
- 1华为官方推荐:学习鸿蒙开发高分好书,这6本能帮你很多!_鸿蒙开发 推荐 书籍
- 2ELF文件中得section(.data .bss .text .altinstr_replacement、.altinstr_aux)_.section .datar, data
- 3ssm的maven坐标_ssm maven 坐标
- 4MySQL存储引擎详解(一)-InnoDB架构_mysql引擎innodb
- 5(一)使用AI、CodeFun开发个人名片微信小程序_ai生成小程序代码
- 6求助:R包安装失败_cannot open compressed file description
- 74款超好用的AI换脸软件,一键视频直播换脸(附下载链接)
- 8【深度学习】激活函数(sigmoid、ReLU、tanh)_sigmoid激活函数
- 9操作系统的程序内存结构 —— data和bss为什么需要分开,各自的作用_为什么分bss和data
- 10记一次 Docker Nginx 自定义 log_format 报错的解决方案_log_format" directive no dyconf_version config in
MMDetection 3D入门_mmdetection3d的dev什么意思
赞
踩
MMDetection 3D入门

介绍
最大的感受就是 MMDetection 3D 太强大了。一个强大的框架,融合了多种模型和训练方法,使用起来也很方便。
MMEngine 是一个基于 PyTorch 实现的,用于训练深度学习模型的基础库,支持在 Linux、Windows、macOS 上运行。它具有如下三个特性:
- 通用且强大的执行器:
- 支持用少量代码训练不同的任务,例如仅使用 80 行代码就可以训练 ImageNet(原始 PyTorch 示例需要 400 行)。
- 轻松兼容流行的算法库(如 TIMM、TorchVision 和 Detectron2)中的模型。
- 接口统一的开放架构:
- 使用统一的接口处理不同的算法任务,例如,实现一个方法并应用于所有的兼容性模型。
- 上下游的对接更加统一便捷,在为上层算法库提供统一抽象的同时,支持多种后端设备。目前 MMEngine 支持 Nvidia CUDA、Mac MPS、AMD、MLU 等设备进行模型训练。
- 可定制的训练流程:
- 定义了“乐高”式的训练流程。
- 提供了丰富的组件和策略。
- 使用不同等级的 API 控制训练过程。
架构
MEngine 在 OpenMMLab 2.0 中的层次。MMEngine 实现了 OpenMMLab 算法库的新一代训练架构,为 OpenMMLab 中的 30 多个算法库提供了统一的执行基座。其核心组件包含训练引擎、评测引擎和模块管理等。

模块
MMEngine 将训练过程中涉及的组件和它们的关系进行了抽象,如上图所示。不同算法库中的同类型组件具有相同的接口定义。
核心模块与相关组件
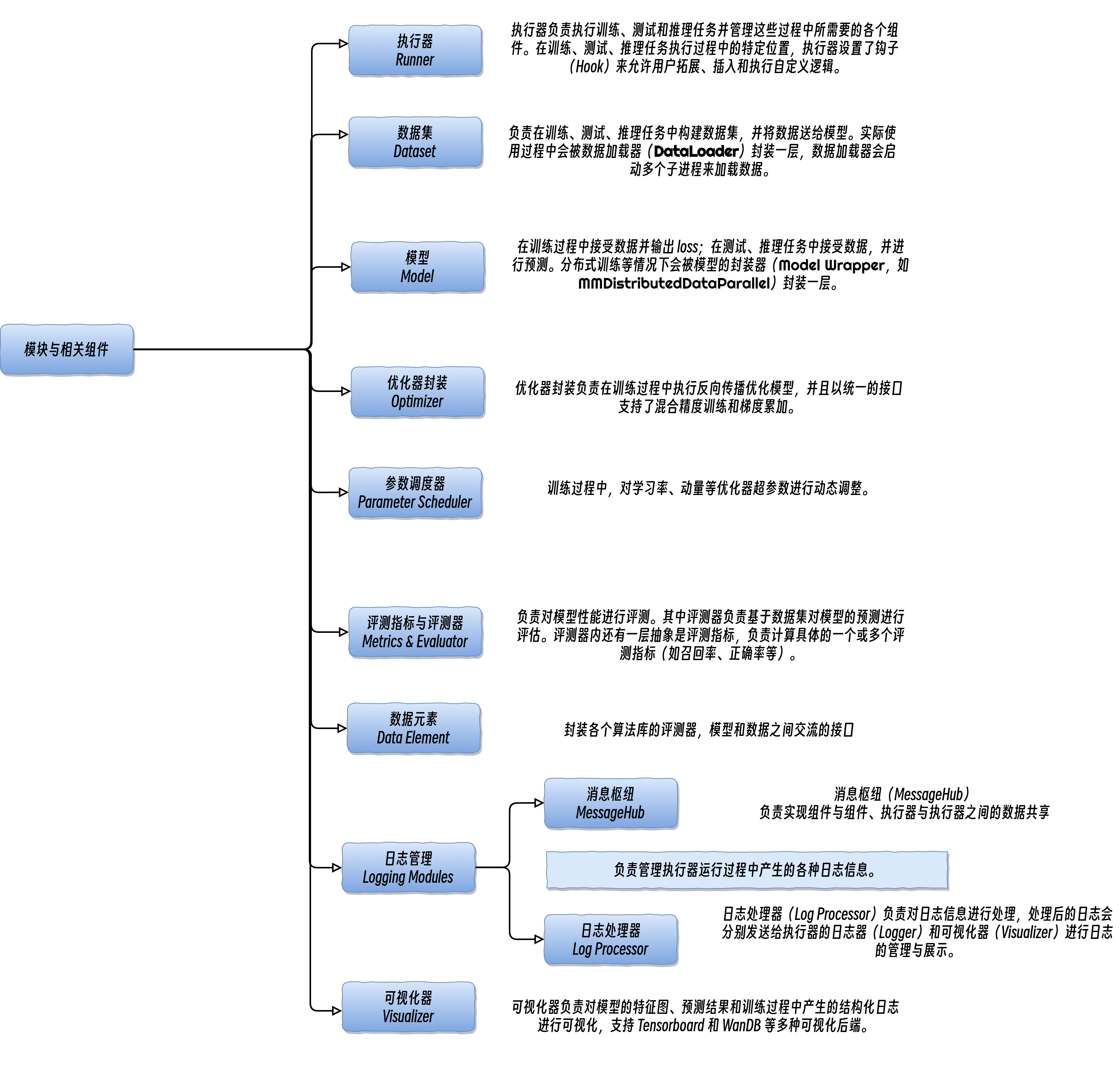
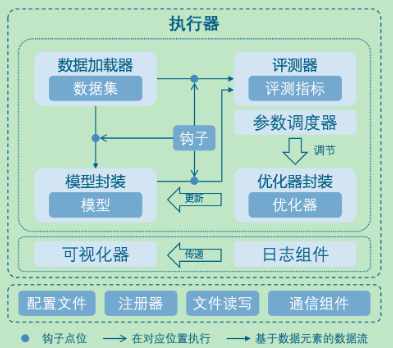
训练引擎的核心模块是执行器(Runner)。执行器负责执行训练、测试和推理任务并管理这些过程中所需要的各个组件。在训练、测试、推理任务执行过程中的特定位置,执行器设置了钩子(Hook)来允许用户拓展、插入和执行自定义逻辑。执行器主要调用如下组件来完成训练和推理过程中的循环:
- 数据集(Dataset):负责在训练、测试、推理任务中构建数据集,并将数据送给模型。实际使用过程中会被数据加载器(DataLoader)封装一层,数据加载器会启动多个子进程来加载数据。
- 模型(Model):在训练过程中接受数据并输出 loss;在测试、推理任务中接受数据,并进行预测。分布式训练等情况下会被模型的封装器(Model Wrapper,如
MMDistributedDataParallel)封装一层。 - 优化器封装(Optimizer):优化器封装负责在训练过程中执行反向传播优化模型,并且以统一的接口支持了混合精度训练和梯度累加。
- 参数调度器(Parameter Scheduler):训练过程中,对学习率、动量等优化器超参数进行动态调整。
公共基础模块
MMEngine 中还实现了各种算法模型执行过程中需要用到的公共基础模块,包括
- 配置类(Config):在 OpenMMLab 算法库中,用户可以通过编写 config 来配置训练、测试过程以及相关的组件。
- 注册器(Registry):负责管理算法库中具有相同功能的模块。MMEngine 根据对算法库模块的抽象,定义了一套根注册器,算法库中的注册器可以继承自这套根注册器,实现模块的跨算法库调用。
- 文件读写(File I/O):为各个模块的文件读写提供了统一的接口,以统一的形式支持了多种文件读写后端和多种文件格式,并具备扩展性。
- 分布式通信原语(Distributed Communication Primitives):负责在程序分布式运行过程中不同进程间的通信。这套接口屏蔽了分布式和非分布式环境的区别,同时也自动处理了数据的设备和通信后端。
- 其他工具(Utils):还有一些工具性的模块,如 ManagerMixin,它实现了一种全局变量的创建和获取方式,执行器内很多全局可见对象的基类就是 ManagerMixin。
依赖
MMDetection3D 可以安装在 Linux, MacOS, (实验性支持 Windows) 的平台上,它具体需要下列安装包:
- Python 3.6+
- PyTorch 1.3+
- CUDA 9.2+ (如果你从源码编译 PyTorch, CUDA 9.0 也是兼容的。)
- GCC 5+
- MMCV
安装
最佳实践
步骤 0. 使用 MIM 安装 MMEngine,MMCV 和 MMDetection。
pip install -U openmim
mim install mmengine
mim install 'mmcv>=2.0.0rc4'
mim install 'mmdet>=3.0.0'
- 1
- 2
- 3
- 4
注意:在 MMCV-v2.x 中,mmcv-full 改名为 mmcv,如果您想安装不包含 CUDA 算子的 mmcv,您可以使用 mim install "mmcv-lite>=2.0.0rc4" 安装精简版。
步骤 1. 安装 MMDetection3D。
方案 a:如果您开发并直接运行 mmdet3d,从源码安装它:
git clone https://github.com/open-mmlab/mmdetection3d.git -b dev-1.x
# "-b dev-1.x" 表示切换到 `dev-1.x` 分支。
cd mmdetection3d
pip install -v -e .
