
热门标签
热门文章
- 1git fetch-pack: invalid index-pack output
- 2决定放弃uniapp开发了,因为它实在是没有taro友好_为啥开发app不建议uniapp
- 3微信营销和微博营销有什么不同_微信营销和微博营销的区别
- 4使用Navicat Premium 12备份、迁移数据库_navicat premium 12备份数据库
- 5计算机毕设 大数据二手房数据爬取与分析可视化 -python 数据分析 可视化_链家二手房数据爬取数据可视化
- 6PostgreSQL之SELECT...GROUP BY...HAVING
- 7python的tkinter插入图片_Python3 Tkinter基础 Text Photoimage 文本框中插入一张图片
- 8vxworks gcc linux,【经验共享】GCC3.4.4(vxWorks6.4)较以前版本的改动
- 9“MBTI性格测试与职场发展:如何挖掘你的潜力?“(包含开源免费的API接口)_获取信息方式 直觉 实感
- 10论文详解KnowledGPT: Enhancing Large Language Models with Retrieval and Storage Access on Knowledge Bases
当前位置: article > 正文
STM32 Simulink 自动代码生成电机控制:基于反电动势观测器的锁相环设计_simulink电控观测器接入后电机无法正常运行
作者:很楠不爱3 | 2024-06-12 08:44:49
赞
踩
simulink电控观测器接入后电机无法正常运行
目录
锁相环设计
全阶滑模的锁相环和前面的非线性磁链观测器锁相环原理类似,同样反正切函数计算方法包含除法运算,尤其是当反电动势观测值过零时,转子位置观测误差会进一步放大,这里采用锁相环来计算角度和电机速度。