
热门标签
热门文章
- 1数据仓库技术及应用(Hive索引)
- 2渲染控制之条件渲染、循环渲染以及数据懒加载_lazyforeach加载网络数据
- 3Moveit +Gazebo:搭建单臂机械臂仿真平台_moveit gazebo
- 4Elasticsearch 认证模拟题 - 8
- 5强力推荐一个超级好用的大模型测评工具_大模型评测工具特征测试
- 6Android学习记录(二)_android studio r.id
- 7使用smtplib发送邮件_smtplib.smtpdataerror: (550, b'the "from" header i
- 8直播预告|手把手教你玩转 Milvus Lite !
- 9【2024Java最新学习路线】写了很久,这是一份最适合普通大众、科班、非科班的路线_java 学习路线 新技术
- 10深信服安全软件产品配置概况_深信服 安装了几个软件
当前位置: article > 正文
蓝桥杯嵌入式第十五届省赛编程题真题+代码_第15届蓝桥杯嵌入式省赛真题
作者:小蓝xlanll | 2024-06-12 02:21:36
赞
踩
第15届蓝桥杯嵌入式省赛真题


- STM32CubeMX
-
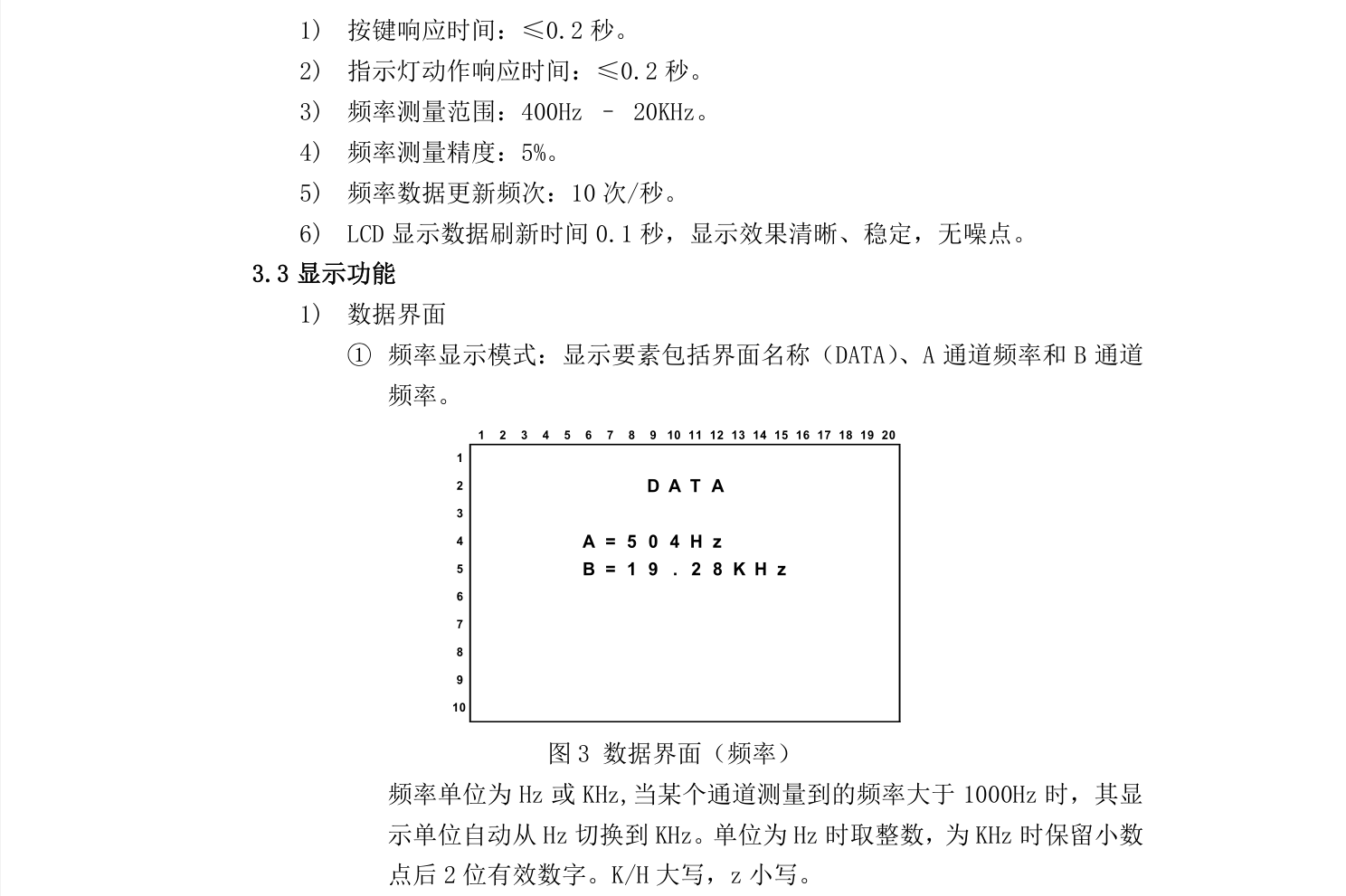
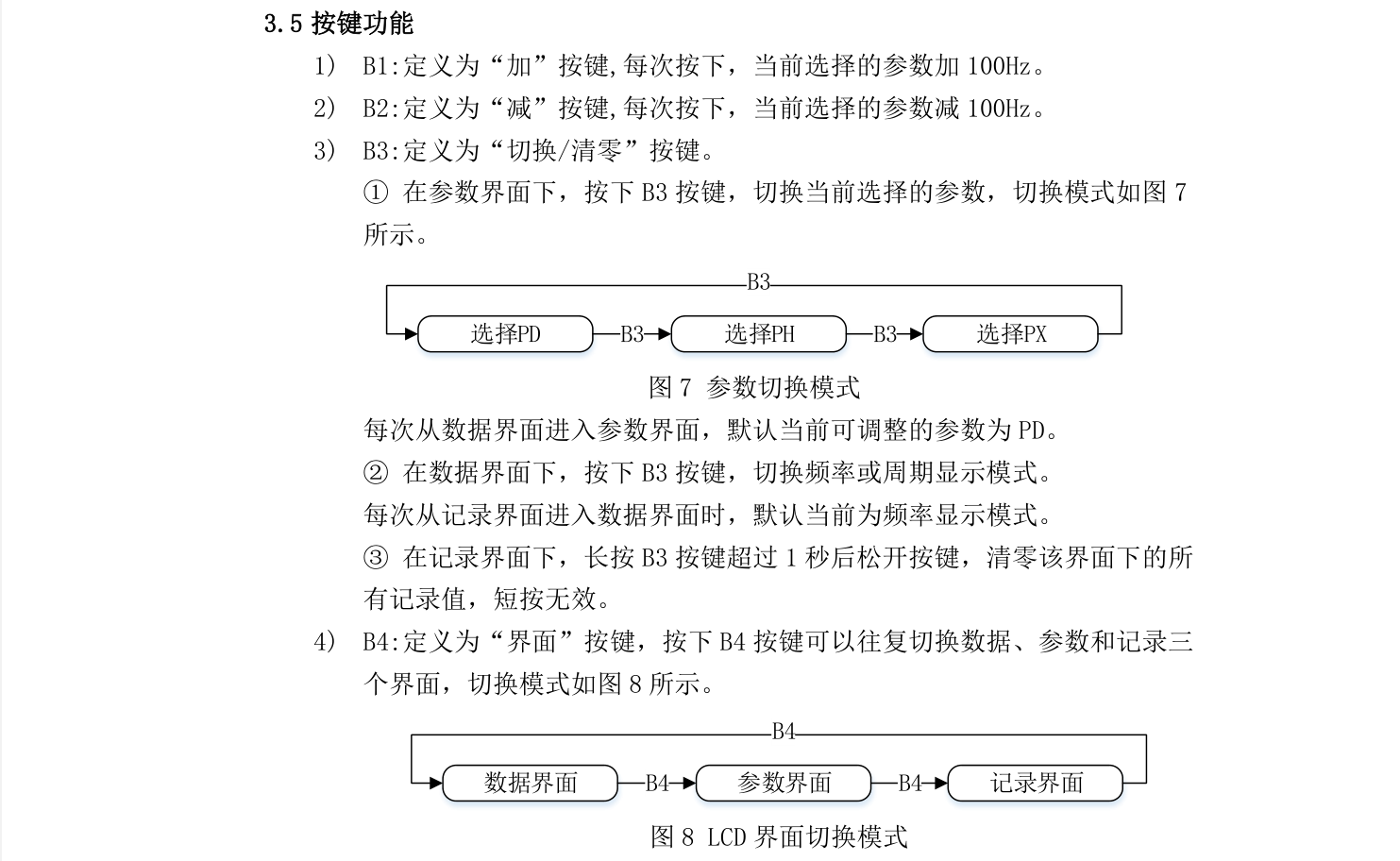
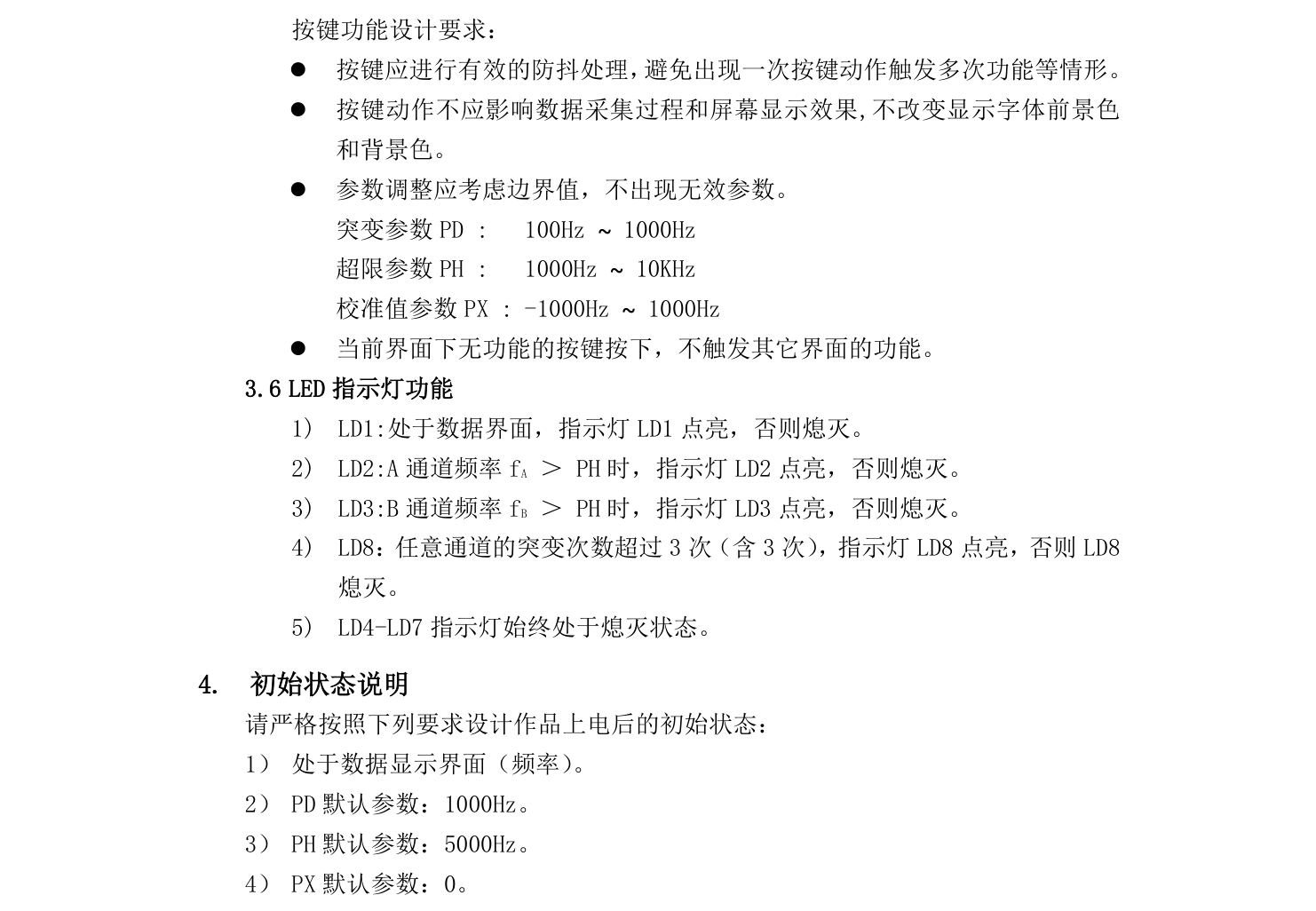
引脚功能一览:包括LED1、LED2、LED3、LED8;按键B1、B2、B3、B4;

-
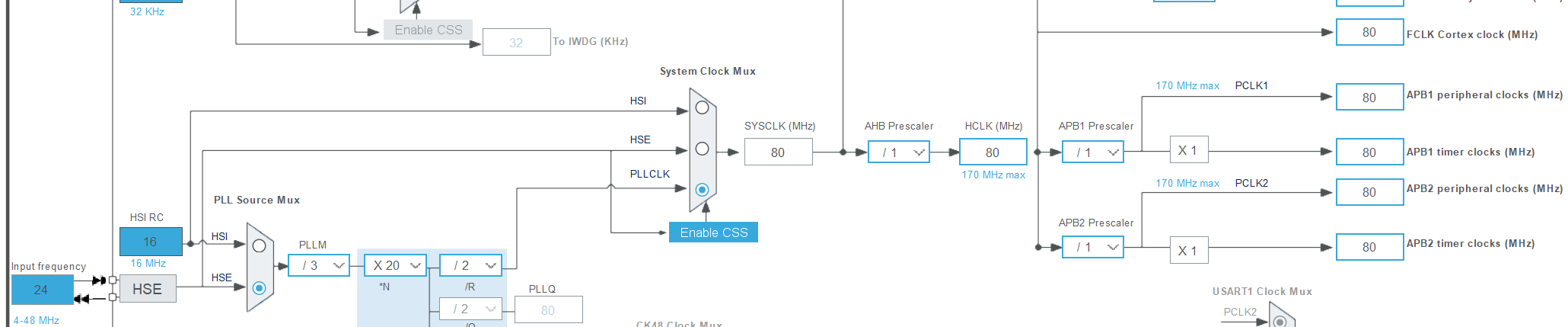
时钟树配置:80MHz系统主频
-
TIM2配置:PA15捕获A通道XL555频率(频率大小受R40电位器调控)、TIM3配置:PB4捕获B通道XL555频率(频率大小受R39电位器调控)


- 工程代码
- 主程序
/**********************************main.h*************************************/ //枚举变量、结构体变量定义 enum { DATAf = 1, DATAt, PARA, RECD, } ; typedef struct { char MyStr[21]; uint8_t ucBrush; uint8_t Interface; } LCD; extern LCD Lcd; typedef struct { double dFreq; double dTime; double Max; double Min; uint8_t ucBrush; uint8_t ND; uint8_t NH; } TIM; extern TIM myR40A; extern TIM myR39B; /**********************************main.c*************************************/ #include "main.h" #include "tim.h" #include "gpio.h" #include <stdio.h> #include "key.h" #include "lcd.h" #include "led.h" LCD Lcd; //LCD相关结构体变量 TIM myR40A; //TIM2相关结构体变量 TIM myR39B; //TIM3相关结构体变量 uint16_t PD = 1000; //PD参数,默认值1000 uint16_t PH = 5000; //PH参数,默认值5000 int PX = 0; //PX参数,默认值0 uint8_t ParaChoice = 1; //参数选择标志 uint16_t t3s = 0; //3s窗口时间 void SystemClock_Config(void); void LCD_Proc(void); void R40A_Capture(void); void R39B_Capture(void); void Measured_Proc(void); void InitMySystem(void) { LCD_Init(); //LCD初始化 LCD_Clear(Black); LCD_SetBackColor(Black); LCD_SetTextColor(White); Lcd.Interface = DATAf; //默认界面 HAL_TIM_IC_Start(&htim2,TIM_CHANNEL_1); //开启TIM2输入捕获 HAL_TIM_IC_Start(&htim3,TIM_CHANNEL_1); //开启TIM3输入捕获 HAL_Delay(10); //上电延时10ms } int main(void) { HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_TIM2_Init(); MX_TIM3_Init(); InitMySystem(); /*数据预处理BEGIN*/ R40A_Capture(); R39B_Capture(); myR40A.dFreq += PX; myR39B.dFreq += PX; if(myR40A.dFreq > 20000) //限幅,频率测量最大值20KHz myR40A.dFreq = 20000; if(myR39B.dFreq > 20000) myR39B.dFreq = 20000; myR40A.Max = myR40A.Min = myR40A.dFreq; myR39B.Max = myR39B.Min = myR39B.dFreq; /*数据预处理END*/ while (1) { Key_Proc(); //按键 LED_Proc(); //LED LCD_Proc(); //LCD Measured_Proc(); //数据 } } void R40A_Capture(void) { myR40A.dTime = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1); //周期 myR40A.dFreq = 1000000 / myR40A.dTime; //1M(us)/T(us) 频率 } void R39B_Capture(void) { myR39B.dTime = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1); myR39B.dFreq = 1000000 / myR39B.dTime; } void Measured_Proc(void) { static uint8_t nhflagA = 0; static uint8_t nhflagB = 0; /*Version2 轮询执行 BEGIN*/ if(t3s >= 3000) //3s窗口期 { t3s = 0; if(myR40A.Max - myR40A.Min > PD) //判断结果 myR40A.ND ++; if(myR39B.Max - myR39B.Min > PD) myR39B.ND ++; myR40A.Max = myR40A.Min = myR40A.dFreq;//判断完自动更新最大最小值 myR39B.Max = myR39B.Min = myR39B.dFreq; } else { if(myR40A.dFreq >= myR40A.Max) { myR40A.Max = myR40A.dFreq; } else if(myR40A.dFreq <= myR40A.Min) { myR40A.Min = myR40A.dFreq; } if(myR39B.dFreq >= myR39B.Max) { myR39B.Max = myR39B.dFreq; } else if(myR39B.dFreq <= myR39B.Min) { myR39B.Min = myR39B.dFreq; } } /*Version2 轮询执行 End*/ if(myR40A.ucBrush < 100) //100ms刷新数据 return ; myR40A.ucBrush = 0; R40A_Capture(); R39B_Capture(); myR40A.dFreq += PX; myR39B.dFreq += PX; if(myR40A.dFreq > 20000) myR40A.dFreq = 20000; if(myR39B.dFreq > 20000) myR39B.dFreq = 20000; if(myR40A.dFreq <= PH) nhflagA = 1; else { if(nhflagA == 1) { myR40A.NH ++; nhflagA = 0; } } if(myR39B.dFreq <= PH) nhflagB = 1; else { if(nhflagB == 1) { myR39B.NH ++; nhflagB = 0; } } } /*4个界面*/ void LCD_InterfaceDATAf(void) //1 { LCD_DisplayStringLine(Line1,(u8*)" DATA "); if(myR40A.dFreq < 0) sprintf(Lcd.MyStr," A=NULL "); else if(myR40A.dFreq <= 1000) sprintf(Lcd.MyStr," A=%.fHz ",myR40A.dFreq); else sprintf(Lcd.MyStr," A=%.2fKHz ",myR40A.dFreq/1000); LCD_DisplayStringLine(Line3,(u8*)Lcd.MyStr); if(myR39B.dFreq < 0) sprintf(Lcd.MyStr," B=NULL "); else