
- 1机器学习原来如此有趣:如何故意欺骗神经网络
- 2leetcode 1. Two Sum (c++)_class solution { public: vector
twosum(vector - 3深度学习之图像分类(十二)Masked Autoencoders Are Scalable Vision Learners(MAE)详解
- 4数据结构----顺序表
- 5[转]C/C++中产生随机数(rand,srand用法)
- 6八大排序算法——希尔(shell)排序(动图演示 思路分析 实例代码java 复杂度分析)_希尔排序动态演示
- 7仓库管理系统源代码集合,带图片展示和网站演示_仓库管理系统源码
- 8C语言实现简单的哈希表_c语言 哈希表 不用malloc
- 9CKS之k8s安全基准工具:kube-bench(1),2024年最新网络安全岗面试必问
- 10Java中高级核心知识全面解析——常用框架_为什么使用ioc 思想的开发方式 :不通过 new 关键字
STM32控制MPU6050_iic_read_len
赞
踩
STM32控制MPU6050
1.硬件连接
实验采用正点原子公司的 AN1507 ATK-MPU6050 六轴传感器模块
- MPU6050 STM32
- VCC <---> VCC
- GND <---> GND
- SDA <---> PB9
- SCL <---> PB8
- INT <---> 不接
- AD0 <---> 不接
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
2. 重要寄存器
2.1 电源管理寄存器 1

DEVICE_RESET 位用来控制复位,设置为 1,复位 MPU6050,复位结束后, MPU
硬件自动清零该位
SLEEEP 位用于控制 MPU6050 的工作模式,复位后,该位为 1,即进
入了睡眠模式(低功耗),所以我们要清零该位,以进入正常工作模式
TEMP_DIS 用于设置是否使能温度传感器,设置为 0,则使能
CLKSEL[2:0]用于选择系统时钟源,选择关系如表
| CLKSEL[2:0] | 时钟源 |
|---|---|
| 000 | 内部 8M RC 晶振 |
| 001 | PLL,使用 X 轴陀螺作为参考 |
| 010 | PLL,使用 Y 轴陀螺作为参考 |
| 011 | PLL,使用 Z 轴陀螺作为参考 |
| 100 | PLL,使用外部 32.768Khz 作为参考 |
| 101 | PLL,使用外部 19.2Mhz 作为参考 |
| 110 | 保留 |
| 111 | 关闭时钟,保持时序产生电路复位状态 |
**默认是使用内部 8M RC 晶振的,精度不高,所以我们一般选择 X/Y/Z 轴陀螺作为参考
的 PLL 作为时钟源,一般设置 CLKSEL=001 即可**
2.2 陀螺仪配置寄存器

FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围: 0,±250°
/S; 1,±500° /S; 2,±1000° /S; 3,±2000° /S;我们一般设置为 3,即±2000° /S,因
为陀螺仪的 ADC 为 16 位分辨率,所以得到灵敏度为: 65536/4000=16.4LSB/(° /S)
2.3 加速度传感器配置寄存器

AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围: 0,
±2g; 1,±4g; 2,±8g; 3,±16g;我们一般设置为 0,即±2g,因为加速度传感器的
ADC 也是 16 位,所以得到灵敏度为: 65536/4=16384LSB/g
2.4 FIFO使能寄存器

该寄存器用于控制 FIFO 使能,在简单读取传感器数据的时候,可以不用 FIFO,设置
对应位为 0 即可禁止 FIFO,设置为 1,则使能 FIFO
加速度传感器的 3 个轴,全由 1
个位( ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启 FIFO
2.5 陀螺仪采样率分频寄存器

该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)
这里陀螺仪的输出频率,是 1Khz 或者 8Khz,与数字低通滤波器( DLPF)的设置有关,
当 DLPF_CFG=0/7 的时候,频率为 8Khz,其他情况是 1Khz。而且 DLPF 滤波频率一般设置
为采样率的一半。采样率,我们假定设置为 50Hz,那么 SMPLRT_DIV=1000/50-1=19
2.6 配置寄存器