不同于磁链的锁相环,这里输入的从反电动势公式(4.2.9)可以看出,输入的幅值和频率都会受电机转速影响。
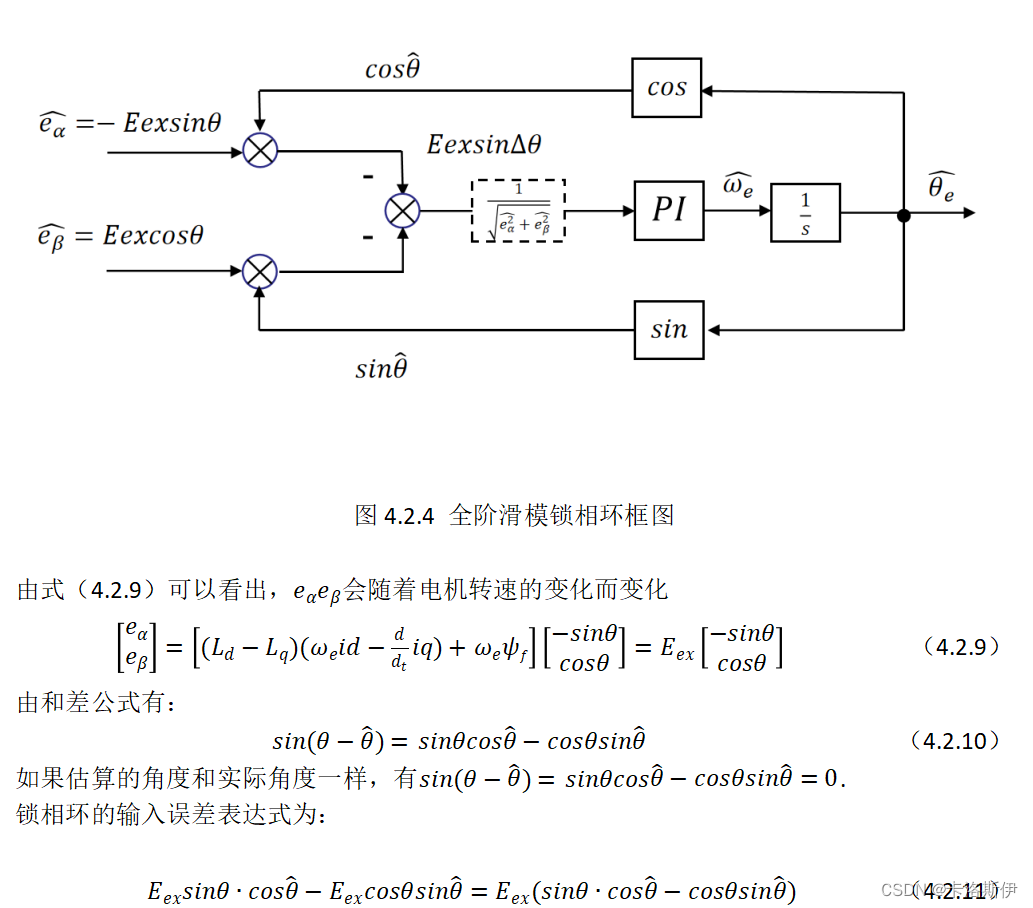
这里定义
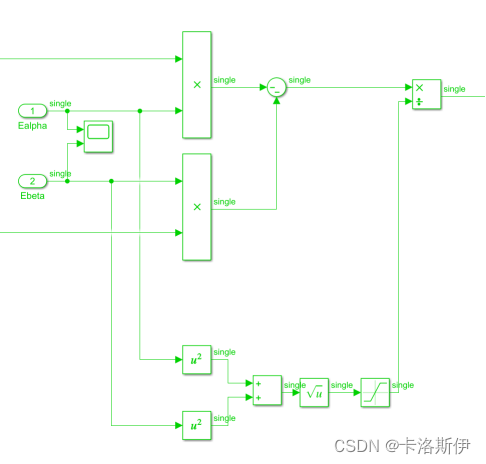
在设计锁相环时,输入误差会随着转速增大而增大,虽然由于PI的调整会不断接近0,但是会影响到观测器的带宽。这里通过归一化的方式,在输入误差阶段去掉量。通过模型实现如下:
参数设计
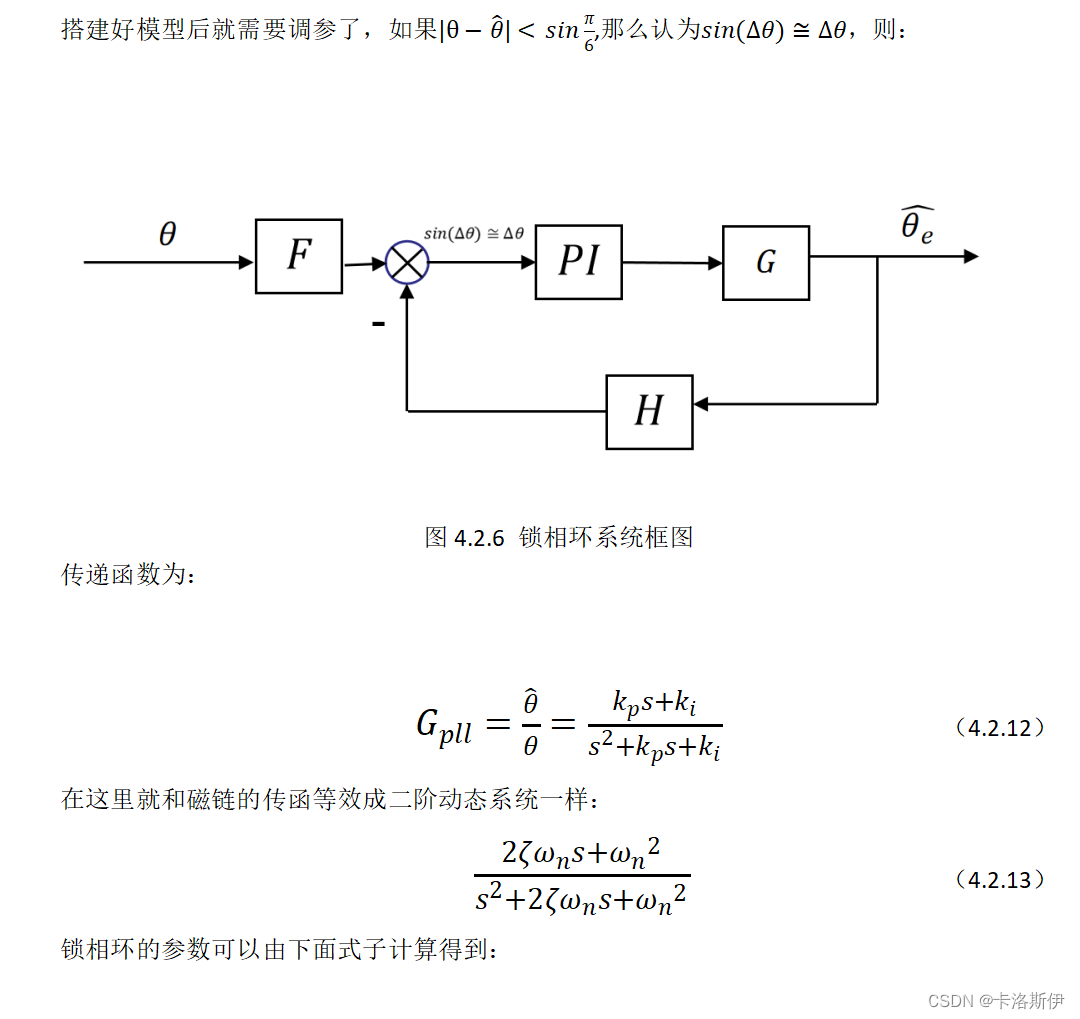

这里需要注意的是观测器的带宽和电机的角速度没有直接关系了,已经被归一化。也可以通过Simulink的环路设计工具设计参数,方法和磁链类似,这里就不再多说。
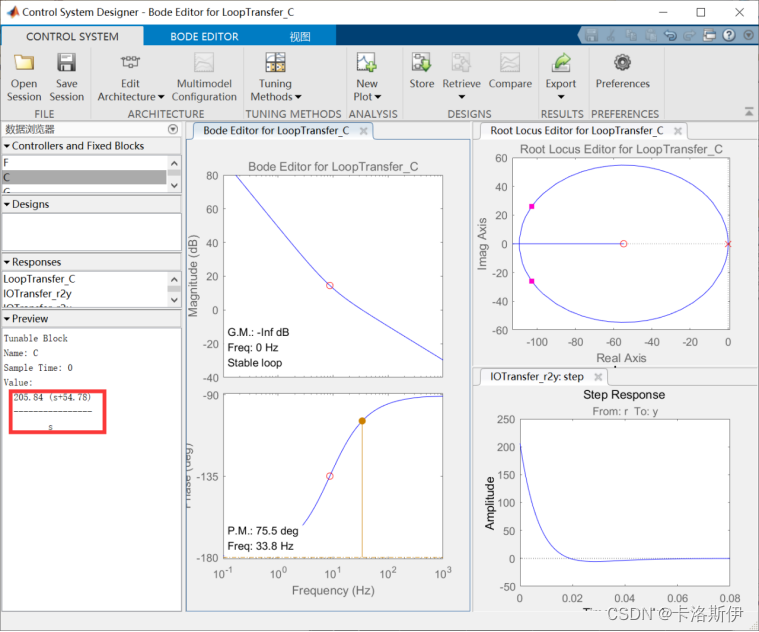
