
热门标签
热门文章
- 1Linux系统编程03_linuxoffset
- 2python基于Django框架的物资配送仓储管理系统flask_django开发物料管理系统
- 3安全多方计算之二:一文搞懂百万富翁问题
- 4毕业设计:基于深度学习的自动驾驶目标检测算法系统_基于深度学习的自动驾驶障碍物识别研究的目的和意义
- 5多线程测试+互斥锁(1)【C++】
- 6Redis更新缓存的正确姿势(先更新DB,再删除缓存)_redis先操作数据库,再删除缓存
- 7element ui Tree树形控件
- 8字节是真的难进,测开4面终上岸,压抑5个月,终于可以放声呐喊_字节测开四面
- 9transformers加载模型报错_transformers加载本地模型失败
- 10Facebook广告投放数据分析_fb roas 获量
当前位置: article > 正文
ubuntu 18.04 使用 LIO-Livox算法和livox horizon建模
作者:小蓝xlanll | 2024-05-20 12:40:55
赞
踩
livox horizon
一.安装步骤
1.1
安装步骤,算法原理都来自于官方,在这里不多做介绍。GitHub - Livox-SDK/LIO-Livox: A Robust LiDAR-Inertial Odometry for Livox LiDAR
1.2遇到的一些问题:
1.在安装前置的pcl库时,按照网上的方法源码安装非常的麻烦,我建议直接用指令安装。
sudo apt-get install libpcl-dev或者
sudo apt install libpcl-dev再进行软连接
sudo ln -s /usr/lib/libvtkproj4.so.5.10 /usr/lib/libvtkproj4.so2.要将livox_ros_driver编译安装在lio-livox的src文件夹中,不然最后编译安装的时候会出错
3.在最后一步catkin_make时,碰见这样的错误

解决方法:参看这位ego-planner编译问题_我家三少的博客-CSDN博客
总得来说按照官方教程来安装基本上没有问题 ,很简单
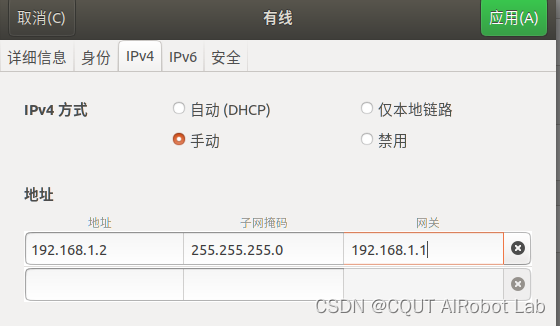
二.连接设备
