
- 1Python——验证椭圆曲线加密点乘运算_椭圆曲线点乘代码实现 python
- 2C#读取Excel的三种方式以及比较_oledb npoi 哪个快
- 3点击按钮获取input里面的值_button获取input的值
- 42023AI会议时间表(持续更新)
- 530天拿下Python之基础语法
- 6IMX6ULL学习笔记(5)——获取和编译U-Boot_imx6ull uboot编译spl吗
- 7数据结构——01-抽奖数人-链表-实验题目与解答
- 8通道注意力ECA-Net--CVPR2020_改通道注意力
- 9html跳动的心,css3跳动的心制作
- 10Windows 10安装OpenAI的Gym_open ai gym安装
F450四旋翼搭建_无人机电机安装顺序
赞
踩
这次是用Pixhawk飞控搭建四旋翼!
一、底板焊接
将四个电调以及XT60电源线焊接在底板上,注意线穿过底板留出的孔,红白线对应正负极,同时焊点不能太大,会阻挡以后电池的安装。
二、电机香蕉头焊接和套上热缩管
香蕉头可以拿老虎钳固定住灌锡。
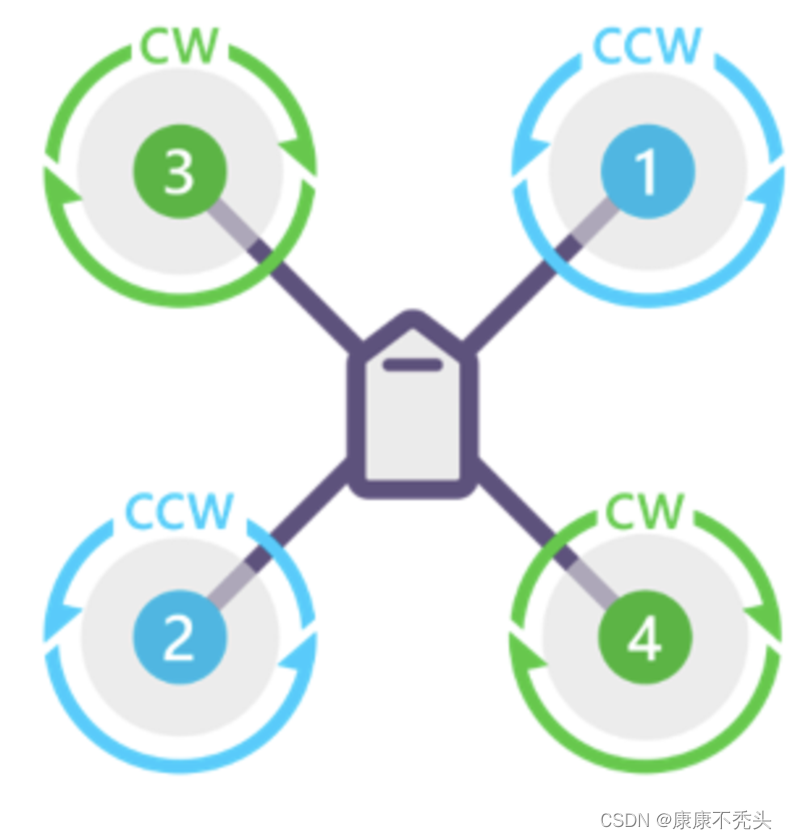
三、安装电机和电调
CW表示电机顺时针旋转,CCW表示逆时针旋转。相同颜色的机臂上分别装一个CW和一个CCW,CCW的电机放在1,2位置,CW的电机放在3,4位置。
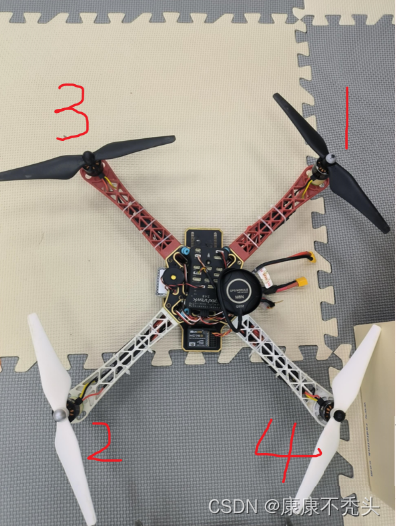
四、安装机臂和上板
选好机头方向,一般前面的两机臂一个颜色,后面的两机臂另外一个颜色(我的前面是红色,后面是白色)。固定电机用的M3的螺丝,固定机臂用的M2的螺丝,多余的电线整理好了用扎线带绑好了固定在机臂上。
五、飞控及配件的安装
包括飞控(安装好SD卡)、蜂鸣器、接收机以及GPS(注意箭头指向机头方向)。GPS注意安装位置不要挡住飞控的USB口,引脚分别接IIC和GPS。接收机最右边为地(接RC_IN口),而飞控的最上方为地,电调的三根线也分别按顺序接到飞控上。
安装电流计(电流计的作用是给飞控提供稳定的5V电源,并且测量电池电压和电流),引脚连接在power上。
六、调试与试飞
打开QGC下载固件,校准遥控器、陀螺仪以及加速计。同时也要校准电调油门,否则会出现电机不同时转的情况。
调试的差不多的时候,就可以安装桨叶了。注意桨叶凸起的颜色,银色表示桨叶是逆时针旋转,安装到1,2机臂上(需要逆时针拧才能拧上去);黑色表示桨叶是顺时针旋转,安装到3,4机臂上(需要顺时针拧才能拧上去),如果拧错就会发生侧翻事故。
七、遇到的问题
P1:无人机连接电脑的时候就起飞
遥控器校准的时候两个摇杆都应该回归居中位置,按照提示打摇杆,最后测试校准结果是否正确。
还有连接电脑的时候千万不要带桨叶!!!
P2:无人机一解锁就起飞
怠机电机转速过大,在parameter中搜索PWM_MAIN_MIN,适当降低(我的本来是1200,改成1000后正常解锁)。

