
- 1上海亚商投顾:沪指放量反弹 医药、AI概念股集体走强
- 2西电c1级计算机应用测试题型,西电计算机应用基础测试题
- 3八种方法检测是否在模拟器上运行_检测到在模拟器中运行
- 4第1章 机器人概述_球坐标型工业机器人
- 5php登录接口开发文档,登录接口 - 阿里TV开放平台文档 - php中文网手册
- 6用通俗易懂的方式讲解:想搭建企业级的聊天机器人,为什么还需要LlamaIndex?_gptvectorstoreindex
- 7谷歌镜像站分享
- 8docker使用alpine构建jdk21镜像_docker jdk21
- 9PyTorch 笔记(02)— 常用创建 Tensor 方法(torch.Tensor、ones、zeros、eye、arange、linspace、rand、randn、new)_torch.tensor.eye
- 10机器学习Pytorch图片识别_pytorch 图像识别
图论(二)之最短路问题
赞
踩
最短路
Dijkstra求最短路
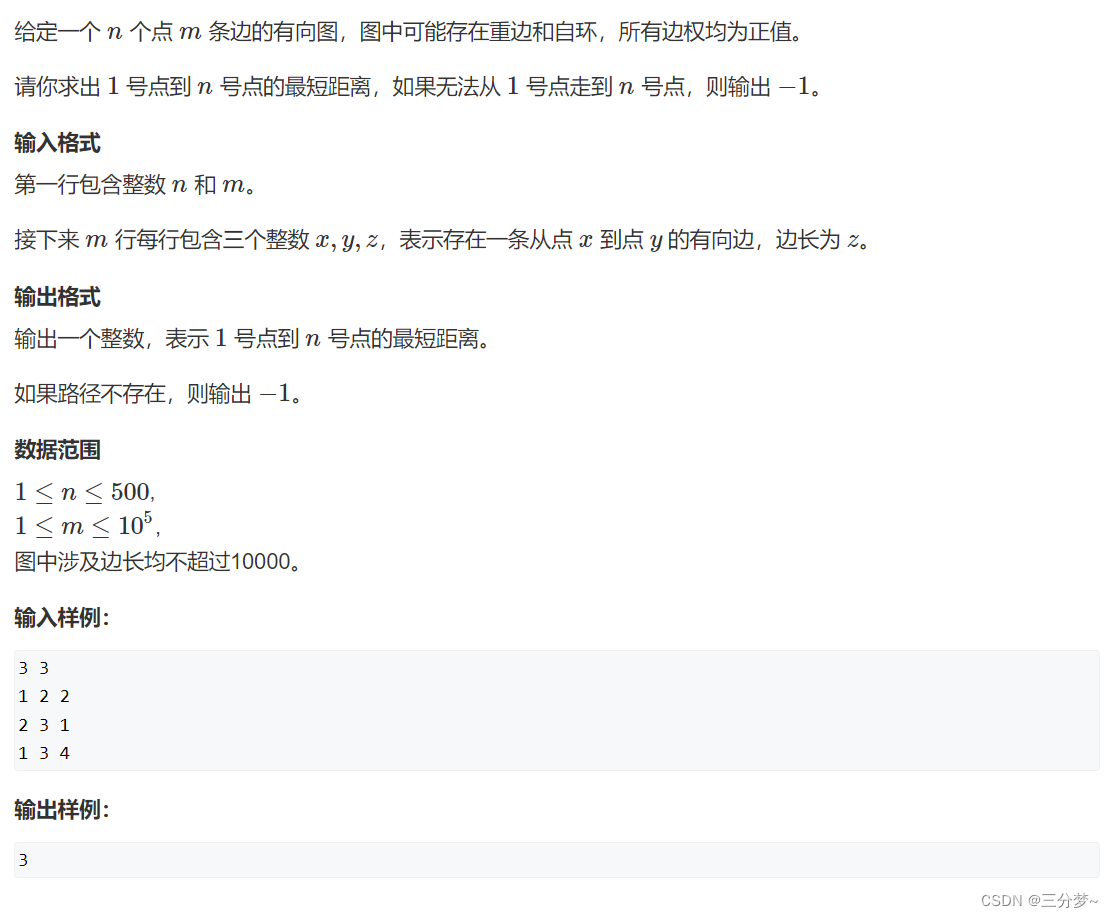
栗题
https://www.acwing.com/problem/content/851/
https://www.acwing.com/problem/content/852/
思想
迪杰斯特拉算法采用的是一种贪心的策略。
求源点到其余各点的最短距离步骤如下:
- 用一个 dist 数组保存源点到其余各个节点的距离,dist[i] 表示源点到节点 i 的距离。初始时,dist 数组的各个元素为无穷大。
用一个状态数组 state 记录是否找到了源点到该节点的最短距离,state[i] 如果为真,则表示找到了源点到节点 i 的最短距离,state[i] 如果为假,则表示源点到节点 i 的最短距离还没有找到。初始时,state 各个元素为假。
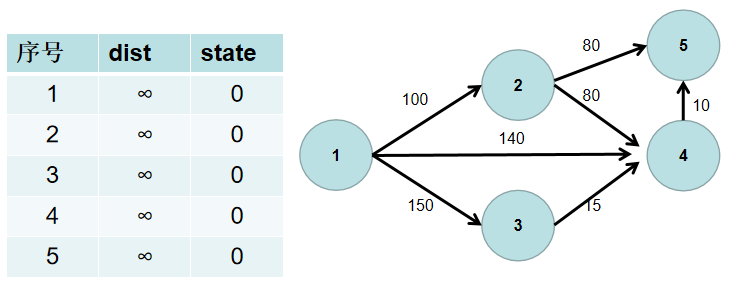
- 源点到源点的距离为 0。即dist[1] = 0。
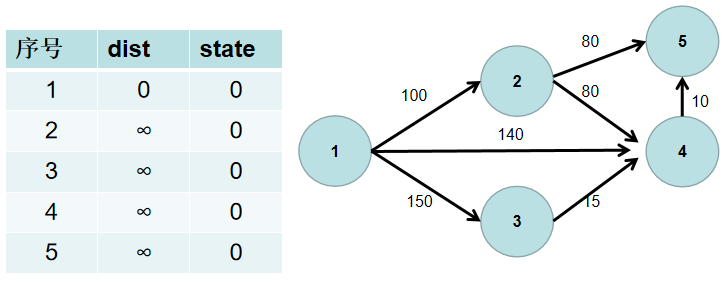
-
遍历 dist 数组,找到一个节点,这个节点是:没有确定最短路径的节点中距离源点最近的点。假设该节点编号为 i。此时就找到了源点到该节点的最短距离,state[i] 置为 1。
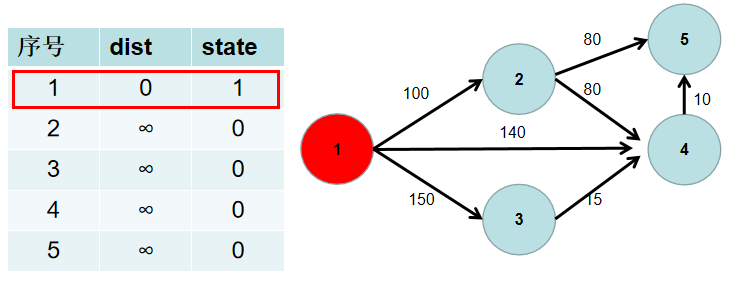
-
遍历 i 所有可以到达的节点 j,如果 dist[j] 大于 dist[i] 加上 i -> j 的距离,即 dist[j] > dist[i] + w[i][j](w[i][j] 为 i -> j 的距离) ,则更新 dist[j] = dist[i] + w[i][j]。
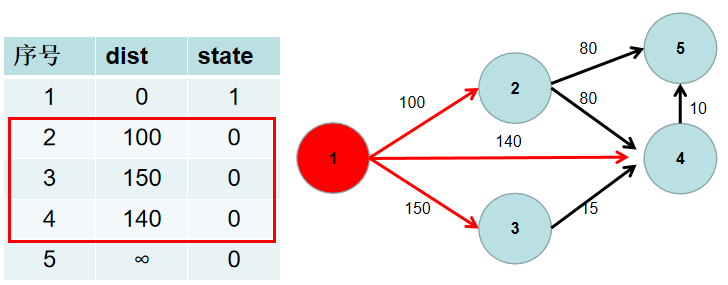
-
重复 3 4 步骤,直到所有节点的状态都被置为 1。

-
此时 dist 数组中,就保存了源点到其余各个节点的最短距离。

题目
代码
#include<iostream> #include <cstring> #include <algorithm> using namespace std; const int N = 510, M = 100010; int h[N], e[M], ne[M], w[M], idx;//邻接表存储图 int state[N];//state 记录是否找到了源点到该节点的最短距离 int dist[N];//dist 数组保存源点到其余各个节点的距离 int n, m;//图的节点个数和边数 void add(int a, int b, int c)//插入边 { e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++; } void Dijkstra() { memset(dist, 0x3f, sizeof(dist));//dist 数组的各个元素为无穷大 dist[1] = 0;//源点到源点的距离为置为 0 for (int i = 0; i < n; i++) { int t = -1; for (int j = 1; j <= n; j++)//遍历 dist 数组,找到没有确定最短路径的节点中距离源点最近的点t { if (!state[j] && (t == -1 || dist[j] < dist[t])) t = j; } state[t] = 1;//state[i] 置为 1。 