
- 1springboot/ssm学生请假管理系统 高校请假审批管理系统Java系统
- 2Python基础--集合_set1={1,2,3,4,5},set2={2,3,5,6},则set1 - set2的结果是
- 3int *p[10] 和(*p)[10]程序中体现区别.运行一遍,就都懂了_(*p)【10】在c语言什么意思
- 4小程序关联公众号推送消息(20行代码搞定。公众平台最新版推送接口文档-傻瓜式复制粘贴)_微信公众号小程序代码
- 5Python代码雨_python代码雨代码复制
- 6Eclipse导入Maven项目详解(新手初学)_eclipse导入maven项目can't import project isdms_ui from
- 7素数的时间复杂度分析_分析判断n是否为素数,n≥0 算法的时间复杂度
- 8Unity项目转微信小游戏踩坑记录_unity 转微信小游戏 注意事项
- 9UDP协议是什么?作用是什么?_udp是什么协议
- 10Kafka 入门介绍
图像梯度特征的常用算子:Sobel、Prewitt、Roberts_请根据下图分别写出sobel prewitt roberts 梯度算子的表达式
赞
踩
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
Sobel卷积因子为:
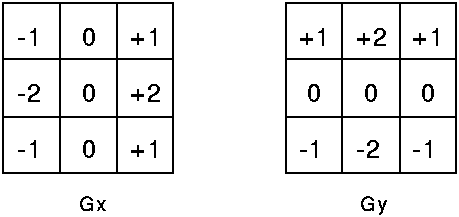
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
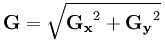
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
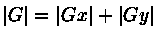
通常,为了提高效率 使用不开平方的近似值:
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
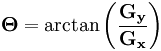
然后可用以下公式计算梯度方向:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
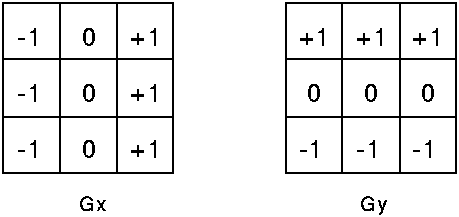
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
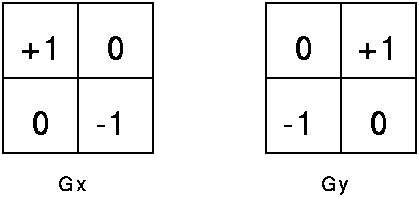
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感。

