
- 1Paragon NTFS for Mac 破解版 15.5 Mac读写NTFS硬盘必备软件(附激活序列号)_mac ntfs 读写推荐
- 2据说逼近GPT-4?国内大模型 ChatGLM4 尝鲜体验
- 3C语言学习随笔——XYOJ练习题
- 4长连接技术
- 5基于Langchain-Chatchat + chatGLM3 轻松在本地部署一个知识库_mac 部署langchain和chatglm,读取数据库信息
- 6【数据结构学习记录22】——有向无环图及其应用
- 7逆天了!ChatGPT回答癌症问题,准确性与美国国家癌症研究所标准答案不相上下...
- 8AndroidStudio报错:Caused by: org.greenrobot.eventbus.EventBusException:Subscriber class...
- 9try-catch捕获异常_try catch可以捕获error吗
- 10AndroidSchedulers.mainThread()无法切换到主线程,原来是细节问题啊_subscribeon(androidschedulers.mainthread())
Paxos、Raft、ZAB算法
赞
踩
Paxos算法
Paxos算法是Leslie Lamport在1990年提出的一种基于消息传递的一致性算法。基于Paxos协议的数据同步与传统主备方式最大的区别在于:Paxos只需超过半数的副本在线且相互通信正常,就可以保证服务的持续可用,且数据不丢失。
Paxos将系统中的角色分为提议者 (Proposer),决策者 (Acceptor),和最终决策学习者 (Learner):
- Proposer: 提出提案 (Proposal)。Proposal信息包括提案编号 (Proposal ID) 和提议的值 (Value)。
- Acceptor:参与决策,回应Proposers的提案。收到Proposal后可以接受提案,若Proposal获得多数Acceptors的接受,则称该Proposal被批准。
- Learner:不参与决策,从Proposers/Acceptors学习最新达成一致的提案(Value)。
在多副本状态机中,每个副本同时具有Proposer、Acceptor、Learner三种角色。

Paxos算法通过一个决议分为两个阶段(Learn阶段之前决议已经形成):
- 第一阶段:Prepare阶段。Proposer向Acceptors发出Prepare请求,Acceptors针对收到的Prepare请求进行Promise承诺。
- 第二阶段:Accept阶段。Proposer收到多数Acceptors承诺的Promise后,向Acceptors发出Propose请求,Acceptors针对收到的Propose请求进行Accept处理。
- 第三阶段:Learn阶段。Proposer在收到多数Acceptors的Accept之后,标志着本次Accept成功,决议形成,将形成的决议发送给所有Learners。
Basic-Paxos
Basic-Paxos解决的问题:在一个分布式系统中,如何就一个提案达成一致。
Mulit-Paxos
Mulit-Paxos解决的问题:在一个分布式系统中,如何就一批提案达成一致。
Raft算法
Raft角色
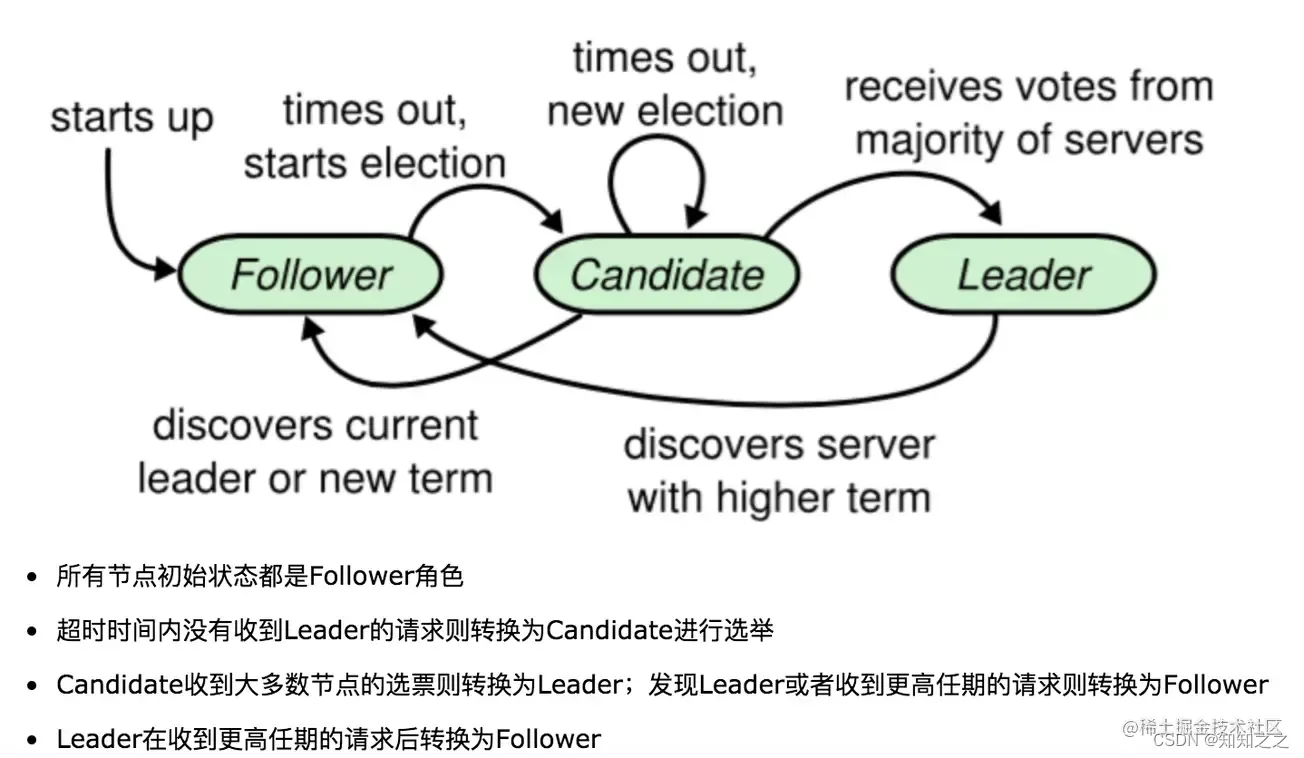