for (int j = h[t]; j != -1; j = ne[j])//遍历 t 所有可以到达的节点 i { int i = e[j]; dist[i] = min(dist[i], dist[t] + w[j]);//更新 dist[j] } } } int main() { memset(h, -1, sizeof(h));//邻接表初始化 cin >> n >> m; while (m--)//读入 m 条边 { int a, b, w; cin >> a >> b >> w; add(a, b, w); } Dijkstra(); if (dist[n] != 0x3f3f3f3f)//如果dist[n]被更新了,则存在路径 cout << dist[n]; else cout << "-1"; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
优化
下面进行优化,可以看出上方时间复杂度为 O ( n 2 ) O(n^2) O(n2), 查找距离源点最近的点没有被确定的点
t需要 O ( n ) O(n) O(n),遍历t所有可以到达的节点i需要 O ( n ) O(n) O(n), 而这可以进行优化
- 若是用小根堆(优先队列)进行存储, 那么每次找距离最近的那个点
t只需要 O ( 1 ) O(1) O(1),而遍历t所有可以到达的需要 O ( m l o g n ) O(mlog_n) O(mlogn)因为堆的修改需要 O ( l o g n ) O(log_n) O(logn)
代码如下
#include <iostream> #include <cstring> #include <queue> using namespace std; const int N = 150010; //用邻接表的话重边可以不用考虑 typedef pair<int, int> PII; int h[N], w[N], ne[N], idx, e[N]; int n, m; bool st[N]; int dist[N]; void add(int a, int b, int c) { e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++; } int dijkstra() { memset(dist, 0x3f3f3f3f, sizeof dist); dist[1] = 0; priority_queue<PII, vector<PII>, greater<PII>> heap; heap.push({0, 1}); //{距离,编号} while(heap.size()) { auto t = heap.top(); heap.pop(); int no = t.second, distance = t.first; if(st[no]) continue; //若此编号已经找到距离,那么跳过 st[no] = true; for(int i = h[no]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > dist[no] + w[i]) { dist[j] = dist[no] + w[i]; heap.push({dist[j], j}); } } } if(dist[n] == 0x3f3f3f3f) return -1; return dist[n]; } int main() { scanf("%d%d", &n, &m); //邻接表第一步的必备 memset(h, -1, sizeof h); while(m --) { int a, b, c; scanf("%d%d%d", &a, &b, &c); add(a, b, c); } int t = dijkstra(); cout << t; return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
bellman-ford
算法分析
1、问题:为什么Dijkstra不能使用在含负权的图中?
