
热门标签
热门文章
- 1运算放大器(运放)选型、参数分析以及应用OPA2350
- 2java 服务证书问题-生成jssecacerts CA证书
- 3相对全面的四足机器人驱动规划MATLAB和Simulink实现方式(足端摆线规划,Hopf-CPG,Kimura-CPG)_如何在simulink中获取足端轨迹
- 4Java -枚举的使用_java枚举的使用
- 5推荐系统笔记(一)_推荐系统技术架构
- 6使用XGBoost进行时间序列预测流程代码_xgboost 时间序列
- 7AWS-EKS 给其他IAM赋予集群管理权限
- 8Flink_CDC搭建及简单使用_flink cdc部署
- 9建议收藏!30套经典互联网思维研究模型_优化引导模型
- 10大数据分析-第八章 推荐系统_spricoder的博客
当前位置: article > 正文
斯坦福机器狗的设计与实现 (四足机器人的电路和控制思路)_四足狗电源供电保护电路
作者:我家小花儿 | 2024-03-25 10:39:58
赞
踩
四足狗电源供电保护电路
四足机器人的电路和控制思路
线路连接

步骤:
- 连接开关,电池部分。
- 将LM2596调压模块调至6V稳压输出
- 按照电路图连接剩余线路
- 测试环节

实际操作:
电池和电源模块。

接头接到开关上。
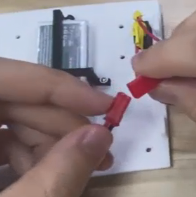
打开开关以后形态:

连接上以后打开开关注意模块后的两条线不能碰到一起,否则会短路。
用万用表,将旋钮调到20V,将黑色的放到模块的负极上,将红色的放到正极上。
读表。电压不对时,要调成6V
调金色的小头:

调节完成之后,关闭电源,防止短路。
- 接舵机扩展版:

将线接入两个螺丝的地方,JND(负极)
接完形态:

- 接PyBOARD主控
PyBOARD主控实物图:
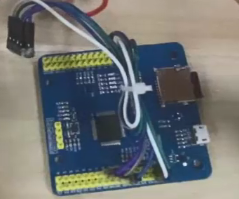
将线连接到黄色的对应的号码上

将线与舵机扩展版连接。

将零件用螺丝固定到白色的板子上:

按下标示的那个按钮可以看到标示的地方会闪烁一下,标示连接正常。

- 接舵机

首先确定头部:(usb接口前就是)
接腿1:(上面确定好的4号,5号)找准位置。

以此类推,其余腿连接方法一样。
接好线后用轧带,把线都轧到一起。
控制电路思想:
硬件设计思路:

软件设计思路:

如需查看视频教程:
http://online.edu.senlanit.com/playback/playback?cid=a0844796-d979-4dd9-9f63-a44f505793df&vid=cae40e0c-db19-451b-8e0b-d55b2684aa1f&v=1111111111
进去以后搜索:斯坦福机器狗的设计与实现(黄老师)的第三课。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/309062?site
推荐阅读
- 废话不多说直接上代码。HTML 代码 -->
赞
踩
相关标签

