quaternion operator*(Quaternion& q1, Quaternion& q2){
Quaternion q;
q.w = q1.w*q2.w - q1.x*q2.x - q1.y*q2.y - q1.z*q2.z;
q.x = q1.w*q2.x + q1.x*q2.w + q1.y*q2.z - q1.z*q2.y;
q.y = q1.w*q2.y - q1.x*q2.z + q1.y*q2.w + q1.z*q2.x;
q.z = q1.w*q2.z + q1.x*q2.y - q1.y*q2.x + q1.z*q2.w;
return q;
}
ostream& operator <<(std::ostream& stream, const Quaternion& q) {
cout << q.w << " "<< showpos << q.x << "i " << q.y << "j " << q.z << "k";
cout << noshowpos;
}
double rad2deg(double rad){
return rad*180.0/M_PI;
}
///
// Main
///
int main(){
Quaternion q; // x,y,z,w
Quaternion qx45(sin(M_PI/8), 0,0, cos(M_PI/8) );
Quaternion qy45(0, sin(M_PI/8), 0, cos(M_PI/8));
Quaternion qz45(0, 0, sin(M_PI/8), cos(M_PI/8));
Quaternion qx90(sin(M_PI/4), 0,0, cos(M_PI/4) );
Quaternion qy90(0, sin(M_PI/4), 0, cos(M_PI/4));
Quaternion qz90(0, 0, sin(M_PI/4), cos(M_PI/4));
double res[3];
q = qz45*qx45;
q.normalize();
quaternion2Euler(q, res, zyx);
cout << "Rotation sequence: X->Y->Z" << endl;
cout << "x45 -> z45" << endl;
cout << "q: " << q << endl;
cout << "x: " << rad2deg(res[0]) << " y: " << rad2deg(res[1]) << " z: " << rad2deg(res[2]) << endl << endl;
q = qz90*qx90;
q.normalize();
quaternion2Euler(q, res, zyx);
cout << "Rotation sequence: X->Y->Z" << endl;
cout << "x90 -> z90" << endl;
cout << "q: " << q << endl;
cout << "x: " << rad2deg(res[0]) << " y: " << rad2deg(res[1]) << " z: " << rad2deg(res[2]) << endl << endl;
q = qx90*qz90;
q.normalize();
quaternion2Euler(q, res, xyz);
cout << "Rotation sequence: Z->Y->X" << endl;
cout << "z90 -> x90" << endl;
cout << "q: " << q << endl;
cout << "x: " << rad2deg(res[0]) << " y: " << rad2deg(res[1]) << " z: " << rad2deg(res[2]) << endl;
}
上面的代码存在一个问题,即奇异性没有考虑。下面看一种特殊的情况(参考Maths - Conversion Quaternion to Euler):假设一架飞机绕Y轴旋转了90°(俯仰角pitch=90),机头垂直向上,此时如何计算航向角和横滚角?

这时会发生自由度丢失的情况,即Yaw和Roll会变为一个自由度。此时再使用上面的公式根据四元数计算欧拉角会出现问题:
arcsin(2(q0q2−q1q3))arcsin(2(q0q2−q1q3))的定义域为[−1,1][−1,1],因此(q0q2−q1q3)∈[−0.5,0.5](q0q2−q1q3)∈[−0.5,0.5],当q0q2−q1q3=0.5q0q2−q1q3=0.5时(在程序中浮点数不能直接进行等于判断,要使用合理的阈值),俯仰角ββ为90°,将其带入正向公式计算出四元数(q0,q1,q2,q3)(q0,q1,q2,q3),然后可以发现逆向公式中atan2函数中的参数全部为0,即出现了0000的情况!无法计算。
β=π/2β=π/2时,sinβ2=cosβ2=0.707sinβ2=cosβ2=0.707,将其带入公式中有
q=⎡⎣⎢⎢⎢⎢wxyz⎤⎦⎥⎥⎥⎥⎡⎣⎢⎢⎢⎢⎢0.707(cosα2cosγ2+sinα2sinγ2)0.707(sinα2cosγ2−cosα2sinγ2)0.707(cosα2cosγ2+sinα2sinγ2)0.707(cosα2sinγ2−sinα2cosγ2)⎤⎦⎥⎥⎥⎥⎥=⎡⎣⎢⎢⎢⎢⎢⎢0.707cosα−γ20.707sinα−γ20.707cosα−γ20.707sinα−γ2⎤⎦⎥⎥⎥⎥⎥⎥q=[wxyz][0.707(cosα2cosγ2+sinα2sinγ2)0.707(sinα2cosγ2−cosα2sinγ2)0.707(cosα2cosγ2+sinα2sinγ2)0.707(cosα2sinγ2−sinα2cosγ2)]=[0.707cosα−γ20.707sinα−γ20.707cosα−γ20.707sinα−γ2]
则xw=zy=tanα−γ2xw=zy=tanα−γ2,于是有
α−γ=2⋅atan2(x,w)α−γ=2⋅atan2(x,w)
通常令α=0α=0,这时γ=−2⋅atan2(x,w)γ=−2⋅atan2(x,w)。可以进行验证:当四元数为(w,x,y,z)=(0.653,-0.271,0.653,0.271)时,根据这些规则计算出来的ZYX欧拉角为α=0°,β=90°,γ=45°

