
- 1这7本书都没有,还学什么Web安全?(附全套PDF)_web安全基础教程 pdf
- 2vivado时序违例相关_vivado 保持时间违例
- 3安全多方计算之BGW协议——基于非密码学的容错分布式计算_bgw protocol安全性证明
- 4Ubuntu 18.04/20.04 LTS 操作系统设置静态DNS_too many dns servers configured, the following ent
- 5网关 Spring Cloud Gateway 统一全局异常处理,那些年Java面试官常问的知识点_springcloudgateway全局异常处理
- 6【Windows日志】记录系统事件的日志_windows 有哪些日志
- 7安装nodejs时:The error code is 2503._nodejs 按照 the installer has encountere an unexpect
- 8数字IC手撕代码50题(1-10)_华为数字ic手撕代码
- 9安全计算环境(设备和技术注解)_当远程管理云计算平台中设备时,管理终端和云计算平台之间应建立双向身份验证机制
- 10人工智能极简史:一文读懂ChatGPT的前世今生_2019年伦敦举行的“图灵测试”中
想要快速进入车载测试?这份车载面试题集锦送给你,建议收藏!_车载测试 bcm 面试题
赞
踩
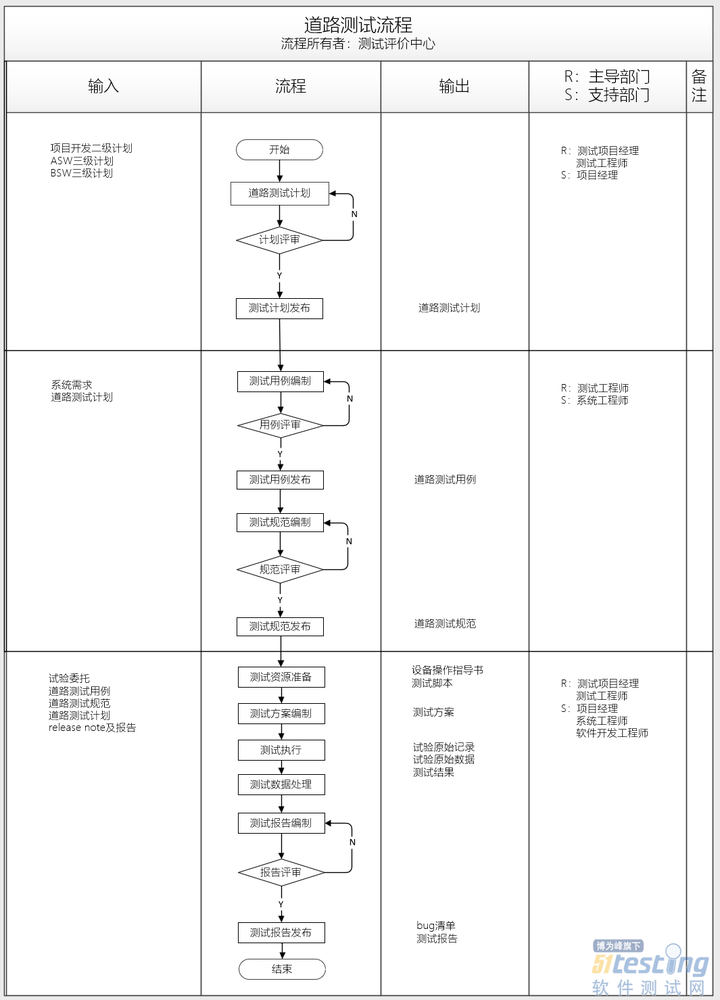
1.道路测试流程
测试场地
1.测试场地有哪些?
对于一些要求不太高/简单的测试场景可以找一些封闭的场地,如断头路或者是城市所在地当地政府提供的诸如智能网联专用道路之类的测试道路,对于复杂或相对要求高一些的测试场景可以到专业的国家智能网联汽车试点测试场进行测试,以下提供了国内常用的示范区:
①国家智能网联汽车(上海)试点示范区封闭测试区
②国家智能商用车检验检测(泰兴)基地
③中汽中心(盐城)汽车试验场
④国家智能交通综合测试基地(无锡)
⑤浙江5G车联网应用示范区(杭州云栖小镇&桐乡乌镇)
⑥中汽中心智能网联汽车测试(北京)基地
⑦中国汽研智能网联汽车(重庆)试验基地
⑧国家智能网联汽车(武汉)测试示范区
⑨国家智能网联汽车(长沙)测试区
⑩国家智能网联汽车封闭测试基地(海南)

2.试验场地有哪些道路类型?场地长度有多长?车道宽多少?收费标准?
常用的试验场类型有:直线性能路、动态广场
场地长度通常在2km—3km及以上
单条车道的标准宽度为3.75m
收费通常按小时收费,1h在¥2000+
CAN相关
1.CAN、CAN-FD、FleyRay、LIN总线通信距离速度区别?

2.CAN有哪些分类?
Drive CAN(动力CAN)
Body CAN(车身CAN)
Chassis CAN(底盘CAN)
Instrument CAN(仪表CAN)
Infotainment CAN(娱乐CAN)
Diagnostics CAN(诊断CAN)
3.CANoe都用到哪些分析窗口?
Analysis(Measurement Setup/Trace/Graphics/Statistics)
Simulation()
Diagnostics
Environment(System Variables)
Hardware
Tools(CAPL Browser/Panel Designer)
执行器性能测试
1.执行器测那些?
例:加速(油门);
减速(刹车);
转向(方向盘)
2.执行器性能测试工况有哪些?
斜坡输入,正弦输入,阶跃输入
状态机测试
1.CAN总线通过什么方式进行信号传输?
差分信号
2.CAN信号显性/隐形电平分别对应的逻辑信号值是多少?
显性电平对应逻辑“0”,隐形电平对应逻辑“1”
3.ACC各状态之间转换条件都有哪些?