if(myR39B.dFreq <= 1000) sprintf(Lcd.MyStr," B=%.fHz ",myR39B.dFreq); else sprintf(Lcd.MyStr," B=%.2fKHz ",myR39B.dFreq/1000); LCD_DisplayStringLine(Line4,(u8*)Lcd.MyStr); } void LCD_InterfaceDATAt(void) //2 { LCD_DisplayStringLine(Line1,(u8*)" DATA "); if(myR40A.dTime <= 1000) sprintf(Lcd.MyStr," A=%.fuS ",myR40A.dTime); else sprintf(Lcd.MyStr," A=%.2fmS ",myR40A.dTime/1000); LCD_DisplayStringLine(Line3,(u8*)Lcd.MyStr); if(myR39B.dTime <= 1000) sprintf(Lcd.MyStr," B=%.fuS ",myR39B.dTime); else sprintf(Lcd.MyStr," B=%.2fmS ",myR39B.dTime/1000); LCD_DisplayStringLine(Line4,(u8*)Lcd.MyStr); } void LCD_InterfacePARA(void) //3 { LCD_DisplayStringLine(Line1,(u8*)" PARA "); sprintf(Lcd.MyStr," PD=%dHz ",PD); LCD_DisplayStringLine(Line3,(u8*)Lcd.MyStr); sprintf(Lcd.MyStr," PH=%dHz ",PH); LCD_DisplayStringLine(Line4,(u8*)Lcd.MyStr); sprintf(Lcd.MyStr," PX=%dHz ",PX); LCD_DisplayStringLine(Line5,(u8*)Lcd.MyStr); } void LCD_InterfaceRECD(void) //4 { LCD_DisplayStringLine(Line1,(u8*)" RECD "); sprintf(Lcd.MyStr," NDA=%d ",myR40A.ND); LCD_DisplayStringLine(Line3,(u8*)Lcd.MyStr); sprintf(Lcd.MyStr," NDB=%d ",myR39B.ND); LCD_DisplayStringLine(Line4,(u8*)Lcd.MyStr); sprintf(Lcd.MyStr," NHA=%d ",myR40A.NH); LCD_DisplayStringLine(Line5,(u8*)Lcd.MyStr); sprintf(Lcd.MyStr," NHB=%d ",myR39B.NH); LCD_DisplayStringLine(Line6,(u8*)Lcd.MyStr); } void LCD_Proc(void) { if(Lcd.ucBrush < 100) return ; Lcd.ucBrush = 