Raft算法是Paxos算法的一种简化实现。包括三种角色:leader,candidate和follower。
- follow:所有节点都以follower的状态开始,如果没有收到leader消息则会变成candidate状态。
- candidate:会向其他节点拉选票,如果得到大部分的票则成为leader,这个过程是Leader选举。
- leader:所有对系统的修改都会先经过leader。
Raft算法过程
Raft有两个基本过程:
- Leader选举: 每个candidate随机经过一定时间都会提出选举方案,最近阶段中的票最多者被选为leader。
- 同步log: leader会找到系统中log(各种事件的发生记录)最新的记录,并强制所有的follow来刷新到这个记录。
Raft和Multi-Paxos的区别
Raft是基于对Multi-Paxos的两个限制形成的:
发送的请求的是连续的, 也就是说Raft的append 操作必须是连续的, 而Paxos可以并发 (这里并发只是append log的并发, 应用到状态机还是有序的)。
Raft选主有限制,必须包含最新、最全日志的节点才能被选为leader. 而Multi-Paxos没有这个限制,日志不完备的节点也能成为leader。
Raft可以看成是简化版的Multi-Paxos。
Multi-Paxos允许并发的写log,当leader节点故障后,剩余节点有可能都有日志空洞。所以选出新leader后, 需要将新leader里没有的log补全,在依次应用到状态机里。
ZAB算法
在做分布式系统时,我们常常需要维护管理集群的配置信息、服务的注册发现、共享锁等功能,而ZooKeeper正是解决这些问题的一把好手。ZAB(ZooKeeper Atomic Broadcast)则是为ZooKeeper设计的一种支持崩溃恢复的原子广播协议。
很多人会误以为ZAB协议是Paxos的一种特殊实现,事实上他们是两种不同的协议。ZAB和Paxos最大的不同是,ZAB主要是为分布式主备系统设计的,而Paxos的实现是一致性状态机(state machine replication)
尽管ZAB不是Paxos的实现,但是ZAB也参考了一些Paxos的一些设计思想,比如:
-
leader向follows提出提案(proposal)
-
leader 需要在达到法定数量(半数以上)的follows确认之后才会进行commit
-
每一个proposal都有一个纪元(epoch)号,类似于Paxos中的选票(ballot)
ZAB特性
-
一致性保证
-
可靠提交(Reliable delivery) -如果一个事务 A 被一个server提交(committed)了,那么它最终一定会被所有的server提交
-
全局有序(Total order) - 假设有A、B两个事务,有一台server先执行A再执行B,那么可以保证所有server上A始终都被在B之前执行
-
因果有序(Causal order) - 如果发送者在事务A提交之后再发送B,那么B必将在A之前执行
-
-
只要大多数(法定数量)节点启动,系统就行正常运行
-
当节点下线后重启,它必须保证能恢复到当前正在执行的事务
ZAB的具体实现
-
ZooKeeper由client、server两部分构成
-
client可以在任何一个server节点上进行读操作
-
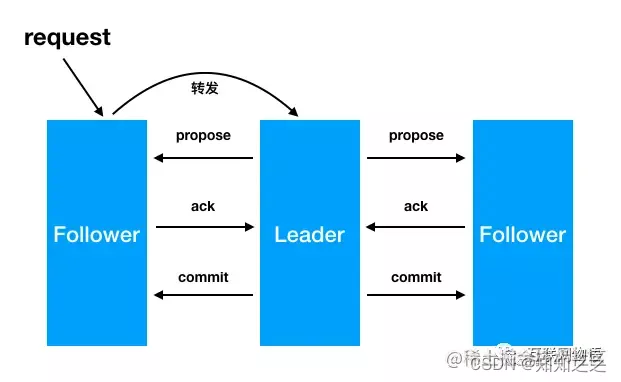
