
热门标签
热门文章
- 1git忽略文件不生效_git忽略文件不起作用
- 2一站式低代码开发平台iVX初探_ivx开放平台
- 3用链表实现栈(Java语言)_java语言链表实现栈
- 4python arma_只需一行代码!Python中9大时间序列预测模型
- 5spring注解:spring aop注解详解
- 6ZooKeeper分布式锁实现java例子,附完整可运行源代码_java zeekeeper实现分布式锁
- 7golang template: “xxx.html“ is an incomplete or empty template 解决方法
- 8结合TextIn和Springboot实现图片识别_springboot颜色识别
- 9NSError代码错误列表_ns error net reset
- 10以太坊(Ethereum) - 连接公链_ethereum公链
当前位置: article > 正文
卡尔曼滤波获取MPU6050欧拉角_卡尔曼滤波mpu6050角度
作者:很楠不爱3 | 2024-05-25 19:29:28
赞
踩
卡尔曼滤波mpu6050角度
目录
2、1首先需要读取原始数据,按照公式计算出加速度和角速度,最后在减去对应轴的偏移量得到最终数值。
4、1计算加速度的Roll角、Pitch角(MPU6050加速度计求不到Yaw角)。计算角速度的Roll角、Pitch角、Yaw角。
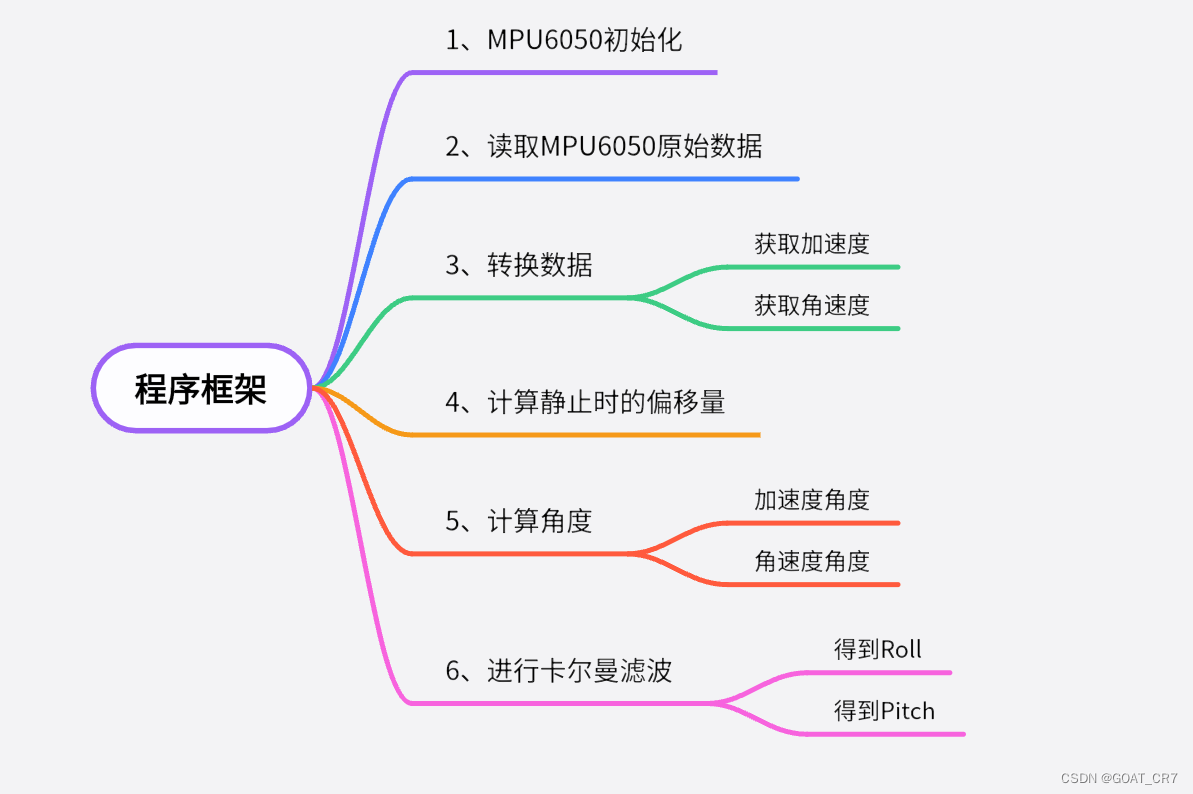
一、程序框图
获取欧拉角需要提前读取MPU6050的原始数据,读取到之后需要将原始数据转换成对应的加速度值和角速度值,在求角度之前需要对MPU6050进行零点校准。通过加速度可以求出 Roll 和 Pitch ;通过角速度可以求出Roll 、Pitch、Yaw,最后加速度角度和角速度角度通过卡尔曼滤波得到最终角度。
二、代码部分
推荐阅读
相关标签

