
- 1每周荐书:OpenCV、自然语言、SpringBoot2_springboot2书籍
- 2目标检测算法——YOLOV9——算法详解_yolov9系列算法总结
- 3如何使用 MiniGPT-v2_minigptv2在线使用
- 4下采样是什么_下采样是什么意思
- 5HNU_AI_实验3--分类算法实验
- 6Sqoop测试命令_linux如何测试sqoop是否能够成功连接数据库
- 7快速排序(Java)
- 8鸿蒙开发岗位,面试到底问些啥?_鸿蒙项目面试(1),2024年最新2024历年网易跳动HarmonyOS鸿蒙面试真题解析_hongmeng面试题
- 9Access,Mysql数据库速度测试_access的处理速度
- 10怎么部署个人云服务器?保姆级教程_部署私人服务 什么方式最好
微电网模拟系统方案分享_电网模拟器的硬件框图
赞
踩
前言
研究目的及要求
掌握正弦波逆变器的电路的组成,重点明白其中中各元器件的原理及用处,对正弦波逆变电路在电阻负载、电阻电感负载是的工作情况及其波形作全面分析,并研究工作频率对电路工作波形的影响。采用SPWM控制方式对逆变桥进行调制,最后经电容、电感过滤实现正弦波逆变的目的。
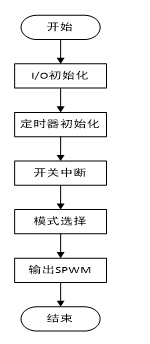
内容概述
本文主要从系统分析、硬件设计、程序设计和实验测试四个方面阐述“三相SPWM逆变电路的设计”。开始概述逆变器基本概念原理和SPWM控制技术,硬件设计介绍本次设计系的统结构框图,简要说明了单片机的选型、半桥驱动电路等,软件设计主要说明本设计的程序流程图;实验部分通过对设计电路的测试,说明试验结果。
系统分析
逆变器的基本概念与工作原理
正弦波逆变器的电路构成

如图所示,本电路由两部分组成,将交流转化为直流的这个部分属于整流,整流器的作用是把交流电转化为直流电,这个过程可以是不可控的,也可以是可控的,这部分采用不可控的二极管将交流变成直流。整流之后采用用电容进行滤波,滤波器的作用是将波动的直流量过滤成平展稳定的直流量,整个过程无论是从结构上还是性能上都能满足实验要要。最后直流变交流的部分为逆变部分,逆变器的作用是将直流电转化为交流电经过电感滤波后然后供给负载,这里的LC滤波是为了滤除高次谐波,得到到正弦波,而逆变器因为它输出的电压和频率与输入的交流电源无关所以为称为无源逆变器,它是正弦波逆变电路的核心,这里采用采用三相桥式逆变电路,用PWM控制调节输出电压及频率的大小。
常用的逆变器调压方法:
可控整流器调压:通过负载对电压的要求,使用可控的整流器来完成对逆变器输出电压的调节。
直流斩波器调压:在确定逆变器的电源侧有较高功率的情况下,通过不可控整流器可以 在直流环节中通过设置改变直流斩波器来进行对电压的调节。
逆变器自身调压:在采用不可控整流器的前提下逆变器能用自身的电子开关进行斩波控制,这样就可以得到脉冲列,通过改变输出电压脉冲列的脉冲宽度,就可达对输出的电压进行调节,这种方法被称为脉宽调制(PWM)。
逆变器的基本类型
如果是直流输入端滤波器,那么它可以分为两种,分别是电流型和电压型,其中电流型逆变器它的中间部分采用的是大电感进行滤波,这样的输入电流的特点是具有阻抗大电流平,就仿佛似电流源,而电压型逆变器的中间部分则采用大电容进行滤波,这样的逆变器的输入电压的特点是阻抗小且电压平直,就仿佛电压源。而如果按电子开关的频率进行区别则同样可分为 两种分别是120°的导电型逆变器和180°的导电型逆变器。
PWM控制技术
PWM控制技术翻译过来就是脉宽调制技术,它是原理是假如有一系列的脉冲想要变成需要的波形,那么就可以通过等效法对脉冲的宽度进行改变来等效着获得需要的波形,波形包含形状和幅值,这种控制的想法来源于于通信技术。随着全控型器件的飞速发展可以十分轻松的把PWM控制技术实现,而且这种PWM控制技术在电力电子类方面的用处非常大且极其普遍,各种电力电子装置通过使用它而在性能方面得到了极大的改变,所以它在电力电子技术的整个历史拥有着举足轻重的地位,而PWM控制技术能在电力电子技术中拥有这种举足轻重的地位主要还是因为它在逆变电路中被完美的应用了,直到目前为止PWM控制技术被普遍采用与各式各样的逆变电路。
PWM控制技术的面积等效方法
PWM控制技术的理论基础就是面积等效法,而面积等效法的核心思想就是假如把一系列具有相同冲量但是形状不一的窄脉冲施加在一个具有惯性的环节上,那么它们的效果就基本上是一样的,在这里相同的冲量其实就是相同的面积如图2.3.1。