# "-v" 指详细说明,或更多的输出
# "-e" 表示在可编辑模式下安装项目,因此对代码所做的任何本地修改都会生效,从而无需重新安装。
- 1
- 2
- 3
- 4
- 5
- 6
方案 b:如果您将 mmdet3d 作为依赖或第三方 Python 包使用,使用 MIM 安装:
mim install "mmdet3d>=1.1.0rc0"
- 1
验证安装
为了验证 MMDetection3D 是否安装正确,我们提供了一些示例代码来执行模型推理。
步骤 1. 我们需要下载配置文件和模型权重文件。
mim download mmdet3d --config pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car --dest .
- 1
下载将需要几秒钟或更长时间,这取决于您的网络环境。完成后,您会在当前文件夹中发现两个文件 pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car.py 和 hv_pointpillars_secfpn_6x8_160e_kitti-3d-car_20220331_134606-d42d15ed.pth。
步骤 2. 推理验证。
方案 a:如果您从源码安装 MMDetection3D,那么直接运行以下命令进行验证:
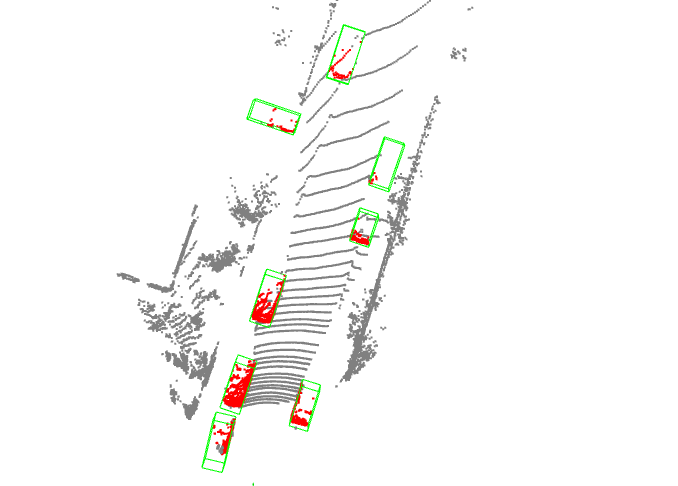
python demo/pcd_demo.py demo/data/kitti/000008.bin pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car.py hv_pointpillars_secfpn_6x8_160e_kitti-3d-car_20220331_134606-d42d15ed.pth --show
- 1
您会看到一个带有点云的可视化界面,其中包含有在汽车上绘制的检测框。
步骤 3. 导入头文件验证
(mmdetection3d_randy) qiancj@qiancj-HP-ZBook-G8:~/codes/download/mmdetection3d$ python
Python 3.8.16 (default, Mar 2 2023, 03:21:46)
[GCC 11.2.0] :: Anaconda, Inc. on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import mmdet3d
>>> print(mmdet3d.__version__)
1.1.0
>>> quit()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
测试数据
.