如果是直接将电脑上的网线借口和设备直连,则需要将设备的ip地址改为静态ip地址。在ubuntu的官方设置中,将连接设备的那个连接设置ip地址改为。如果连不上,建议用livox_viewer试一试。
三.运行
先开一个终端:
- cd ~/catkin_ws
- source devel/setup.bash
- roslaunch livox_ros_driver livox_lidar_msg.launch
如果连接上了,会显示:
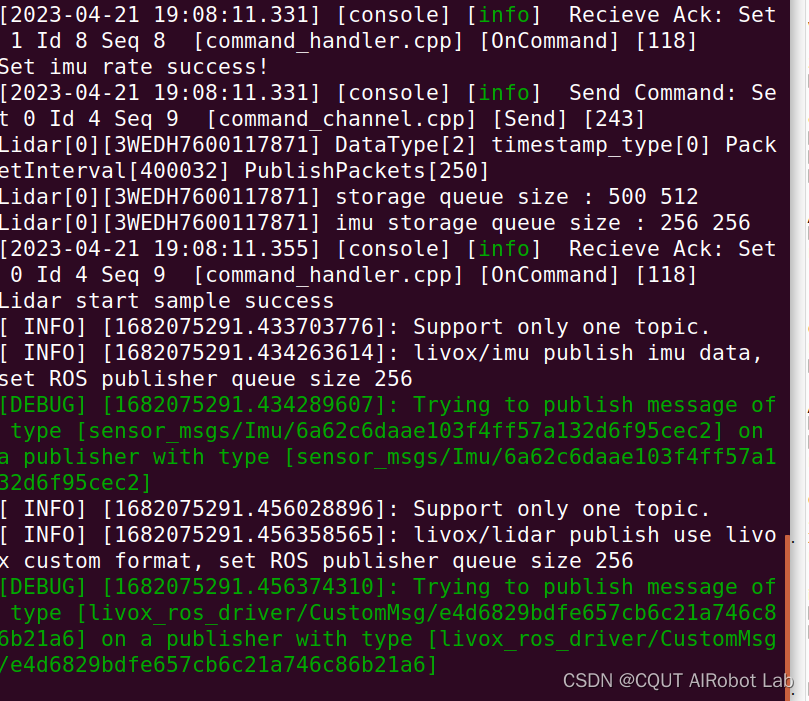
再开一个
- cd ~/catkin_ws
- source devel/setup.bash
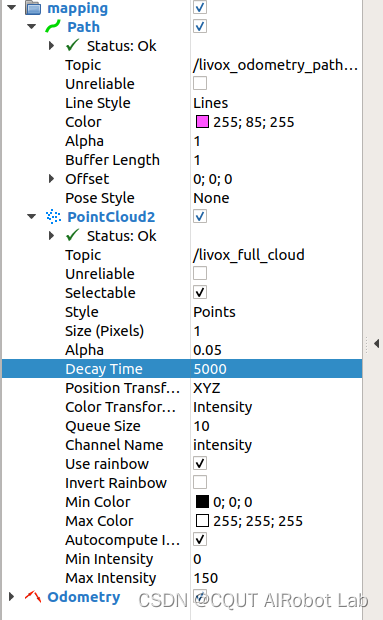
- roslaunch lio_livox horizon.launch
这时候就会开始录制点云文件以及建模。我使用的是livox-horizon。但此时可能发现的一个问题是点云数据只会保存一会,等摄像头经过就没有了。这时候需要更改点云保存的时间.
显示结果: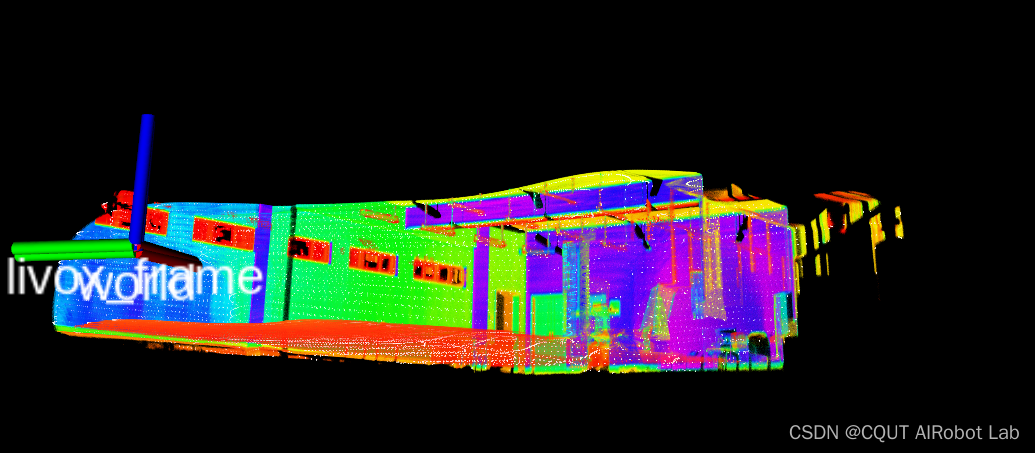