(这是以前错误的分析,若看完这个例子分析觉得正确的说明对最短路理解得还不够透彻,这里不做删除)
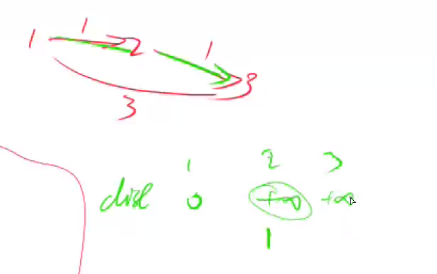
分析:如图所示:
若通过Dijkstra算法可以求出从1号点到达4号点所需的步数为3 (每次选择离源点最短距离的点更新其他点)
但实际上从 1 号点到达 4 号点所需步数为 1 (1 –> 2 –> 3),因此不能使用 Dijkstra 解决含负权图的问题

正确的分析
Dijkstra算法的3个步骤
1、找到当前未标识的且离源点最近的点t
2、对t号点点进行标识
3、用t号点更新其他点的距离
反例

结果:
dijkstra算法在图中走出来的最短路径是1 -> 2 -> 4 -> 5,算出 1 号点到 5 号点的最短距离是2 + 2 + 1 = 5,然而还存在一条路径是1 -> 3 -> 4 -> 5,该路径的长度是5 + (-2) + 1 = 4,因此 dijkstra 算法失效
dijkstra详细步骤
-
初始dist[1] = 0` -
找到了未标识且离源点1最近的结点1,标记1号点,用1号点更新其他所有点的距离,2号点被更新成dist[2] = 2,3号点被更新成
dist[3] = 5
-
找到了未标识且离源点1最近的结点2,标识2号点,用2号点更新其他所有点的距离,4号点被更新成dist[4] = 4
-
找到了未标识且离源点1最近的结点4,标识4号点,用4号点更新其他所有点的距离,5号点被更新成dist[5] = 5
-
找到了未标识且离源点1最近的结点3,标识3号点,用3号点更新其他所有点的距离,4号点被更新成dist[4] = 3
结束 -
得到1号点到5号点的最短距离是5,对应的路径是1 -> 2 -> 4 -> 5,并不是真正的最短距离
2、什么是bellman - ford算法?
Bellman - ford 算法是求含负权图的单源最短路径的一种算法,效率较低,代码难度较小。其原理为连续进行松弛,在每次松弛时把每条边都更新一下,若在 n-1 次松弛后还能更新,则说明图中有负环,因此无法得出结果,否则就完成。
(通俗的来讲就是:假设 1 号点到 n 号点是可达的,每一个点同时向指向的方向出发,更新相邻的点的最短距离,通过循环 n-1 次操作,若图中不存在负环,则 1 号点一定会到达 n 号点,若图中存在负环,则在 n-1 次松弛后一定还会更新)
3、bellman - ford算法的具体步骤
for n次
for 所有边 a,b,w (松弛操作)
dist[b] = min(dist[b],back[a] + w)
- 1
- 2
- 3