2.3.1正弦波正半周的等效PWM波图
在正弦波的负半周上使用等面积法依旧可得到PWM波形,所以在一个完的整周期内正弦波的等效PWM波如图2.3.2所示。

2.3.2单极性调制等效正弦波的SPWM波图
目前还有一种被采用更多的等效方式,用的也是等面积发如图2.3.3所示。
2.3.3双极性调制等效正弦波的SPWM波图
基于PWM控制技术的逆变电路
至今为止PWM控制技术已被运用到了大多数的逆变电路之中,这种逆变电路既有电流型又电压型而后者被用到的更多。有两种方法法可以获得PWM波形,它们分别是通过计算获得和通过调制获得,其中前者是根据正弦波的一系列数据进行精确计算得出每个脉冲的宽度和他们之间的间隔,以此来操控开关器件的通断来得到PWM波形;而后者是把调制信号的比作想要输出的波形,通过对信号进行调制来得到想要的PWM波形。
双极性PWM调制技术
按一定方法对电压的输出脉冲列里面的各脉冲宽度进行改变从而使得使电压的输出脉冲列在周期内的时间相对于均值按正弦的规律变化,这就是SPWM,这种技术把等腰三角波电压当做载波信号,而调制信号则用正弦波电压,最后把这两种信号进行比对,以此来确定每个分段的矩形脉冲的宽度。
因为三角波和正弦波的区别主要源于它们的极性是不一样的,所以可以把SPWM分为单极性和双极性的,在这次设计中采用的三相桥式逆变电路,这种逆变电路两种调试方式都可以使用,在这里采用了双极性PWM调制技术的方法,它的原理如图2.3.4所示。

2.3.3双极性PWM原理
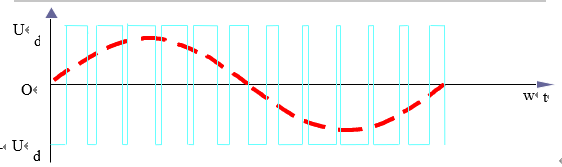
在采用双极性PWM调制技术时候,把信号波用这种方法得到的交流正弦输出波替代同时把载波用三角波替代,将这二者进行对比,各开关的通断在这两种波的交点时刻进行改变,由此可以看出在信号波的一个周期内,无论是载波还是调制来的输出波形都是正负皆有,所以它其输出波形具有±Ud两种电平,把信号波和载波分别用ur和uc来表示,当信号波大于载波的时刻,同时施加开通和关断信号,其中开通信号给V1和V4关断信号给V2和V3,此时如果io是大于零的那么V1和V4开通反之则是VD1和VD4开通,但是它们的电压输出都是uo等于Ud。同理当载波大于信号波的时候,那么用同样的方法可以得到V2和V3或着VD2和VD3开通的结果,不同的是它们的电压输出却是uo等于负的Ud。
SPWM逆变器的工作原理
SPWM逆变器的主题思路就是有一个逆变器,希望它输出的电压波形是正弦的,因为至今为止以现在的技术造出的可以改变频率和电压的逆变器无法像正弦波逆变器那样的小体积大功率且输出波形光滑。
现在的SPWM逆变器都采用的是等效原理实现的,即让逆变器输出的波形是一系列的和正弦波一样效果的虽不等宽但等幅的矩阵脉冲波形,它的主题思想方法就是等面积法。
硬件设计
本正弦波逆变器主要用的是SPWM控制技术,整体的电路具有简单的结构而且在机械特性方面也表现良好同时价格也比较低廉,这样的设计能完美达到题目的需求并且已经在各种相关的行业里被普遍采用。
总体原理图
本系统主要采用的硬件滤波电路、三相全桥逆变电路、LC滤波器、单片机、按键设置电路、显示模块、电压检测电流,电流检测电路以及一些外围电路,具体系统框图如图3.1所示。

