
- 1毕业设计:旅游景点评论数据分析系统+可视化+LDA主题分析+NLP情感分析+Bayes评论分类 计算机毕业设计✅
- 2交叉编译OpenCV2.2.0及移植到Tiny210
- 3mysql_分库、分表、分区详解_mysql 读写分离分库分表
- 4npm install 报错 npm ERR! code 1
- 5python拷贝漫画下载爬虫(附代码github链接)_github 拷贝漫画
- 6delphi 怎么做到翻页滚动显示每一页_写给新手的滚动视差设计指南(附7个教科书级案例)...
- 7详解UART通信协议以及FPGA实现_uart系统框图
- 8AI探索实践8 - 本地运行大模型_本地大模型
- 9js实现前端数据分页_前端自己做分页 js
- 10【C语言】指针篇-一篇搞定不同类型指针变量-必读指南(3/5)
【深入理解java虚拟机】 - JVM垃圾回收算法
赞
踩
对象是否存活?
垃圾收集器在对堆进行回收前,第一件事情就 是要确定这些对象之中哪些还“存活”着,哪些已经“死去”。
判断对象是否存活有以下两种算法:
- 引用计数法
- 可达性分析法
引用计数法
在对象中添加一个引用计数器,每当有一个地方引用它时,计数器值就 +1 ;当引用失效时,计数器值就-1 ;任何时刻计数器为 0 的对象就是不可能再被使用的。
引用计数法原理简单,判定效率也很高,但单纯的引用计数就很难解决对象之间相互循环引用的问题。
例如,存在两个对象象objA和objB,他们都有字段instance,令objA.instance=objB;objB.instance=objA。除此之外,这两个对象再无任何引用,实际上这两个对象已 经不可能再被访问,但是它们因为互相引用着对方,导致它们的引用计数都不为零,引用计数算法也就无法回收它们。
可达性分析法
通过 一系列称为“GC Roots”的根对象作为起始节点集,从这些节点开始,根据引用关系向下搜索,搜索过 程所走过的路径称为“引用链”(Reference Chain),如果某个对象到GC Roots间没有任何引用链相连, 或者用图论的话来说就是从GC Roots到这个对象不可达时,则证明此对象是不可能再被使用的。
固定可作为GC Roots的对象包括以下几种:
- 在方法区中类静态属性引用的对象;
- 在方法区中常量引用的对象;
- 在本地方法栈中(即Native方法)引用的对象;
- 所有被同步锁(synchronized关键字)持有的对象;
- 反映Java虚拟机内部情况的JMXBean、JVMTI中注册的回调、本地代码缓存等。
强、软、弱、虚
- 强引用
程序代码之中普遍存在的引用赋值,例如Object obj=new Object()。无论任何情况下,只要强引用关系还存在,垃圾收集器就永远不会回收掉被引用的对象。 - 软引用
描述一些还有用,但非必须的对象。只被软引用关联着的对象,在系统将要发生内存溢出异常前,会把这些对象列进回收范围之中进行第二次回收,如果这次回收还没有足够的内存,才会抛出内存溢出异常。 - 弱引用
描述那些非必须对象,但是它的强度比软引用更弱一些,被弱引用关联的对象只 能生存到下一次垃圾收集发生为止。当垃圾收集器开始工作,无论当前内存是否足够,都会回收掉只被弱引用关联的对象。 - 虚引用
也称为“幽灵引用”或者“幻影引用”,它是最弱的一种引用关系。一个对象是否有虚引用的 存在,完全不会对其生存时间构成影响,也无法通过虚引用来取得一个对象实例。 为一个对象设置虚引用关联的唯一目的只是为了能在这个 对象被收集器回收时收到一个系统通知。