注意:back[] 数组是上一次迭代后 dist[] 数组的备份,由于是每个点同时向外出发,因此需要对 dist[] 数组进行备份,若不进行备份会因此发生串联效应,影响到下一个点
为什么需要back[a]数组
为了避免如下的串联情况, 在边数限制为一条的情况下,节点3的距离应该是3,但是由于串联情况,利用本轮更新的节点2更新了节点3的距离,所以现在节点3的距离是2。

正确做法是用上轮节点2更新的距离–无穷大,来更新节点3, 再取最小值,所以节点3离起点的距离是3。
for (int i = 0; i < k; i ++ )
{
memcpy(backup, dist, sizeof dist);
for (int j = 0; j < m ; j ++ )
{
int a = edges[j].a, b = edges[j].b, w = edges[j].w;
dist[b] = min(dist[b], backup[a] + w);
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
4、在下面代码中,是否能到达n号点的判断中需要进行if(dist[n] > INF/2)判断,而并非是if(dist[n] == INF)判断,原因是INF是一个确定的值,并非真正的无穷大,会随着其他数值而受到影响,dist[n]大于某个与INF相同数量级的数即可
5、bellman - ford算法擅长解决有边数限制的最短路问题
时间复杂度 O(nm)
其中n为点数,m为边数
作者:小呆呆
链接:https://www.acwing.com/solution/content/6320/
来源:AcWing
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
只能用bellman-ford来解决的题型
这里题目说了可能为负权边或者负权回路,那么就不能用
dijkstra和spfa算法dijkstra不能解决负权边是因为 dijkstra要求每个点被确定后st[j] = true,dist[j]就是最短距离了,之后就不能再被更新了(一锤子买卖),而如果有负权边的话,那已经确定的点的dist[j]不一定是最短了
题目
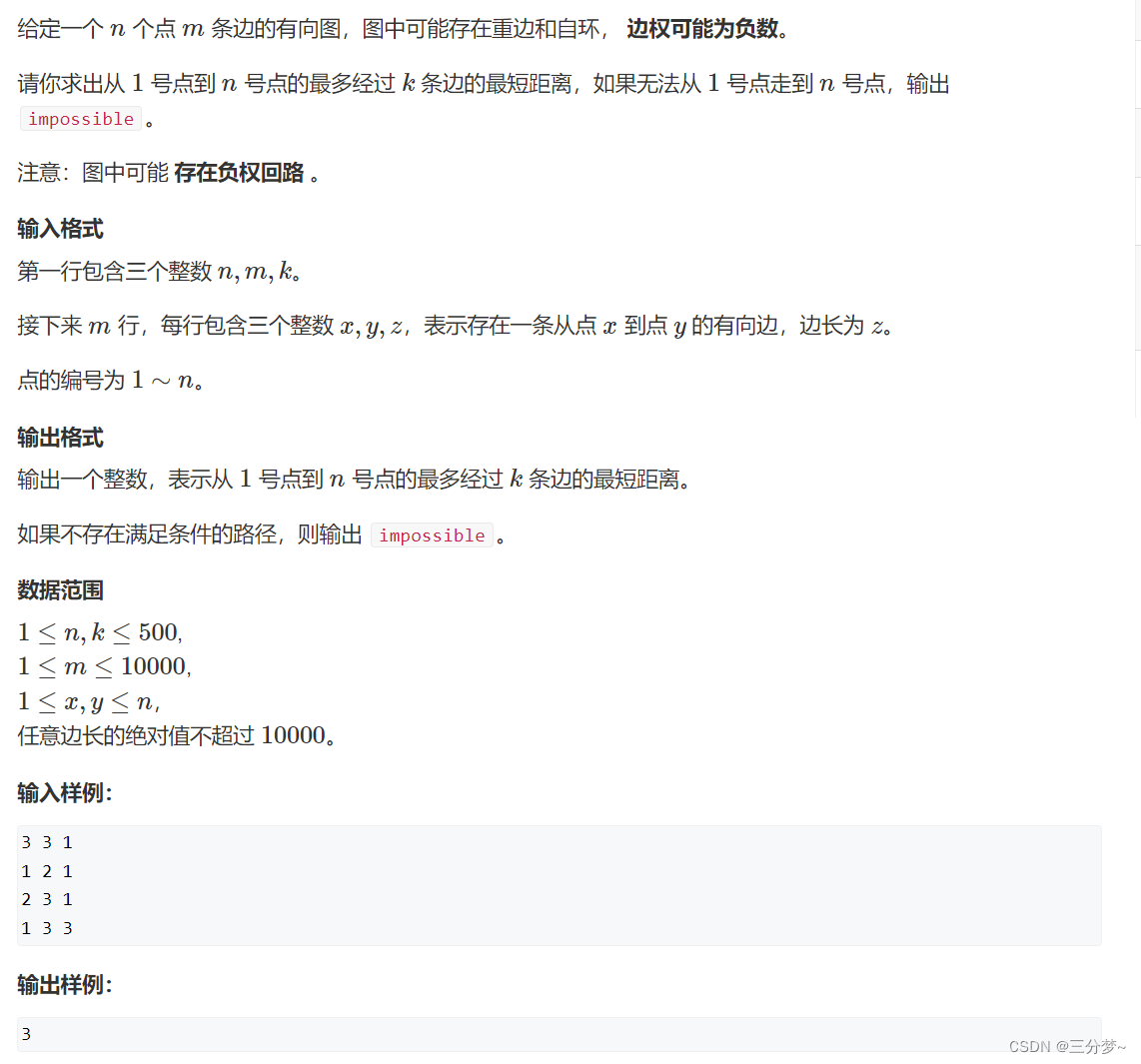
完整代码
```cpp #include <cstring> #include <iostream> #include <algorithm> using namespace std; const int N = 510, M = 10010; struct Edge { int a, b, c; }edges[M]; int n, m, k; int