数字低通滤波器( DLPF)的设置位,即: DLPF_CFG[2:0],加速
度计和陀螺仪,都是根据这三个位的配置进行过滤的。 DLPF_CFG 不同配置对应的过滤情
况如表:
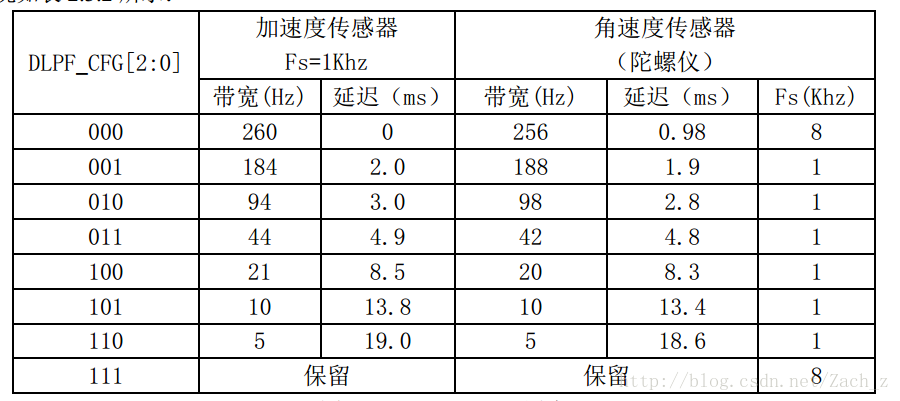
这里的加速度传感器,输出速率( Fs)固定是 1Khz,而角速度传感器的输出速率( Fs),
则根据 DLPF_CFG 的配置有所不同。一般我们设置角速度传感器的带宽为其采样率的一半,
如前面所说的,如果设置采样率为 50Hz,那么带宽就应该设置为 25Hz,取近似值 20Hz,
就应该设置 DLPF_CFG=100
2.7 电源管理寄存器 2

LP_WAKE_CTRL 用于控制低功耗时的唤醒频率
剩下的 6 位,分别控制加速度和陀螺仪的x/y/z轴是否进入待机模式,这里我们全部都不进入待机模式,所以全部设置为 0 即可
2.8 陀螺仪数据输出寄存器
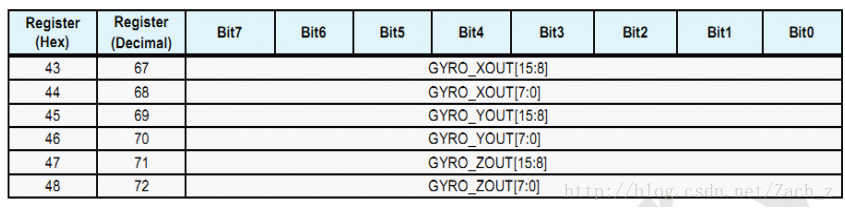
通过读取这6个寄存器,就可以读到陀螺仪 x/y/z 轴的值,比如 x 轴的数据,可以通过读取
0X43(高 8 位)和 0X44(低 8 位)寄存器得到,其他轴以此类推
2.9 加速度传感器数据输出寄存器
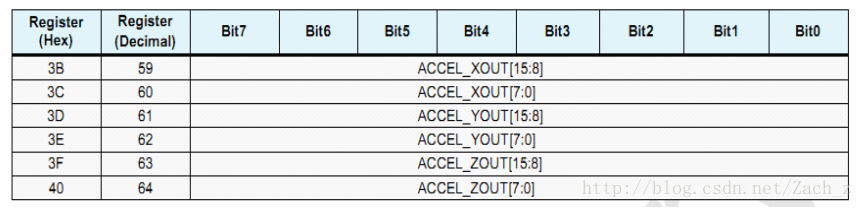
通过读取这6个寄存器,就可以读到加速度传感器 x/y/z 轴的值,比如读 x 轴的数据,可以通过读取 0X3B(高 8 位)和0X3C(低8位)寄存器得到,其他轴以此类推
2.10 温度传感器数据输出寄存器
温度传感器的值,可以通过读取 0X41(高 8 位)和 0X42(低 8 位)寄存器得到,
温度换算公式为:
Temperature = 36.53 + regval/340
其中, Temperature 为计算得到的温度值,单位为℃, regval 为从 0X41 和 0X42 读到的
温度传感器值
2.11 中断使能寄存器