当俯仰角为-90°,即机头竖直向下时的情况也与之类似,可以推导出奇异姿态时的计算公式。比较完整的四元数转欧拉角(Z-Y-X order)的代码如下:
CameraSpacePoint QuaternionToEuler(Vector4 q) // Z-Y-X Euler angles
{
CameraSpacePoint euler = { 0 };
const double Epsilon = 0.0009765625f;
const double Threshold = 0.5f - Epsilon;
double TEST = q.w*q.y - q.x*q.z;
if (TEST < -Threshold || TEST > Threshold) // 奇异姿态,俯仰角为±90°
{
int sign = Sign(TEST);
euler.Z = -2 * sign * (double)atan2(q.x, q.w); // yaw
euler.Y = sign * (PI / 2.0); // pitch
euler.X = 0; // roll
}
else
{
euler.X = atan2(2 * (q.y*q.z + q.w*q.x), q.w*q.w - q.x*q.x - q.y*q.y + q.z*q.z);
euler.Y = asin(-2 * (q.x*q.z - q.w*q.y));
euler.Z = atan2(2 * (q.x*q.y + q.w*q.z), q.w*q.w + q.x*q.x - q.y*q.y - q.z*q.z);
}
return euler;
}
在DirectXMath Library中有许多与刚体姿态变换相关的函数可以直接调用:
- 四元数乘法:XMQuaternionMultiply method --Computes the product of two quaternions.
- 旋转矩阵转四元数:XMQuaternionRotationMatrix method --Computes a rotation quaternion from a rotation matrix.
- 四元数转旋转矩阵:XMMatrixRotationQuaternion method -- Builds a rotation matrix from a quaternion.
- 欧拉角转四元数:XMQuaternionRotationRollPitchYaw method --Computes a rotation quaternion based on the pitch, yaw, and roll (Euler angles).
- 四元数转Axis-Angle:XMQuaternionToAxisAngle method --Computes an axis and angle of rotation about that axis for a given quaternion.
- 欧拉角转旋转矩阵:XMMatrixRotationRollPitchYaw method --Builds a rotation matrix based on a given pitch, yaw, and roll (Euler angles).
- Axis-Angle转旋转矩阵:XMMatrixRotationAxis method --Builds a matrix that rotates around an arbitrary axis.
- 构造绕X/Y/Z轴的旋转矩阵:XMMatrixRotationX method --Builds a matrix that rotates around the x-axis.(Angles are measured clockwise when looking along the rotation axis toward the origin)
下面的代码中坐标系绕X轴旋转90°(注意这里不是按照右手定则的方向,而是沿着坐标轴向原点看过去以顺时针方式旋转,因此与传统的右手定则刚好方向相反),来进行变换:
 View Code
View Code
结果如下图所示:

参考:
DirectXMath Library Quaternion Functions
Convert quaternion to euler rotations
Conversion between quaternions and Euler angles
Maths - Conversion Quaternion to Euler
Coordinate Transformations in Robotics—MATLAB
Introduction to Robotics - Mechanics and Control. Chapter 2 Spatial descriptions and transformations
- 创建a标签下载的方式,
[详细] -->赞
踩