dist[N]; int last[N]; void bellman_ford() { memset(dist, 0x3f, sizeof dist); dist[1] = 0; for (int i = 0; i < k; i ++ ) { memcpy(last, dist, sizeof dist); for (int j = 0; j < m; j ++ ) { auto e = edges[j]; dist[e.b] = min(dist[e.b], last[e.a] + e.c); } } } int main() { scanf("%d%d%d", &n, &m, &k); for (int i = 0; i < m; i ++ ) { int a, b, c; scanf("%d%d%d", &a, &b, &c); edges[i] = {a, b, c}; } bellman_ford(); if (dist[n] > 0x3f3f3f3f / 2) puts("impossible"); else printf("%d\n", dist[n]); return 0; } ```
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
spfa求最短路
spfa 算法思路
明确一下松弛的概念。
-
考虑节点u以及它的邻居v,从起点跑到v有好多跑法,有的跑法经过u,有的不经过。
-
经过u的跑法的距离就是dist[u]+u到v的距离。
-
所谓松弛操作,就是看一看dist[v]和dist[u]+u到v的距离哪个大一点。
-
如果前者大一点,就说明当前的不是最短路,就要赋值为后者,这就叫做松弛。
spfa算法文字说明:
-
一个队列,初始时队列里只有起始点。
-
再建立一个数组记录起始点到所有点的最短路径(该表格的初始值要赋为极大值,该点到他本身的路径赋为0)。
-
再建立一个数组,标记点是否在队列中。
-
队头不断出队,计算始点起点经过队头到其他点的距离是否变短,如果变短且被点不在队列中,则把该点加入到队尾。
-
重复执行直到队列为空。
-
在保存最短路径的数组中,就得到了最短路径。
spfa 图解:
- 给定一个有向图,如下,求A~E的最短路。
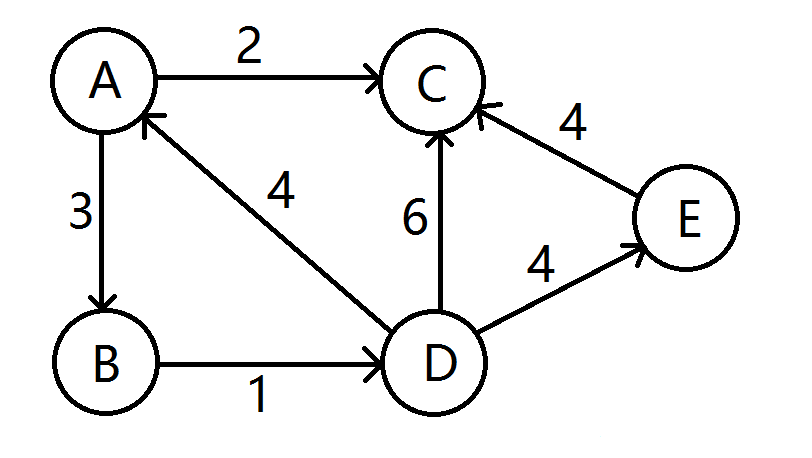
- 源点A首先入队,然后A出队,计算出到BC的距离会变短,更新距离数组,BC没在队列中,BC入队

- B出队,计算出到D的距离变短,更新距离数组,D没在队列中,D入队。然后C出队,无点可更新。
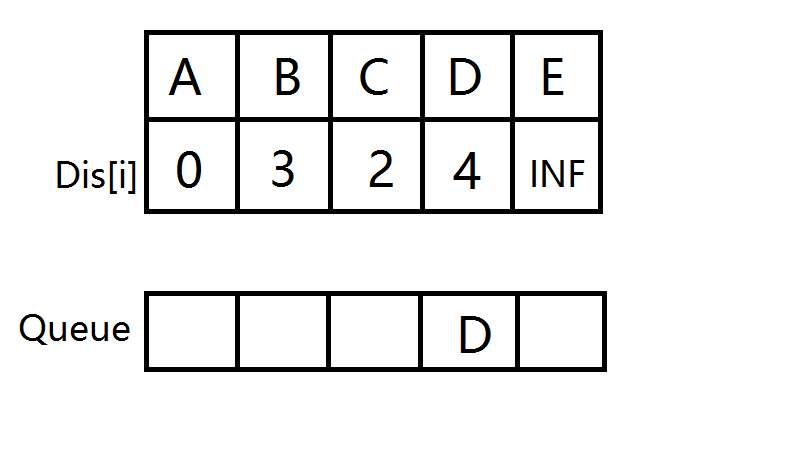
-