0; switch(Lcd.Interface) { case DATAf: LCD_InterfaceDATAf(); break; case DATAt: LCD_InterfaceDATAt(); break; case PARA: LCD_InterfacePARA(); break; case RECD: LCD_InterfaceRECD(); break; } } void HAL_IncTick(void) { uwTick += uwTickFreq; Lcd.ucBrush ++; Key.ucBrush ++; myR40A.ucBrush ++; t3s ++; /*Version1 中断执行 BEGIN*/ if(t3s == 3000) { t3s = 0; //3s窗口期 if(myR40A.Max - myR40A.Min > PD) //判断结果 myR40A.ND ++; if(myR39B.Max - myR39B.Min > PD) myR39B.ND ++; myR40A.Max = myR40A.Min = myR40A.dFreq;//判断完自动更新最大最小值 myR39B.Max = myR39B.Min = myR39B.dFreq; } else { if(myR40A.dFreq >= myR40A.Max) { myR40A.Max = myR40A.dFreq; } else if(myR40A.dFreq <= myR40A.Min) { myR40A.Min = myR40A.dFreq; } if(myR39B.dFreq >= myR39B.Max) { myR39B.Max = myR39B.dFreq; } else if(myR39B.dFreq <= myR39B.Min) { myR39B.Min = myR39B.dFreq; } } /*Version1 中断执行 BEGIN*/ /*Version2 轮询执行 -- Measured_Proc*/ }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 按键模块
/**********************************key.h*************************************/ #ifndef _KEY_H_ #define _KEY_H_ #include "main.h" enum { KEY1 = 1, KEY2, KEY3, KEY4, }; typedef struct { uint8_t ucBrush; } KEY; extern KEY Key; void Key_Proc(void); #endif /**********************************key.c*************************************/ #include "key.h" #include "led.h" #include "lcd.h" KEY Key; extern uint8_t ParaChoice; extern uint16_t PD; extern uint16_t PH; extern int PX; uint8_t Key_Read(void) //键值获取 { if(!