3.1系统框图
电路原理图

3.2主回路原理图
从图3.2中可以看出,直流电输入后,先通过2个电容串联构成的滤波电路,得到输入电压的一半作为中点电位,作为三相输出的参考地。在逆变的部分采用了6个金属氧化物半导体管(即MOS管)组成了一个三相桥式逆变电路,最后使用用双极性的调制方式进行调制,输出的SPWM波形过经电感、电容组成的LC滤波器滤除高次谐波,最后在负载就能获得三相的纯正弦波交流电压输出。
单片机的选择
本设计所采用的单片机是STC15F2K60S2,它能使系统的到充分的实现,内部自带高精度(0.4%)内部振荡器,它还拥有38个I/O口,该单片机内置上电复位电路,有8路10位ADC模数转换、每个I/O能设置成输入输出模式,并且具有具有3路PWM输出,通过软硬件设计,实现多功能的电机控制。且性价比高,抗静电,抗干扰,低功耗,低成本。
滤波电路
滤波电路的作用是把直流电压过滤,过滤掉其中不平整的脉动,这样的目的是确保之后的电路环节能得到优秀质量的电压或电流,本电路的滤波电路部分采用的是电容滤波电路。虽然从理论上来讲只要电容值越大那么过滤的效果就越好,但是出于对实际的考虑无论结构上还是价值上都不能这样,所以要计算电容的实际大小。
通过2个电容串联构成的滤波电路,得到输入电压的一半作为中点电位,作为三相输出的参考地。
场效应管的选择
如图3.3所示的三相全桥电路,其电路中需要用到6个场效应管,电路的A端和B端都要与用电器连接。由于是市电接入所以要选用拥有足够大耐压值的场效应管,本设计选用540场效应管即33A 110V的场效应管,这种场效应管无论是从耐压方面考虑还是从通断时间方面考虑都能满足设计的要求。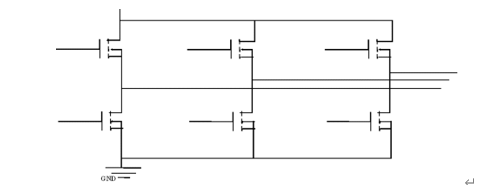
驱动电路的选择
方案一: 基于三极管等元件组成的驱动电路,这种驱动电路的好处是价格便宜且结构简单,但是本设计的要求的驱动电路必须高于电源电压的电路,所以如果选择这种驱动电路就需要再为它增加一个驱动电源,这无疑增加了设计的难度。
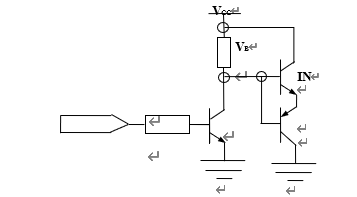
3.4三极管分立元件驱动电路
方案二: 半桥式驱动电路,本全桥驱动电路采用IR2104作为它的驱动芯片,该芯片的优点是结构简单性能可靠并且能即大的提升电路的稳定性且降低了设计难度。该芯片采用被动式泵荷升压原理。上电时,电源流过快恢复二极管D向电容C充电,C上的端电压很快升至接近Vcc,这时如果下管导通,C负级被拉低,形成充电回路,会很快充电至接近Vcc,当PWM波形翻转时,芯片输出反向电平,下管截止,上管导通,C负极电位被抬高到接近电源电压,水涨船高,C正极电位这时已超过Vcc电源电压。因有D的存在,该电压不会向电源倒流,C此时开始向芯片内部的高压侧悬浮驱动电路供电,C上的端电压被充至高于电源高压的Vcc,只要上下管一直轮流导通和截止,C就会不断向高压侧悬浮驱动电路供电,使上管打开的时候,高压侧悬浮驱动电路电压一直大于上管的S极。采用该芯片降低了整体电路的设计难道,只要电容C选择恰当,该电路运行稳定。
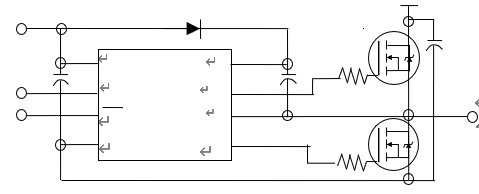
3.4基于IR2104的半桥驱动电路
因为本设计的要求是简单的结构和稳定的电路,无疑第二种方法最能达到要求,所以就选择方案二。
逆变器工作模式的控制策略
本设计共有两组逆变器,通过按键切换电路的工作模式,具体流程如下图所示。
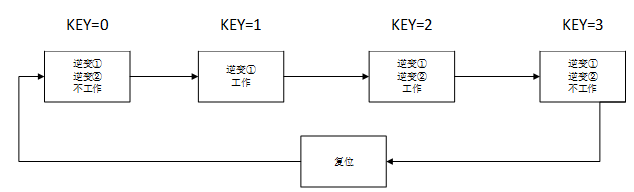
图二 逆变器工作流程图
程序设计
程序选择说明
要完成本正弦波逆变器的设计除了硬件方面的设计还需要进行开软件的设计,为了实现单片机的各种功能,软件程序的编制是不可缺少的。对于本系统的软件编程主要有两种编程语言,分别是汇编和C语言。汇编语言的优点是运行速度快但它也存在但难编程和难调试的缺点,而作为准高级语言的C语言却具有良好的可读性,并且调制过程调试简单明了还有很好的移植性好,所以本系统采用C语言来编写程序,MPLAB IDE v8.83作为集成开发环境。
SPWM的分析与计算
自然取样法的主要问题是SPWM波形每一个脉冲的起始和结束时刻t_A和t_B对三角载波的中心线不对称,因而求解困难,工程长实用的方法要求计算简单,误差不是很大,因此对自然取样法进行一些近似的处理,得出了各种规则采样方法。
规则采样法式波形发生器通过编程方法实现的几种方式之一,这种方式PWM波产生的谐波小,在三相异步电动机变频调速系统中,通常采用此种方法。
在三角波的一个周期内,只利用三角波的一个峰值点所对应的正弦函数求值的脉冲以三角波的峰值点对称,因此这种采样法称规则采样法,如图一所示。