D出队,计算出到E的距离变短,更新距离数组,E没在队列中,E入队。
-

-
E出队,此时队列为空,源点到所有点的最短路已被找到,A->E的最短路即为8

题目
https://www.acwing.com/problem/content/853/

完整代码
#include <iostream> #include <cstring> #include <queue> using namespace std; const int N = 100010; int w[N], h[N], idx, ne[N], e[N]; int n, m; int dist[N]; //各点到源点的距离 bool st[N]; void add(int a, int b, int c) { e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++; } int spfa() { memset(dist, 0x3f3f3f3f, sizeof dist); dist[1] = 0; queue<int> q; q.push(1); st[1] = true; //代表在队列中了 while(q.size()) { auto t = q.front(); q.pop(); st[t] = false; for(int i = h[t]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > dist[t] + w[i]) { dist[j] = dist[t] + w[i]; if(!st[j]) { q.push(j); st[j] = true; //在队列中了 } } } } return dist[n]; } int main() { memset(h, -1, sizeof h); cin >> n >> m; while(m --) { int a, b, w; scanf("%d%d%d", &a, &b, &w); add(a, b, w); } int res = spfa(); if(res == 0x3f3f3f3f) cout << "impossible"; else cout << res; return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
总结tips
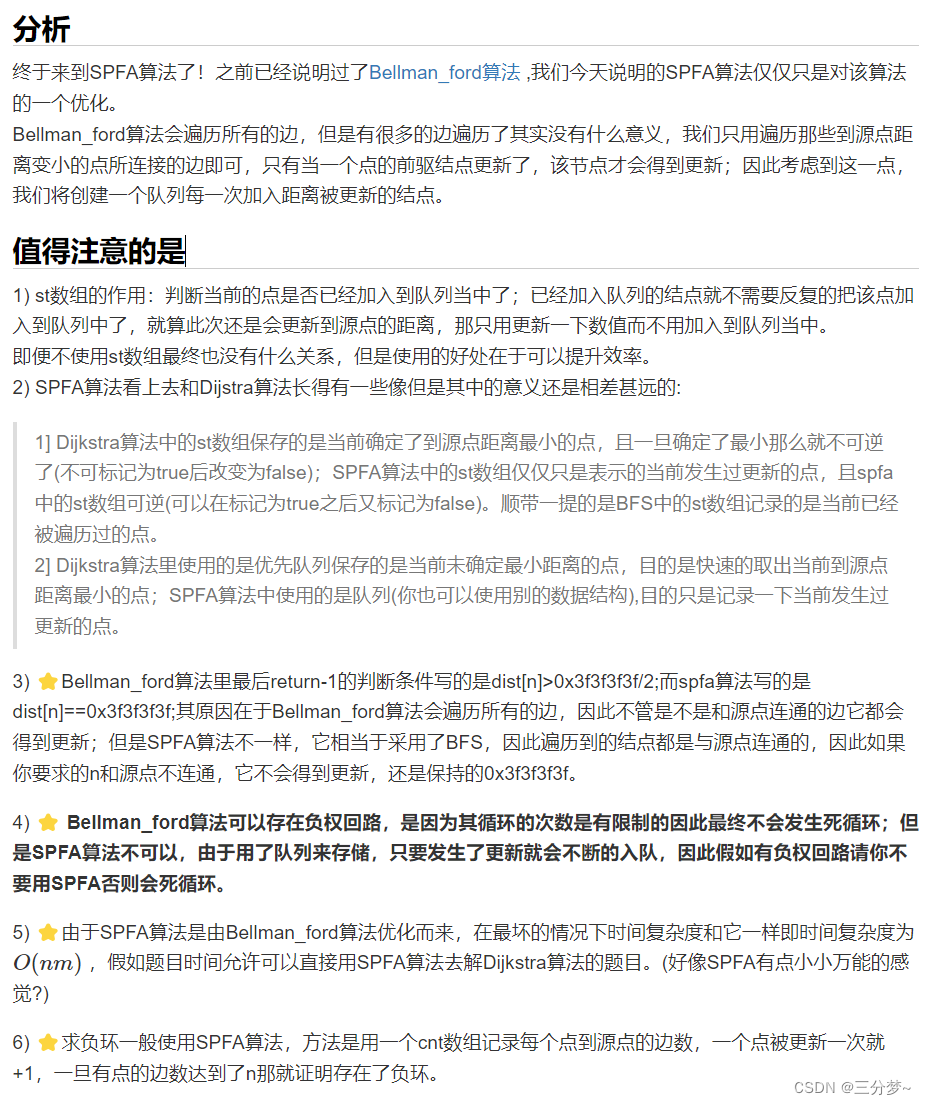
spfa判断负环
https://www.acwing.com/problem/content/854/
算法分析
使用spfa算法解决是否存在负环问题
求负环的常用方法,基于SPFA,一般都用方法 2(该题也是用方法 2):
