
热门标签
热门文章
- 1javaassist使用_javaassist $1
- 2GPT-2原理-Language Models are Unsupervised Multitask Learners
- 3基于PHP后台微信校园运动场地预约小程序系统设计与实现(安装部署+源码+文档)
- 4paddlepaddle测试安装_「深度学习系列」PaddlePaddle之手写数字识别
- 5BERT的demo运行_-do eval为true的意思,即会生成模型验证结果文件如下图
- 6反欺诈中所用到的机器学习模型有哪些?
- 73 — NLP 中的标记化:分解文本数据的艺术_标记化技术的参数
- 8华为强制升级鸿蒙,华为手机升级鸿蒙的方法,有哪位升级成功的吗?
- 9HarmonyOS 移动端开发指南:从零到入门,开发你的第一个应用_harmony os 4.0开发教程
- 10自监督学习(self-supervised learning)(20201124)_self-supervised dialogue learning
当前位置: article > 正文
KUKA机器人圆弧指令的两种用法
作者:很楠不爱3 | 2024-04-07 23:01:30
赞
踩
KUKA机器人圆弧指令的两种用法
KUKA机器人通过圆弧指令来实现有圆弧轨迹或整圆轨迹的运动编程,目前KUKA机器人的圆弧指令包括CIRC和SCIRC两种。两种指令都能实现对圆弧轨迹和整圆轨迹的运动编程,但SCIRC圆弧指令相对于CIRC圆弧指令,运动轨迹更优化了一些,而且增加了圆弧的角度设置。
可以通过以下程序示例来进行区别与运用,以下展示实现整圆运动轨迹的两种编程方法。
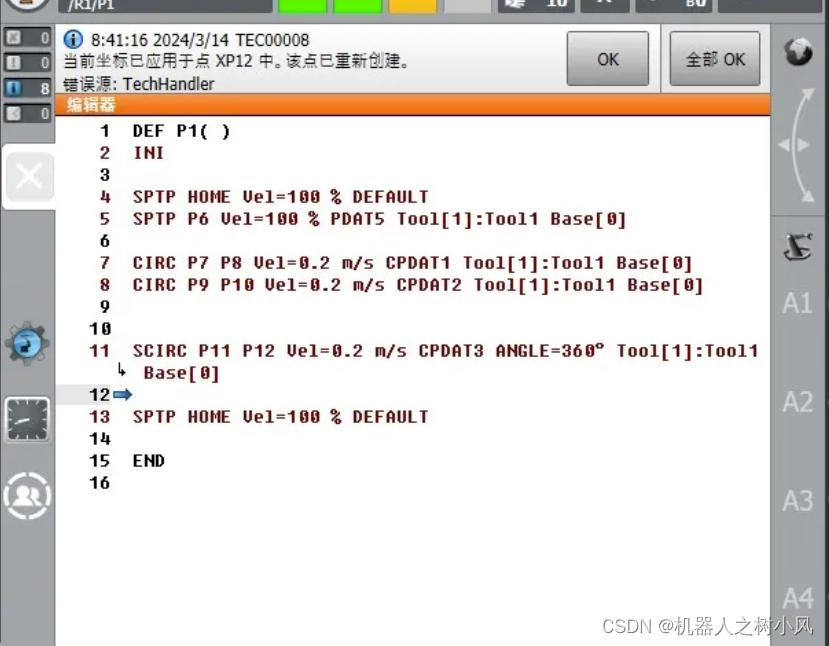
1、通过两个CIRC圆弧指令实现整圆的运动轨迹,两个CIRC圆弧指令画一个圆。

如上图:创建一个P1程序,添加两个CIRC圆弧指令,P7和P9是辅助点,P8和P10是目标点。
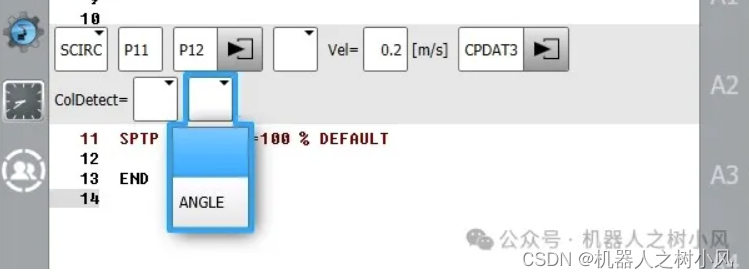
2、通过一个SCIRC圆弧指令实现整圆的运动轨迹编程。
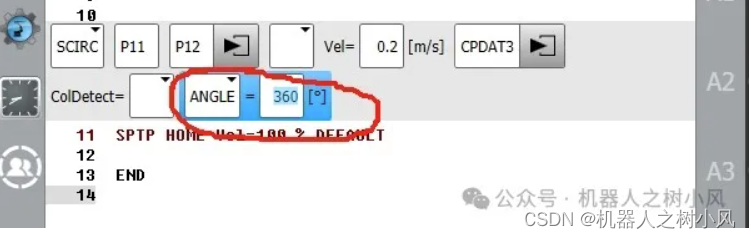
添加SCIRC运动指令,在最后一栏处选择ANGLE(角度);
画整圆时,设置为360度。
将辅助点和目标点确定,Touch Up确定后SCIRC指令添加完成。
3、以下图展示了两种实现整圆运动轨迹编程的方法。
有兴趣的可以添加指令测试一下。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/很楠不爱3/article/detail/381201
推荐阅读
相关标签