图一生成SPWM波的规则采样
若以单位量1代表三角载波的幅值Uc,则正弦波的幅值Um就是调制度m,m=U_m/U_c ,再由图1几何关系可知:
脉宽时间:T_on=T_a/2[1+Msin(2πK/N)]
间隙时间:T_off=1/2(T_c-T_on)
根据脉宽时间计算公式,如果一个周期内有N个矩形波,载波比N=f_c/f_m ,则 第i个矩形波的占空比:
D_i=1/2[1+m(sin(i*2π/N))]
可见,在已知载波周期Tc、正弦波电压Um或m以及每个特定时刻的函数值,便可以计算出第i个脉宽时间和间隙时间
SPWM查表
根据正弦波的一系列数据进行精确计算得出每个脉冲的宽度和他们之间的间隔,以此来操控开关器件的通断来得到PWM波形。
SPWM算法按照规律采用法需要按相同角度步进将正弦波分成等分,本设计将一个正弦波平均分成分成300等分,计算余弦数值得到一系列数据,并将数据做成程序列表,存储进单片机的ROM里面。
uchar code pwm[]={
127,124,122,119,116,114,111,108,106,103,100,98,95,93,90,87,85,82,80,77,75,73,70,68,65,63,61,58,56,54,52,50,47,45,43,41,39,37,36,34,32,30,28,27,25,23,22,20,19,18,16,15,14,12,11,10,9,8,7,6,5,4,4,3,2,2,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,2,2,3,4,4,5,4,7,8,9,10,11,12,14,15,16,18,19,20,22,23,25,27,28,30,32,34,36,37,39,41,43,45,47,50,52,54,56,58,61,63,65,68,70,73,75,77,80,82,85,87,90,93,95,98,100,103,106,108,111,114,116,119,122,124,127,130,132,135,138,140,143,146,148,151,154,156,159,161,164,167,169,172,174,177,179,181,184,186,189,191,193,196,198,200,202,204,207,209,211,213,215,217,218,220,222,224,226,227,229,231,232,234,235,236,238,239,240,242,243,244,245,246,247,248,249,250,250,251,252,252,253,253,254,254,254,255,255,255,255,255,255,255,255,255,254,254,254,253,253,252,252,251,250,250,249,248,247,246,245,244,243,242,240,239,238,236,235,234,232,231,229,227,226,224,222,220,218,217,215,213,211,209,207,204,202,200,198,196,193,191,189,186,184,181,179,177,174,172,169,167,164,161,159,156,154,151,148,146,143,140,138,135,132,130,127}; // 反正弦变化
