
热门标签
热门文章
- 1Compose 简单组件
- 2三种移动处理器(ARM, Intel和MIPS)之间的主要区别(转)_fcl all和arm
- 3已解决两种安装pip的方法亲测有效_pip 本地安装
- 4tauri vs electron_tauri和electron对比
- 5吴恩达2022机器学习专项课程(一) 第二周课程实验:特征缩放和学习率(多元)(Lab_03)
- 6机器学习——GBDT算法_机器学习gbdt模型
- 7使用FlexLua低代码技术开发的LoRa无线COD水质传感器
- 8Flask 应用:用户登录和注册
- 9R 编程语言 - 简介_r编程语言
- 10【Java基础】线程同步类 CountDownLatch_java countdownlatch
当前位置: article > 正文
自动驾驶之自行车模型_自动驾驶 自行车模型
作者:小蓝xlanll | 2024-04-22 08:05:07
赞
踩
自动驾驶 自行车模型
自行车模型建立在如下假设的基础之上:
1)车辆只有前、后两个车轮;
2)只考虑二维平面的运动,不考虑垂直方向的运功;
3)车辆低速运动,此时滑移角可以忽略不计。
自行车模型如下图所示,图中相关参数意义如下:
1)A为前轮、B为后轮、C为车辆的质心;
2)分别为后轮和前轮相对车身纵轴转角,由方向盘决定,通常情况下,由前轮转向,因而
。
3)质心C到前后轮的距离分别为和
,质心C的线速度为矢量
;
4)为
和车身纵轴的夹角,即为滑移角,低速时,该值很小,可以忽略不计;
5)代表车身纵轴和
轴的夹角,
轴正方向是设定的前进方向;
6)O为A、B、C的瞬时旋转中心。

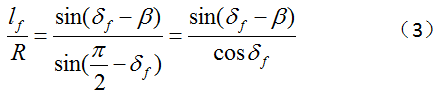
对于,由正弦定理,可得:

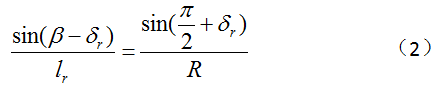
同样,对于,由正弦定理,可得:
由(1)式可得:
由(2)式可得:
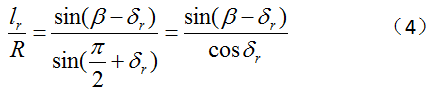
式(3)、(4)相加可得:

式(3)、(4)相除可得:

由式(6)可以得到:

式(5)和(7)是自行车模型中比较重要的两个公式,最终可以得到车辆的状态方程:

参考文献:
1)Rajamani R. Vehicle Dynamics and Control[M]. Springer Science, 2006.
2)车辆运动学模型—bicycle model,https://blog.csdn.net/weixin_40059786/article/details/104994715
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/467611
推荐阅读
相关标签