需要注意的是,不要将摄像头太靠近墙壁或者转向的时候太迅速,会导致坐标乱飞。
四.保存建模地图
不知道是不是使用方法错误,此算法不能自动保存地图。我使用了一种比较麻烦的办法。
4.1
首先下载一个cloudcompare软件,可以直接使用代码安装。
4.2
在建模开始后,随便在哪里(最好就是当前文件夹)创建一个文件夹,运行
rosrun pcl_ros pointcloud_to_pcd input:=/livox_full_cloud_mapped这样会录制每一帧的点云地图。
4.3
打开cloudcompare,在左上角
选中所有录制的文件,这样就会显示你的地图,如果想将这些pcd文件合成一个pcd可以尝试使用edit中的选项。
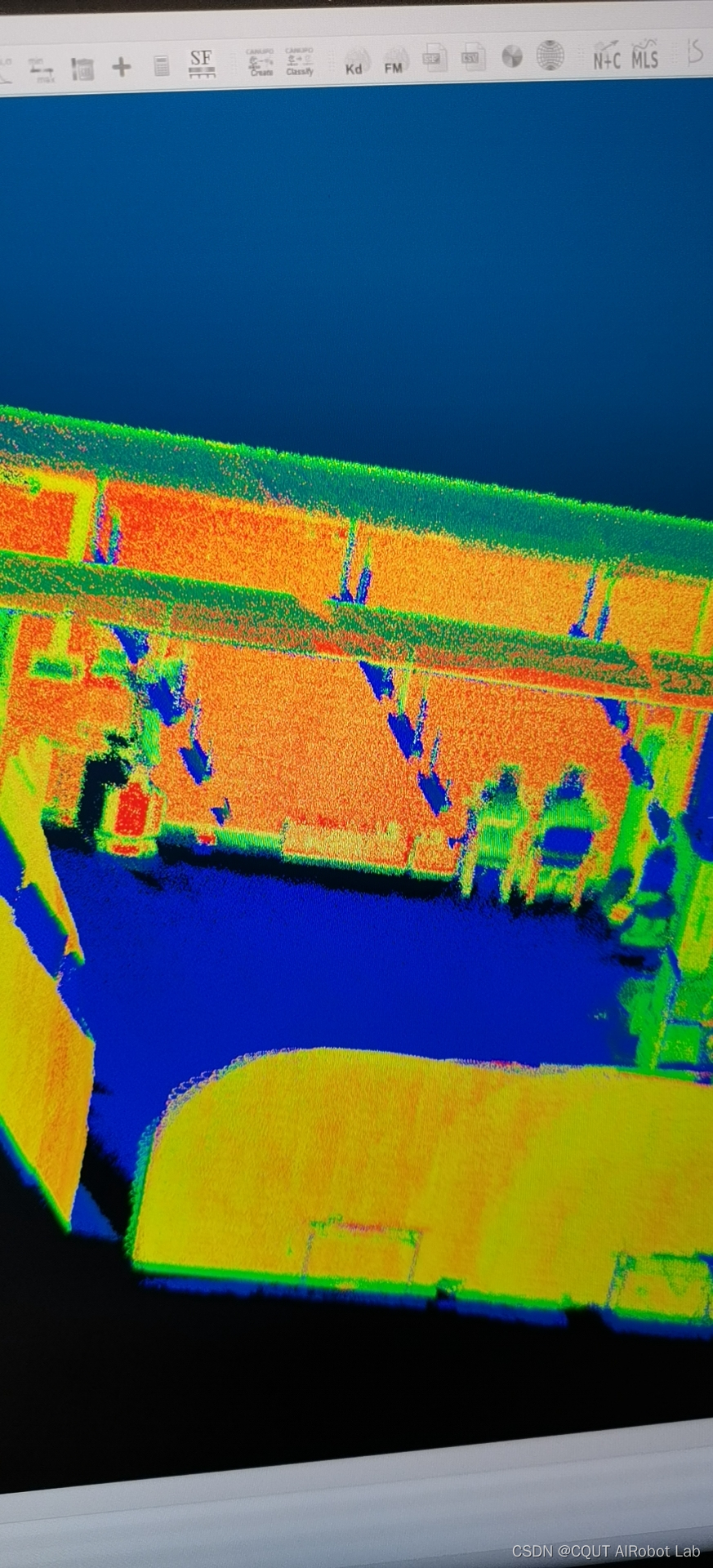
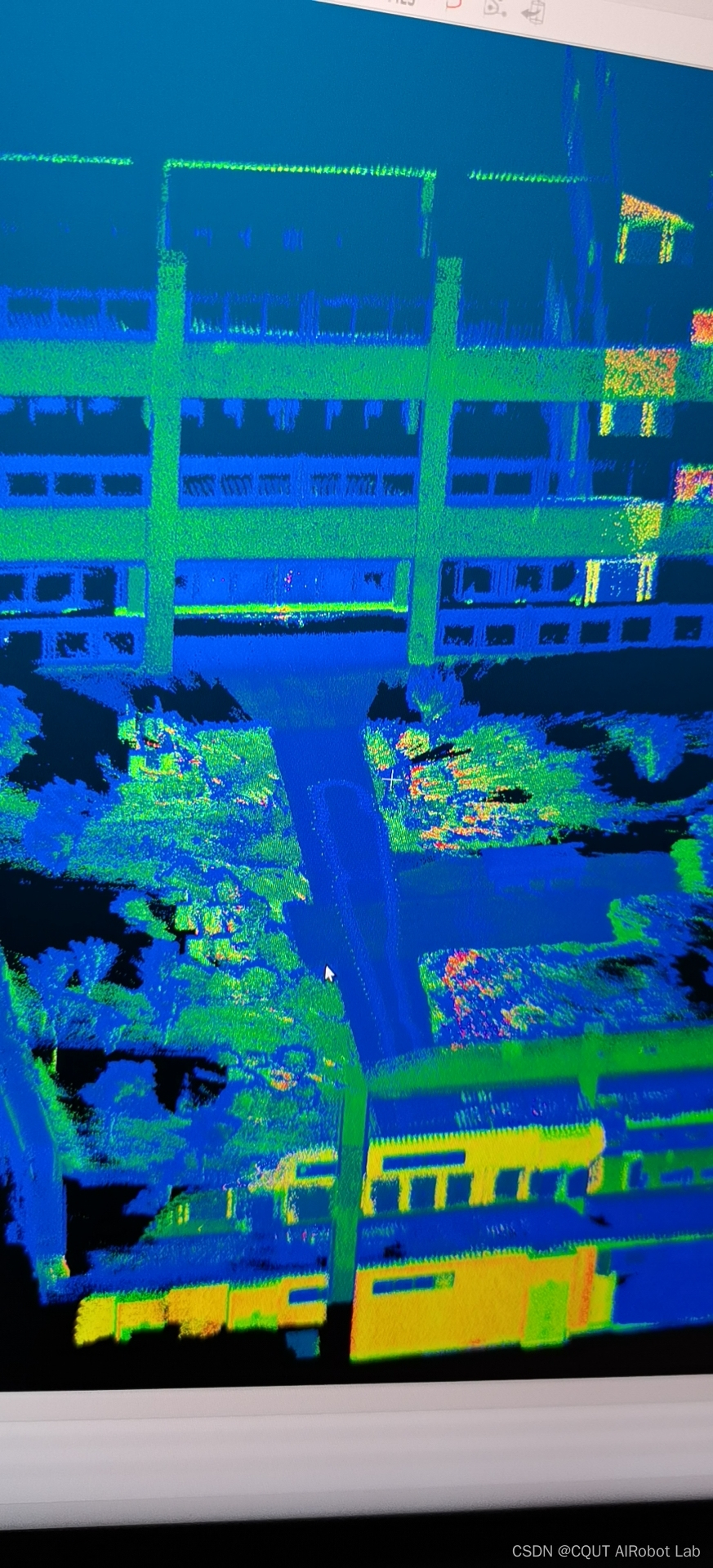
最后贴几张我自己的建模结果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/597699
推荐阅读
相关标签