要使得其输出三个相位,相移120°的正弦波形的话,那么三个波形的起始位就得相距离0,n/31,n/32,也就是0,100,200.
主程序流程
主程序里面是状态位,4个状态。
状态1:模块1关,模块2关
状态2:模块1开,模块2关
状态3:模块1关,模块2关
状态4:模块1开,模块2开
调回状态1

定时器中断程序
在定时器中断程序中,通过查表的方式,得到一个单极性SPWM波形。
具体而言,是设定好50HZ输出正弦波输出频率,一个正弦波分辨率为300,这300个数据对应的是一个正弦波中的SPWM的占空比。那么每个占空比保持的时间是(1/50/300)66.666us。
那么定时器我们设置为每66.666us进入一次中断,每进来一次就将此时对应的数组里面的数据赋给硬件PWM,给半桥输入SPWM控制信号,当次数超过299次后,数组又回到最开始,三个半桥都如此执行(只是起始数不一样,也就是0,100,200.)。这样循环往复,就得到一个3个完整,相移120°的SPWM波形。经过LC滤波器后,就得到3个完美的正弦波。
关键程序:
/**********************************************************
函数说明: 定时器0中断
**********************************************************/
void Timer0Interrupt(void) interrupt 1
{
TH0 = 0xFF; //重装定时器初始值高8位
TL0 = 0xBF; //重装定时器初始值低8位
index_1++; //A相位查表数值
index_2++; //B相位查表数值
index_3++; //C相位查表数值
CCAP0H = CCAP0L = pwm[index_1];
CCAP1H = CCAP1L = pwm[index_2];
CCAP2H = CCAP2L = pwm[index_3];
if(index_1>299) index_1=0;
if(index_2>299) index_2=0;
if(index_3>299) index_3=0;
}
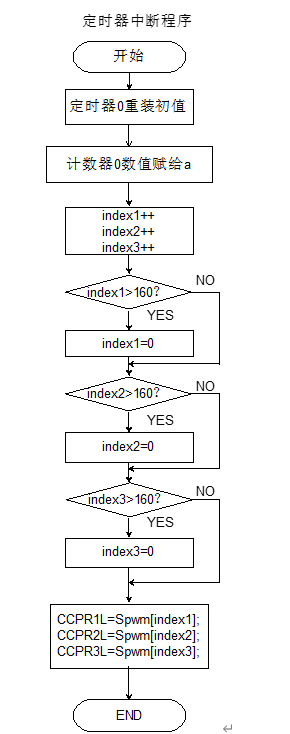
4.2中断流程图
按键程序
按键程序中主要是控制机器的逆变H桥的工作的使能,按第一下,H桥工作,再按下后取反,H桥停止工作。
系统测试
系统仿真
Proteus软件是英国Lab Center Electronics公司出版的EDA工具软件(该软件中国总代理为广州风标电子技术有限公司)。它不仅具有其它EDA工具软件的仿真功能,还能仿真单片机及外围器件。它是目前比较好的仿真单片机及外围器件的工具。虽然目前国内推广刚起步,但已受到单片机爱好者、从事单片机教学的教师、致力于单片机开发应用的科技工作者的青睐。
Proteus是世界上著名的EDA工具(仿真软件),从原理图布图、代码调试到单片机与外围电路协同仿真,一键切换到PCB设计,真正实现了从概念到产品的完整设计。是目前世界上唯一将电路仿真软件、PCB设计软件和虚拟模型仿真软件三合一的设计平台,其处理器模型支持8051、HC11、PIC10/12/16/18/24/30/DsPIC33、AVR、ARM、8086和MSP430等,2010年又增加了Cortex和DSP系列处理器,并持续增加其他系列处理器模型。在编译方面,它也支持IAR、Keil和MATLAB等多种编译器。
于是做了基于proteus的仿真,如下所示。