- 方法 1:统计每个点入队的次数,如果某个点入队
n次,则说明存在负环- - 方法 2:统计当前每个点的最短路中所包含的边数,如果某点的最短路所包含的边数大于等于
n,则也说明存在环
-
dist[x]记录虚拟源点到x的最短距离 -
cnt[x]记录当前x点到虚拟源点最短路的边数,初始每个点到虚拟源点的距离为0,只要他能再走n步,即cnt[x] >= n,则表示该图中一定存在负环,由于从虚拟源点到x至少经过n条边时,则说明图中至少有n + 1个点,表示一定有点是重复使用 -
若
dist[j] > dist[t] + w[i],则表示从t点走到j点能够让权值变少,因此进行对该点j进行更新,并且对应cnt[j] = cnt[t] + 1,往前走一步
注意:该题是判断是否存在负环,并非判断是否存在从1开始的负环,因此需要将所有的点都加入队列中,更新周围的点
故只需要对上方代码稍做改动即可:
代码如下
#include <iostream> #include <cstring> #include <queue> using namespace std; const int N = 100010; int w[N], h[N], idx, ne[N], e[N]; int n, m; int dist[N]; //各点到源点的距离 int cnt[N]; //存储边的个数 bool st[N]; void add(int a, int b, int c) { e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx++; } int spfa() { memset(dist, 0x3f3f3f3f, sizeof dist); dist[1] = 0; queue<int> q; for(int i = 1; i <= n; i++) { st[i] = true; q.push(i); } while(q.size()) { auto t = q.front(); q.pop(); st[t] = false; for(int i = h[t]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > dist[t] + w[i]) { dist[j] = dist[t] + w[i]; cnt[j] = cnt[t] + 1; if(cnt[j] > n) return true; if(!st[j]) { q.push(j); st[j] = true; //在队列中了 } } } } return false; } int main() { memset(h, -1, sizeof