(GPIOB->IDR & GPIO_PIN_0)) return 1; if(!(GPIOB->IDR & GPIO_PIN_1)) return 2; if(!(GPIOB->IDR & GPIO_PIN_2)) return 3; if(!(GPIOA->IDR & GPIO_PIN_0)) return 4; return 0; } void Key1_Function(void) //+ { if(Lcd.Interface != PARA) return ; if(ParaChoice == 1) { if(PD < 1000) PD += 100; } else if(ParaChoice == 2) { if(PH < 10000) PH += 100; } else if(ParaChoice == 3) { if(PX < 1000) PX += 100; } } void Key2_Function(void) //- { if(Lcd.Interface != PARA) return ; if(ParaChoice == 1) { if(PD > 100) PD -= 100; else PD = 100; } else if(ParaChoice == 2) { if(PH > 1000) PH -= 100; else PH = 1000; } else if(ParaChoice == 3) { if(PX > -1000) PX -= 100; else PX = -1000; } } void Key3_Function(void) { if(Lcd.Interface == PARA) { ParaChoice = ParaChoice % 3 + 1; } if(Lcd.Interface == DATAf) { LCD_Clear(Black); Lcd.Interface = DATAt; } else if(Lcd.Interface == DATAt) { LCD_Clear(Black); Lcd.Interface = DATAf; } } void Key3_LongClick(void) //长按功能 { //20ms once static uint16_t key_cnt = 0; static uint8_t longflag = 0; if(Lcd.Interface != RECD) return ; if((GPIOB->IDR & GPIO_PIN_2) == 0) { key_cnt ++; if(key_cnt >= 50) //20ms * 50 { if(longflag == 0) { longflag = 1; } } } else { if(longflag == 1) { /*long click*/ myR40A.ND = 0; //清零参数 myR39B.ND = 0; myR40A.NH = 0; myR39B.NH = 0; } key_cnt = 0; longflag = 0; } } void Key4_Function(void) //界面切换 { LCD_Clear(Black); ParaChoice = 1; if(Lcd.Interface == DATAf) Lcd.Interface = PARA; else Lcd.Interface = Lcd.Interface % 4 + 1; } void Key_Proc(void) { uint8_t new_key; static uint8_t old_key; if(Key.ucBrush < 20) //20ms return; Key.ucBrush = 0; new_key = Key_Read(); if(new_key == old_key) new_key = 0; else old_key = new_key; switch(new_key) { case KEY1: Key1_Function(); break; case KEY2: Key2_Function(); break; case KEY3: Key3_Function(); break; case KEY4: Key4_Function(); break; } Key3_LongClick(); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- LED灯模块
/**********************************led.h*************************************/ #ifndef _LED_H_ #define _LED_H_ #include "main.h" #define LED1 0x01 #define LED2 0x02 #define LED3 0x04 #define LED8 0x80 typedef struct { uint8_t State; } LED; extern LED Led; void LED_Proc(void); #endif /**********************************led.c*************************************/ #include "led.h" LED Led; extern uint16_t PH; void LED_Disp(uint8_t state) { GPIOC->ODR = ~ state << 8; GPIOD->BSRR = GPIO_PIN_2; GPIOD->BRR = GPIO_PIN_2; } void LED_Proc(void) { if(Lcd.Interface == DATAf || Lcd.Interface == DATAt) Led.State |= LED1; else Led.State &= ~LED1; if(myR40A.dFreq > PH) Led.State |= LED2; else Led.State &= ~LED2; if(myR39B.dFreq > PH) Led.State |= LED3; else Led.State &= ~LED3; if(myR39B.ND >= 3 || myR40A.ND >= 3) Led.State |= LED8; else Led.State &= ~LED8; LED_Disp(Led.State); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/705715
推荐阅读
相关标签