client可以在任何一个server节点上发起写请求,非leader节点会把此次写请求转发到leader节点上。由leader节点执行
-
ZooKeeper使用改编的两阶段提交协议来保证server节点的事务一致性
ZXID
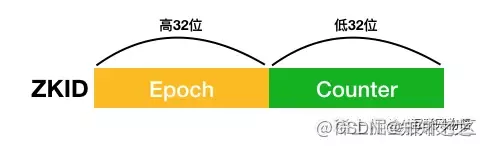
ZooKeeper会为每一个事务生成一个唯一且递增长度为64位的ZXID,ZXID由两部分组成:低32位表示计数器(counter)和高32位的纪元号(epoch)。epoch为当前leader在成为leader的时候生成的,且保证会比前一个leader的epoch大
实际上当新的leader选举成功后,会拿到当前集群中最大的一个ZXID,并去除这个ZXID的epoch,并将此epoch进行加1操作,作为自己的epoch
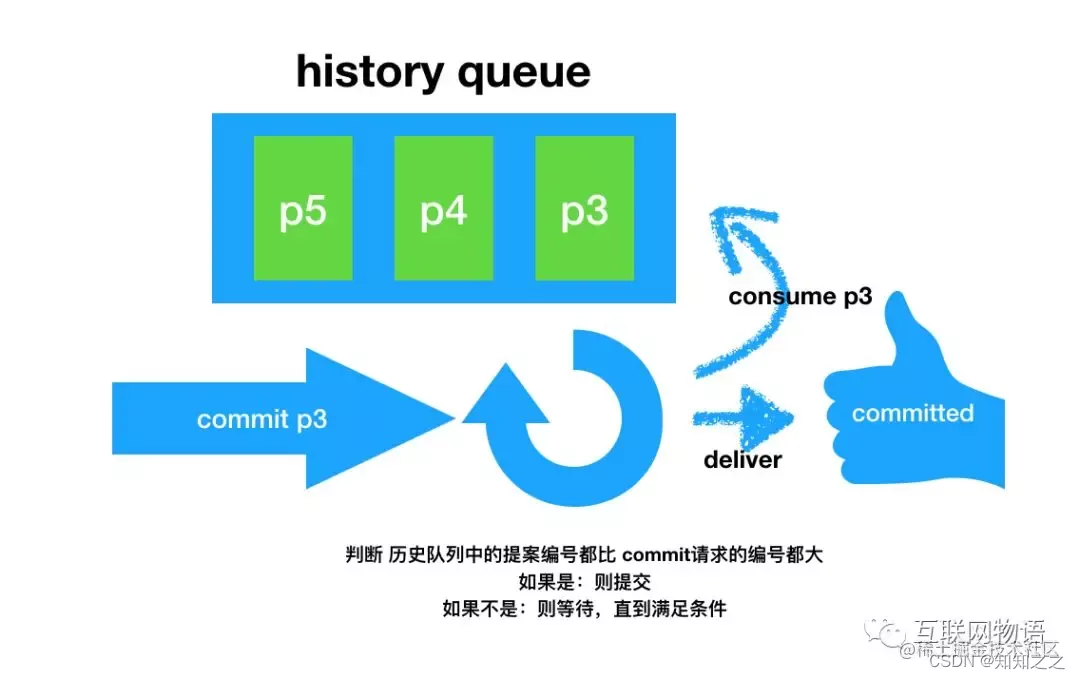
历史队列(history queue)
每一个follower节点都会有一个先进先出(FIFO)的队列用来存放收到的事务请求,保证执行事务的顺序
可靠提交由ZAB的事务一致性协议保证 全局有序由TCP协议保证 因果有序由follower的历史队列(history queue)保证
ZAB工作模式
-
广播(broadcast)模式
-
恢复(recovery)模式
广播(broadcast)模式
-
leader从客户端收到一个写请求
-
leader生成一个新的事务并为这个事务生成一个唯一的ZXID,
-
leader将这个事务发送给所有的follows节点
-
follower节点将收到的事务请求加入到历史队列(history queue)中,并发送ack给ack给leader
-
当leader收到大多数follower(超过法定数量)的ack消息,leader会发送commit请求
-
当follower收到commit请求时,会判断该事务的ZXID是不是比历史队列中的任何事务的ZXID都小,如果是则提交,如果不是则等待比它更小的事务的commit
恢复模式
恢复模式大致可以分为四个阶段
-
选举
-
发现
-
同步
-
广播
恢复过程的步骤大致可分为
-
当leader崩溃后,集群进入选举阶段,开始选举出潜在的新leader(一般为集群中拥有最大ZXID的节点)
-
进入发现阶段,follower与潜在的新leader进行沟通,如果发现超过法定人数的follower同意,则潜在的新leader将epoch加1,进入新的纪元。新的leader产生
-
集群间进行数据同步,保证集群中各个节点的事务一致
-
集群恢复到广播模式,开始接受客户端的写请求
当 leader在commit之后但在发出commit消息之前宕机,即只有老leader自己commit了,而其它follower都没有收到commit消息 新的leader也必须保证这个proposal被提交.(新的leader会重新发送该proprosal的commit消息)
当 leader产生某个proprosal之后但在发出消息之前宕机,即只有老leader自己有这个proproal,当老的leader重启后(此时左右follower),新的leader必须保证老的leader必须丢弃这个proprosal.(新的leader会通知上线后的老leader截断其epoch对应的最后一个commit的位置)