OT_EN 该位置 1,该位使能运动检测(Motiondetection)产生中断。
FIFO_OFLOW_EN该位置1,该位使能FIFO缓冲区溢出产生中断。
I2C_MST_INT_EN该位置1,该位使能I2C主机所有中断源产生中断。
DATA_RDY_EN 该位置 1,该位使能数据就绪中断( Data Ready interrupt),所有的传感器寄存器写操作完成时都会产生
关闭所有中断则给此寄存器赋值0X00
3. 软件驱动
3.1 通过IIC对MPU6050寄存器进行读写
- //IIC写一个字节
- //reg: 寄存器地址
- //data: 数据
- //返回值: 0,正常
- // 其他,错误代码
- u8 IIC_Write_Byte(u8 reg,u8 data)
- {
- IIC_Start();
- IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
- if(IIC_Wait_Ack()) //等待应答
- {
- IIC_Stop();
- return 1;
- }
- IIC_Send_Byte(reg); //写寄存器地址
- IIC_Wait_Ack(); //等待应答
- IIC_Send_Byte(data);//发送数据
- if(IIC_Wait_Ack()) //等待ACK
- {
- IIC_Stop();
- return 1;
- }
- IIC_Stop();
- return 0;
- }
-
- //IIC读一个字节
- //reg:寄存器地址
- //返回值:读到的数据
-
- u8 IIC_Read_Byte(u8 reg)
- {
- u8 res;
- IIC_Start();
- IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
- IIC_Wait_Ack();//等待应答
- IIC_Send_Byte(reg);//写寄存器地址
- IIC_Wait_Ack();//等待应答
- IIC_Start();
- IIC_Send_Byte((MPU_ADDR<<1)|1);//发送期间地址+读命令
- IIC_Wait_Ack();//等待应答
- res=IIC_Read_Byte(0);//读取数据,发送nACK
- IIC_Stop();//产生一个停止条件
- return res;
- }
-
- //IIC连续写
- //addr:器件地址
- //reg: 寄存器地址
- //len: 写入长度
- //buf: 数据区
- //返回值: 0,正常
- // 其他,错误代码
- u8 IIC_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
- {
- u8 i;
- IIC_Start();
- IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
- if(IIC_Wait_Ack())//等待应答
- {
- IIC_Stop();
- return 1;
- }
- IIC_Send_Byte(reg);//写寄存器地址
- IIC_Wait_Ack();//等待应答
- for(i=0;i<len;i++)
- {
- IIC_Send_Byte(buf[i]);//发送数据
- if(IIC_Wait_Ack())//等待ACK
- {
- IIC_Stop();
- return 1;
- }
- }
- IIC_Stop();
- return 0;
- }
- //IIC连续读
- //addr:器件地址
- //reg:要读取的寄存器地址
- //len:要读取得长度
- //buf:读取到的数据存储区
- //返回值: 0,正常
- // 其他,错误代码
- u8 IIC_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
- {
- IIC_Start();
- IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
- if(IIC_Wait_Ack())//等待应答
- {
- IIC_Stop();
- return 1;
- }
- IIC_Send_Byte(reg);//写寄存器地址
- IIC_Wait_Ack();//等待应答
- IIC_Start();
- IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
- IIC_Wait_Ack();//等待应答
- while(len)
- {
- if(len==1) *buf=IIC_Read_Byte(0);//读数据,发送nACK
- else *buf=IIC_Read_Byte(1);//读数据,发送ACK
- len--;
- buf++;
- }
- IIC_Stop();//产生一个停止条件
- return 0;
- }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108