由于三相变频的数据量很大,所以导致运行的时候会卡机,导致LC出来的正弦波有些地方有断层,不过这个不重要,仿真只是为了验证电路和程序的可行性。
根据仿真结果,证明这个目前设个设计的电路和程序是可行的。于是根据仿真做出实物作进一步研究。
单片机输出波形测试
测试方法
第一步:将双通道示波器的两个探针接在单片机输出PWM的引脚;
第二步:记录波形数据;
第三步:改变单片机输出SPWM的频率,返回第一步操作,直到调出50HZ的SPWM波测试完。
测试结果
由于三相的板子有3个输出端,而我们实验室只有双通道的示波器,所以只能测试其中的2个通道,得到的SPWM波形如图3所示。将该波形经过LC滤波后出来的波形如图4所示。
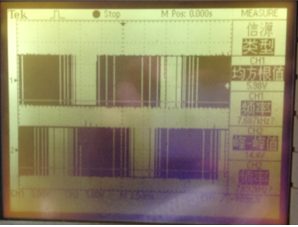
图3 单片机输出的SPWM波

图4 单片机输出的SPWM经过LC滤波后出来的波形

测试结论
通过测试结果可以看出,该逆变器可以输出三相的50HZ的正弦波电流。另外地本系统外接LCD显示及按键,可手动设定电源输出电压频率,并实时显示输出电压、电流、功率和交流电压的效率。同时该系统具有过流保护功能,可以在输出大于2A电流的情况下切断交流输出,大大增加了系统的安全性和稳定性。
总结
结论总结
SPWM逆变电源设计全面阐述了正弦波逆变器的基本结构、驱动原理以及硬件软件的设计。本文所设计的基于PIC单片机的正弦波逆变器具有硬件结构简单、保护功能完善等特点。主要实现了如下功能:
(1)采用STC15F单片机作为控制核心,加强智能控制;
(2)具有安全控制系统,能实现了系统的过流保护、堵转保护;
(3)设计了驱动电路、控制电路的设计,提高系统的可靠性:
(4)系统软件采用模块化设计,为二次开发提供了非常便利的条件。
存在问题
由于时间和能力方面的限制,本文所设计的正弦波逆变器还有进一步改善的方法,使系统具有更好的灵活性和稳定性。