数据采集
1.数采系统介绍?
数采系统主要是通过配备各种视觉传感器的测试车辆来采集自动驾驶相关数据(含原始数据),例如摄像头、雷达、激光雷达、GNSS等。这些数据可以用于在实验室中精确地模拟某些交通状况,测试ADAS感知算法和控制逻辑,从而可以节省大量的道路测试和验证时间。
2.数据采集的工作内容有哪些?
数采分为行车和泊车的数据采集
日常工作内容:数采设备调试
数采软件的学习使用
采集的数据的后处理
3.数据后处理是如何处理的?
先将实车上(WinDows系统)采集的数据在Linux系统中通过软件转成rosbag包,再通过脚本将ros包生成result结果,结果中包含目标物、车道线等信息(文件格式有:csv、txt等)
在通过回注的方式导入到软件中即可看到可视化的目标物、车道线等信息。
4.数采设备时间同步的精度能达到多少?
例:500微秒到1毫秒的同步精度,处于行业领先地位。
5.数采常用Linux命令?
例:①sudo su//取得管理员权限
②df-h//检查硬盘是否挂载成功
③rm-rf//删除指定文件夹下文件
④poweroff/shutdown/halt//关机命令
⑤ssh[用户名]@IP地址//切换到另一台主机
⑥sudo./start.sh[路径]//以管理员权限运行sh脚本,将结果存放到指定路径线
6.采集的数据主要是什么类型?数据后处理的ros包包含哪些格式数据?最终处理完成的数据格式有哪些?
采集的数据主要是一些工程文件
ros包主要包含bag及xml文件
最终处理后的数据主要是csv及txt,如真值数据(.csv)、车道线数据(lane.csv)
7.ECU和相机之间通过什么技术来传输视频流?
通常使用串行解串技术
8.数采数据量?
软件算法到硬件设备,自动驾驶领域天生就会产生很多数据。一辆符合或者具备自动驾驶的车有摄像头、雷达、定位系统等各种各样的感知设备,这些感知设备运行24小时,大概会采集4个TB的数据。
9.数据落盘(数据带宽估算)?
例:①8MP前视摄像头数据量(RAW14):
3840*2160*14bit*30Hz=3484Mbps
②3MP环视摄像头数据量(RAW12):
1920*1536*12bit*30Hz=1062Mbps
③1路前视+4路环视摄像头总数据量:
3484+1062*4=7732Mbps=7.55Gbps=0.94GB/s=3398GB/h=3.32TB/h
④1路前置雷达数据量:
3.3GB/h
⑤4路角雷达数据量:
700MB/h*4=2800MB/h=2.8GB/h
10.数采时间同步原理?
由于每个传感器都有自己的时间戳,为了保证各传感器的时间同步,需要对传感器和采集系统授时。整个系统由组合惯导获取GPS时间,并对时间同步服务器授时;然后由时间同步服务器通过PTP网关给激光雷达和采集主机授时,使整个系统使用同一个时间源(GPS时间);同时时间同步服务器输出trigger信号去触发摄像头,控制摄像头的曝光时刻,从而实现所有传感器的数据同步。
11.说说什么是数据回灌?
回注设备在智驾仿真中非常重要,因为某些难以复现的场景,实车测试时发送过一次后很难再去复现第二次,比如说动物在马路乱窜、交通事故的还原、卡车后的红绿灯、加塞的车辆、黑暗行驶场景、雪地阳光产生的逆光等。智驾回注设备可以让这些边角案例的素材形成一个数据原型注入进域控制器中,然后域控制器可以利用这些数据做一个开环的感知结果的输出。
12.数据故障模拟有哪些?
除了真实场景的回注,还可以进行故障模拟,涉及到视频帧的故障模拟,比如在测试的过程中随机的位置或者固定的位置设置一些马赛克,或者加入一些异常的图像,破坏原生视频的真实性,进行验证。同时,可以模拟底层故障,如模拟丢帧、模拟时延等。
13.什么是数据标注?
人工标注费时费力,可以采用半监督学习(伪标签学习/自动标签学习)
原理:首先在人工标注真值的数据上训练模型,然后使用经过训练的模型来预测无标签数据的标签,从而创建伪标签。
此外,将标签数据和新生成的伪标签数据结合起来作为新的训练数据。大量使用自动标签或伪标签就是半监督学习。
测试进阶
在智能驾驶发展得如火如荼的今天,软件测试行业也随之衍生出车载测试的岗位需求。对比其它在招岗位,车载测试的薪资也更加可观。
最后:
可以到我的个人号:atstudy-js,可以免费领取一份10G软件测试工程师面试宝典文档资料。以及相对应的视频学习教程免费分享!其中包括了有基础知识、Linux必备、Mysql数据库、抓包工具、接口测试工具、测试进阶-Python编程、Web自动化测试、APP自动化测试、接口自动化测试、测试持续集成、测试架构开发测试框架、性能测试等。
这些测试资料,对于做【软件测试】的朋友来说应该是最全面最完整的备战仓库,这个仓库也陪伴我走过了最艰难的路程,希望也能帮助到你!