3.2 MPU6050初始化
- //初始化MPU6050
- //返回值: 0,成功
- // 其他,错误代码
- u8 MPU_Init(void)
- {
- u8 res;
- IIC_Init();//初始化IIC总线
- IIC_Write_Byte(MPU_PWR_MGMT1_REG,0X80);//复位MPU6050
- delay_ms(100);
- IIC_Write_Byte(MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050
- MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
- MPU_Set_Accel_Fsr(0); //加速度传感器 ±2g
- MPU_Set_Rate(50); //设置采样率50HZ
- IIC_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
- IIC_Write_Byte(MPU_USER_CTRL_REG,0X00);//I2C主模式关闭
- IIC_Write_Byte(MPU_FIFO_EN_REG,0X00);//关闭FIFO
- IIC_Write_Byte(MPU_INTBP_CFG_REG,0X80);//INT引脚低电平有效
- res=IIC_Read_Byte(MPU_DEVICE_ID_REG);
- if(res==MPU_ADDR)//器件ID正确
- {
- IIC_Write_Byte(MPU_PWR_MGMT1_REG,0X01);//设置CLKSEL,PLL X 轴为参考
- IIC_Write_Byte(MPU_PWR_MGMT2_REG,0X00);//加速度陀螺仪都工作
- MPU_Set_Rate(50); //设置采样率为50HZ
- }else return 1;
- return 0;
- }
-
- //设置MPU6050陀螺仪传感器满量程范围
- //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
- //返回值:0,设置成功
- // 其他,设置失败
- u8 MPU_Set_Gyro_Fsr(u8 fsr)
- {
- return IIC_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
- }
-
- //设置MPU6050加速度传感器满量程范围
- //fsr:0,±2g;1,±4g;2,±8g;3,±16g
- //返回值:0,设置成功
- // 其他,设置失败
- u8 MPU_Set_Accel_Fsr(u8 fsr)
- {
- return IIC_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
- }
-
- //设置MPU6050的数字低通滤波器
- //lpf:数字低通滤波频率(Hz)
- //返回值:0,设置成功
- // 其他,设置失败
- u8 MPU_Set_LPF(u16 lpf)
- {
- u8 data=0;
- if(lpf>=188) data=1;
- else if(lpf>=98) data=2;
- else if(lpf>=42) data=2;
- else if(lpf>=42) data=3;
- else if(lpf>=20) data=4;
- else if(lpf>=10) data=5;
- else data=6;
- return IIC_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
- }
-
- //设置MPU6050的采样率(假定Fs=1KHz)
- //rate:4~1000(Hz)
- //返回值:0,设置成功
- // 其他,设置失败
- u8 MPU_Set_Rate(u16 rate)
- {
- u8 data;
- if(rate>1000)rate=1000;
- if(rate<4)rate=4;
- data=1000/rate-1;
- data=IIC_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
- return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
- }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
3.3 读取MPU6050相关测得原始数据
- //得到温度值
- //返回值:温度值(扩大了100倍)
- short MPU_Get_Temperature(void)
- {
- u8 buf[2];
- short raw;
- float temp;
- IIC_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf);
- raw=((u16)buf[0]<<8)|buf[1];
- temp=36.53+((double)raw)/340;
- return temp*100;;
- }
- //得到陀螺仪值(原始值)
- //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
- //返回值:0,成功
- // 其他,错误代码
- u8 MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
- {
- u8 buf[6],res;
- res=IIC_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
- if(res==0)
- {
- *gx=((u16)buf[0]<<8)|buf[1];
- *gy=((u16)buf[2]<<8)|buf[3];
- *gz=((u16)buf[4]<<8)|buf[5];
- }
- return res;
- }
-
- //得到加速度值(原始值)
- //ax,ay,az:陀螺仪x,y,z轴的原始读数(带符号)
- //返回值:0,成功
- // 其他,错误代码
- u8 MPU_Get_Accelerometer(short *ax,short *ay,short *az)
- {
- u8 buf[6],res;
- res=IIC_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
- if(res==0)
- {
- *ax=((u16)buf[0]<<8)|buf[1];
- *ay=((u16)buf[2]<<8)|buf[3];
- *az=((u16)buf[4]<<8)|buf[5];
- }
- return res;;
- }