h); cin >> n >> m; while(m --) { int a, b, w; scanf("%d%d%d", &a, &b, &w); add(a, b, w); } bool res = spfa(); if(res) cout << "Yes"; else cout << "No"; return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
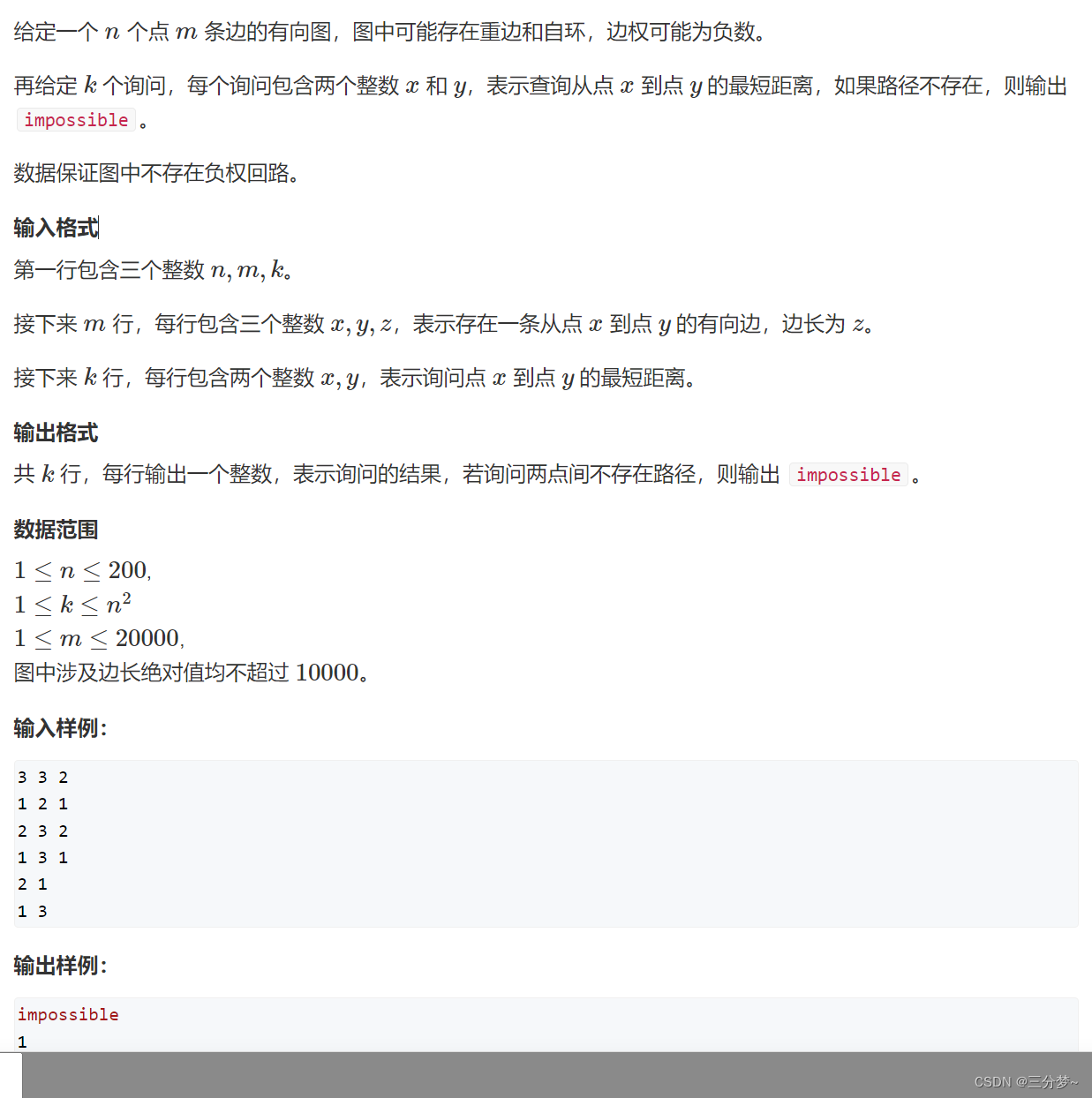
Floyd求最短路
求多源最短路
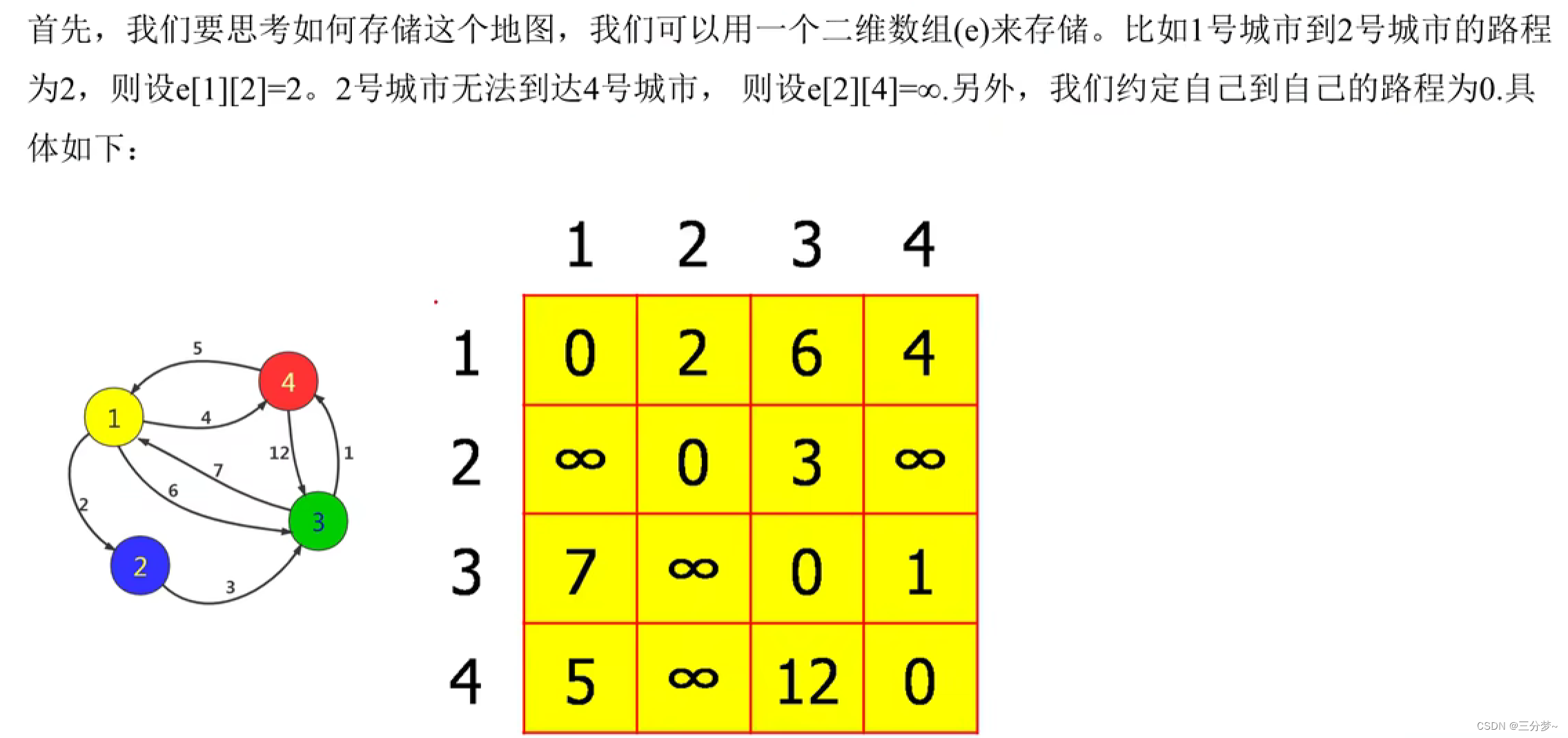
通过中转和动态规划来递推出最短路径距离
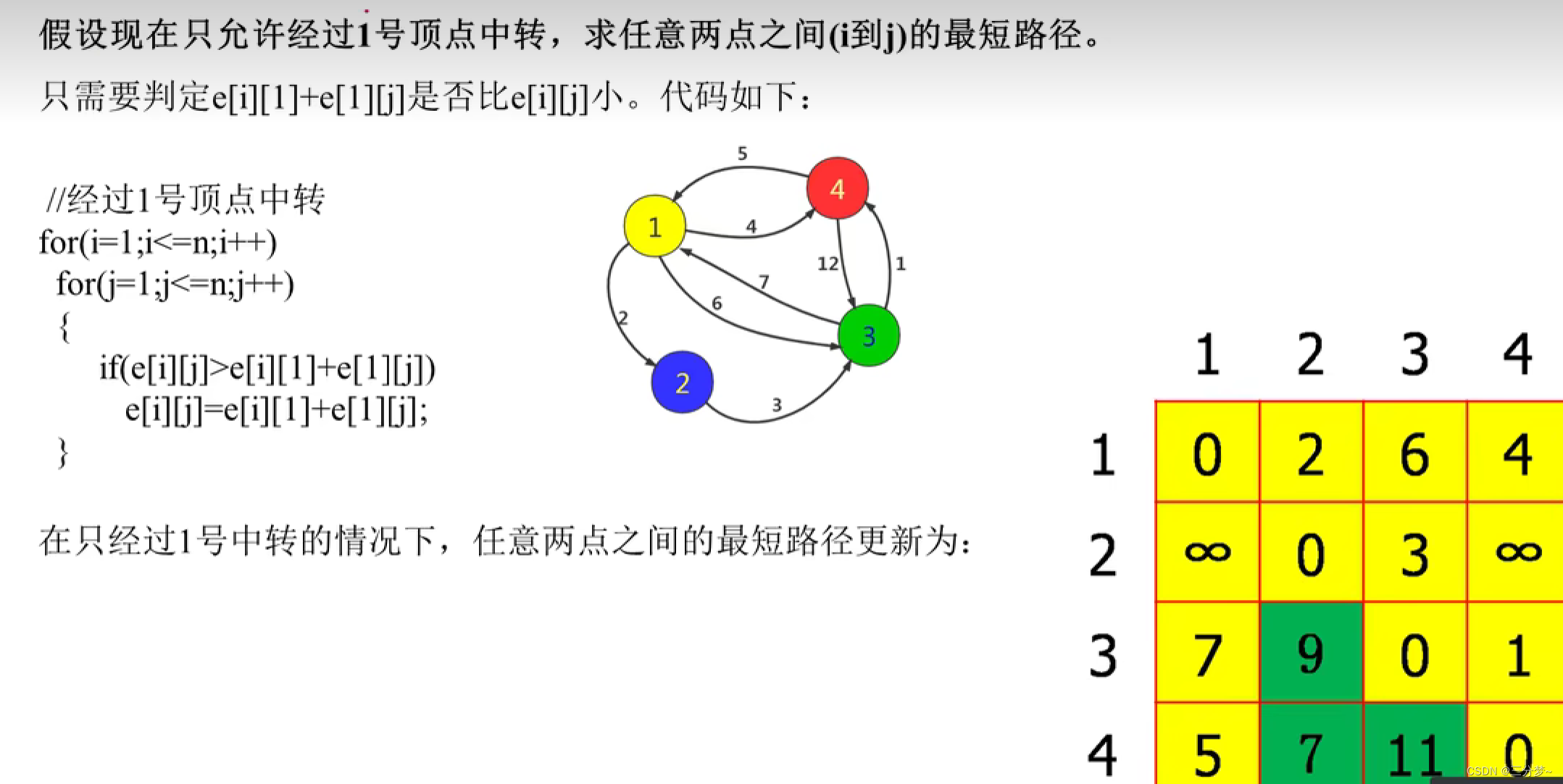
从i到j经过k,通过三重循环来实现
初始化自环为0,其他为INF
对于重边的情况下,我们初始化取最小距离
模拟过程
链接:https://www.acwing.com/problem/content/856/
题目
代码如下
using namespace std; const int N = 210, INF = 1e9; int n, m, Q; int d[N][N]; void floyd() { for(int k = 1; k <= n; k++) //依次经过1~n中的n各点进行中转 for(int i = 1; i <= n; i++) for(int j = 1; j <= n; j++) d[i][j] = min(d[i][j], d[i][k] + d[k][j]); } int main() { cin >> n >> m >> Q; //初始化处理重边和自环 for(int i = 1; i <= n; i++) for(int j = 1; j <= n; j++) if(i == j) d[i][j] = 0; else d[i][j] = INF; while(m --) { int x, y, z; scanf("%d%d%d", &x, &y, &z); d[x][y] = min(d[x][y], z); } floyd(); while(Q --) { int a, b; scanf("%d%d", &a, &b); int res = d[a][b]; if(res > INF / 2) printf("impossible\n"); else cout << res << '\n'; } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34