finalize()
即使在可达性分析算法中判定为不可达的对象,也不是“非死不可”的,这时候它们暂时还处于“缓 刑”阶段,要真正宣告一个对象死亡,至少要经历两次标记过程:
- 如果对象在进行可达性分析后发现没有与GC Roots相连接的引用链,那它将会被第一次标记,随后进行一次筛选,筛选的条件是此对象是否有必要执行finalize()方法(对象中覆盖finalize()方法,并且未被虚拟机调用)。如果这个对象被判定为确有必要执行finalize()方法,那么该对象将会被放置在一个名为F-Queue的 队列之中,并在稍后由一条由虚拟机自动建立的、低调度优先级的Finalizer线程去执行它们的finalize() 方法。
- finalize()方法是对 象逃脱死亡命运的最后一次机会,稍后收集器将对F-Queue中的对象进行第二次小规模的标记,如果对象在finalize()中与引用链上的任何一个对象建立了关联,它仍然可以存活。
【注】
- 任何一个对象的finalize()方法都只会被系统自动调用一次,如果对象面临 下一次回收,它的finalize()方法不会被再次执行;
- 虚拟机会触发finalize方法开始运行,但并不承诺一定会等待它运行结束。
垃圾收集算法
分代收集理论
分代收集指的是:垃圾收集器应该将Java堆划分 出不同的区域,然后将回收对象依据其年龄(年龄即对象熬过垃圾收集过程的次数)分配到不同的区 域之中存储。
据此,一般至少将把Java堆划分为新生代 (Young Generation)和老年代(Old Generation)两个区域。在新生代中,每次垃圾收集 时都发现有大批对象死去,而每次回收后存活的少量对象,将会逐步晋升到老年代中存放。
三个假说:
- 弱分代假说:绝大多数对象都是朝生夕灭的。
- 强分代假说:熬过越多次垃圾收集过程的对象就越难以消 亡。
- 跨代引用假说:跨代引用相对于同代引用来说仅占极少数。
标记—清除算法
标记-清除算法分为“标记”和“清除”两个阶段:首先标记出所有需要回 收的对象,在标记完成后,统一回收掉所有被标记的对象,也可以反过来,标记存活的对象,统一回收所有未被标记的对象。

缺点:
- 执行效率不稳定,如果Java堆中包含大量对 象,而且其中大部分是需要被回收的,这时必须进行大量标记和清除的动作,导致标记和清除两个过 程的执行效率都随对象数量增长而降低;
- 内存空间的碎片化问题,标记、清除之后会产生大量不连续的内存碎片,空间碎片太多可能会导致当以后在程序运行过程中需要分配较大对象时无法找 到足够的连续内存而不得不提前触发另一次垃圾收集动作。
标记-复制算法
标记-复制算法:将可用内存按容量划分为大小相等的两块,每次只使用其中的一块。当这一块的内存用完了,就将还存活着的对象复制到另外一块上面,然后再把已使用过的内存空间一次清理掉。
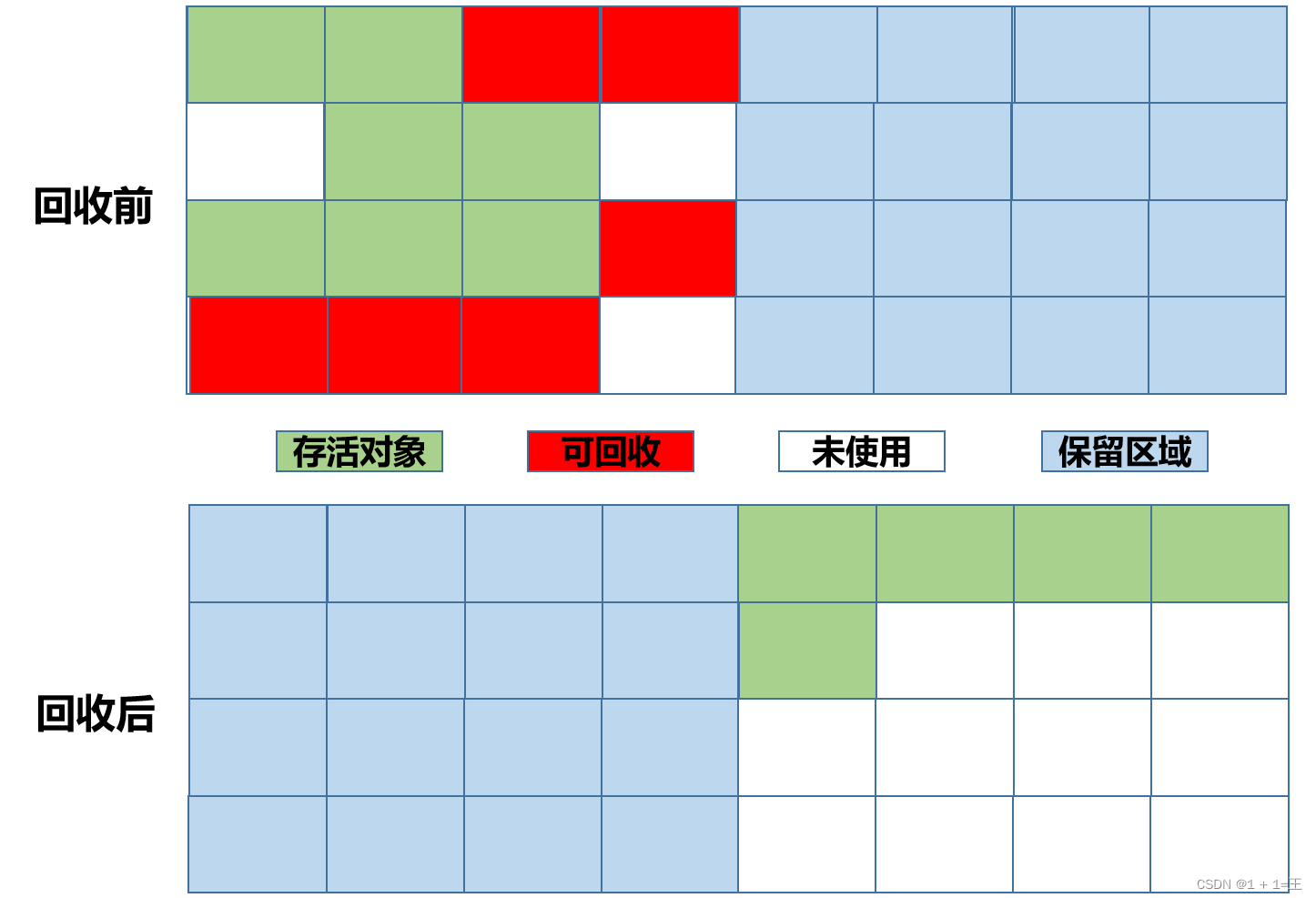
如果内存中多数对象都是存 活的,这种算法将会产生大量的内存间复制的开销,但对于多数对象都是可回收的情况,算法需要复 制的就是占少数的存活对象,而且每次都是针对整个半区进行内存回收,分配内存时也就不用考虑有 空间碎片的复杂情况,只要移动堆顶指针,按顺序分配即可。这样实现简单,运行高效,但可用内存缩小为了原来的一半。
标记-整理算法
标记-整理算法:其中的标记过程仍然与“标记-清除”算法一样,但后续步骤不是直接对可 回收对象进行清理,而是让所有存活的对象都向内存空间一端移动,然后直接清理掉边界以外的内存。

缺点:
- 移动存活对象并更新 所有引用这些对象的地方将会是一种极为负重的操作,而且这种对象移动操作必须全程暂停用户应用 程序才能进行。
其他
由以上几种算法可以看出:是否移动对象都存在弊端,移动则内存回收时会更复杂,不移动则内存分配时会 更复杂。从垃圾收集的停顿时间来看,不移动对象停顿时间会更短,甚至可以不需要停顿,但是从整 个程序的吞吐量来看,移动对象会更划算。
此外就出现了另一种解决方案:
- 可以不在内存分配和访问上增加太大额外负担,做法是让虚 拟机平时多数时间都采用标记-清除算法,暂时容忍内存碎片的存在,直到内存空间的碎片化程度已经 大到影响对象分配时,再采用标记-整理算法收集一次,以获得规整的内存空间。
垃圾回收算法细节实现
根节点枚举
在可达性分析中固定可作为GC Roots的节点主要在全局性的引用(例如常量或类静态属性)与执行上下文(例如 栈帧中的本地变量表)中,但查找过程要做到高效并非一件容易的事情。也会造成“Stop The World”的问题。
HoeSpot虚拟机的解决方案是:使用一组称为OopMap的数据结构来达到这个目的。一旦类加载动作完成的时候, HotSpot就会把对象内什么偏移量上是什么类型的数据计算出来,在即时编译过程中,也 会在特定的位置记录下栈里和寄存器里哪些位置是引用。这样收集器在扫描时就可以直接得知这些信 息了,并不需要真正一个不漏地从方法区等GC Roots开始查找。
安全点
在OopMap的协助下,HotSpot可以快速准确地完成GC Roots枚举,但如果为每一条指令都生成 对应的OopMap,那将会需要大量的额外存储空间。
所以HotSpot虚拟机并不会为每条指令都生成OopMap,只是在“特定的位置”记录 了这些信息,这些位置被称为安全点。
由于安全点的存在决定了用户程序执行时,并非在代码指令流的任意位置都能够停顿下来开始垃圾收集,而是强制要求必须执行到达安全点后才 能够暂停。
那么,如何在垃圾收集发生时让所有线程都跑到最近的安全点,然后停顿下来呢?这里提供了两种方案:
- 抢先式中断:在垃圾收集发生时,系统首先把所有用户线程全部中断,如果发现有用户线程中断的地 方不在安全点上,就恢复这条线程执行,让它一会再重新中断,直到跑到安全点上。
- 主动式中断:当垃圾收集需要中断线程的时候,不直接对线程操作,仅仅简单地设置一 个标志位,各个线程执行过程时会不停地主动去轮询这个标志,一旦发现中断标志为真时就自己在最 近的安全点上主动中断挂起。
安全区域
安全区域是指能够确保在某一段代码片段之中,引用关系不会发生变化,因此,在这个区域中任 意地方开始垃圾收集都是安全的。我们也可以把安全区域看作被扩展拉伸了的安全点。
当用户线程执行到安全区域里面的代码时,首先会标识自己已经进入了安全区域,那样当这段时 间里虚拟机要发起垃圾收集时就不必去管这些已声明自己在安全区域内的线程了。当线程要离开安全 区域时,它要检查虚拟机是否已经完成了根节点枚举,如果完成了,那线程就当作没事发生过,继续执行;否则它就必须一直等待,直到收到可以 离开安全区域的信号为止。
记忆集与卡表
记忆集是一种用于记录从非收集区域指向收集区域的指针集合的抽象数据结构。
它是为了解决分代收集理论中,对象跨代引用所带来的问题,而在新生代中建 立了名为记忆集的数据结构,用以避免把整个老年代加进GC Roots扫描范围。
卡表是实现记忆集的一种方式。
记忆集是一种“抽象”的数据结构,它只定义了记忆集的行为意图,并没有定义其行为的具体实现。卡表就是记忆集的一种具体实现,它定义了记忆集的记录精度、与堆内存的映射关系等。