锁相环模型,导入Control System Designer设计的PI参数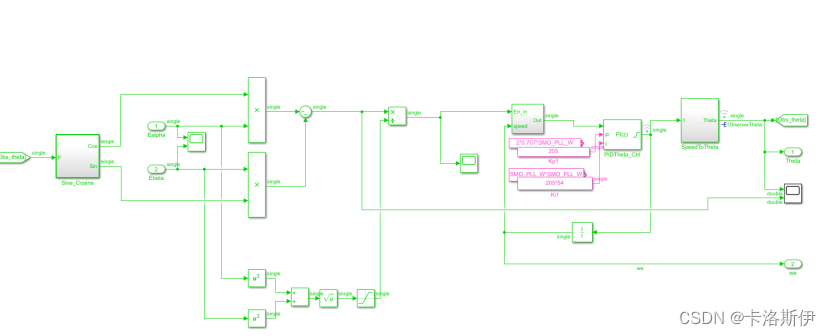
锁相环输出角度和实际角度对比: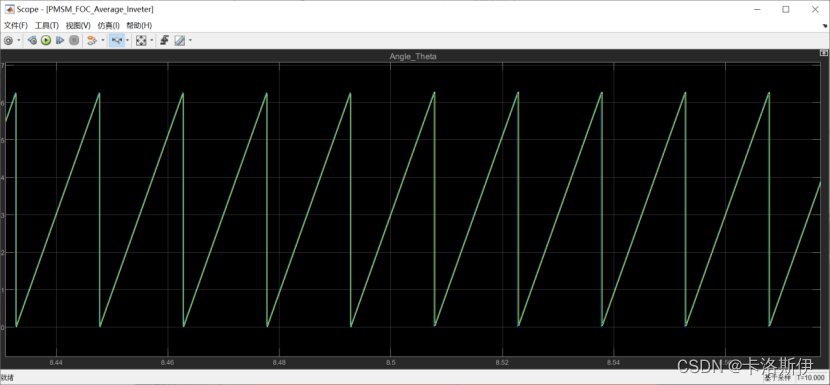
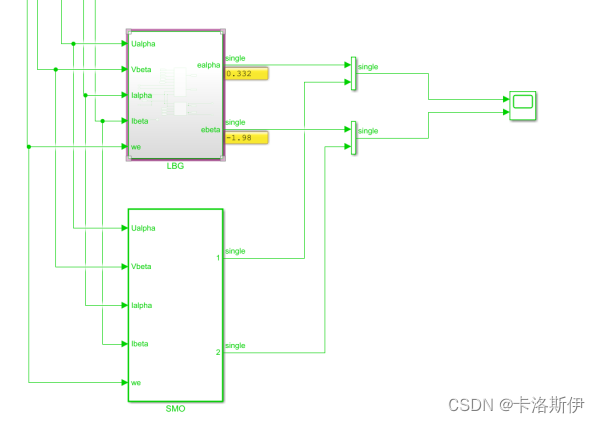
由此,那龙伯格也是基于反电动势的,这种方法也同样适用。如下是龙伯格和滑模的仿反电动势观测效果的对比:
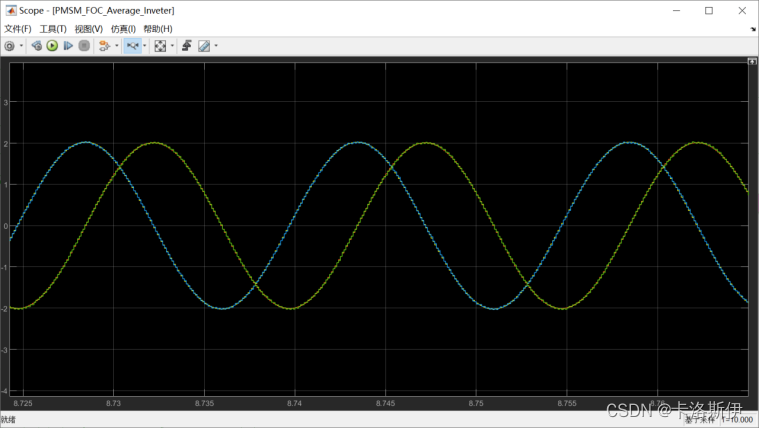
观测到的反电动势已经几乎完全重合在一起了。可以用同个锁相环计算角度和转速。
总结
通过和磁链锁相环相比,全阶滑模设计是有所不同的,不能想当然的直接用,要根据输入信号的特征具体分析。但对于都是基于反电动势的滑模和龙伯格是可以共用同一个锁相环的。
推荐阅读
相关标签