├── 1212_pkl
│ ├── infos_test_rela.pkl
│ └── infos_val_rela.pkl
├── data
└── test
├── 1619514624.158707857.bin
├── 1619514665.967276335.bin
├── 1619515577.366736174.bin
├── 1619515927.231983900.bin
├── 1619516334.708499432.bin
└── 1636101084.089.bin
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
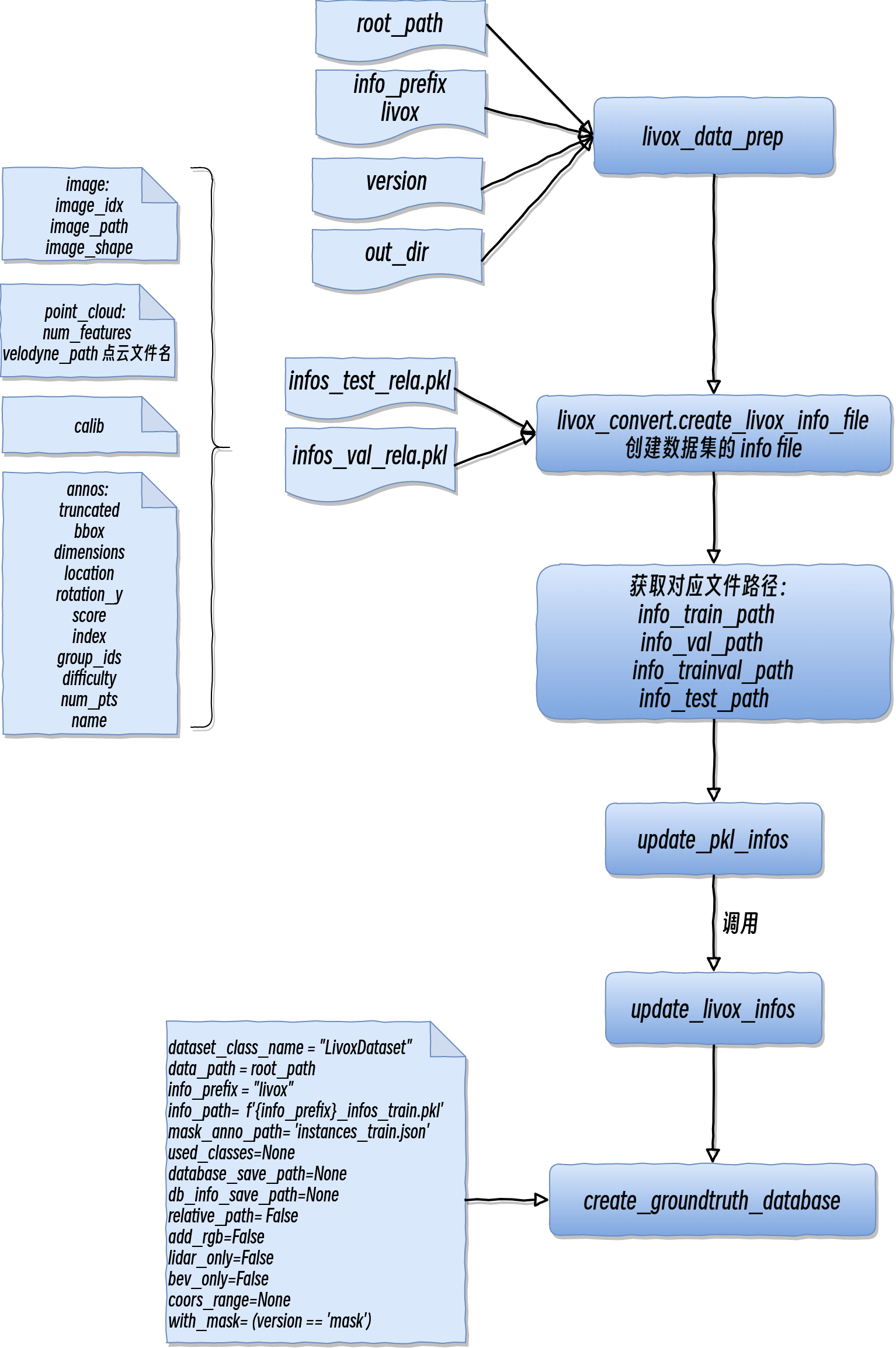
create_data.py
将已有的数据,整合成训练所需要的数据格式
命令行参数
python /home/qiancj/codes/mmdet3d_lidar/tools/create_data.py livox --root-path /home/qiancj/Documents/data/centerpoint_demo_data/l3_data/data --out-dir /home/qiancj/Documents/data/centerpoint_demo_data/l3_data/data --extra-tag livox
- 1
参数:livox --root-path /home/qiancj/Documents/data/centerpoint_demo_data/l3_data/data --out-dir /home/qiancj/Documents/data/centerpoint_demo_data/l3_data/data --extra-tag livox
def livox_data_prep(root_path, info_prefix, version, out_dir)
| 入参 | 含义 |
|---|---|
| root_path (str) | Path of dataset root |
| info_prefix (str) | The prefix of info filenames |
| version (str) | Dataset version |
| out_dir (str) | Output directory of the groundtruth database info |
| with_plane (bool, optional) | Whether to use plane information,Default: False |
修改数据目录
codes/mmdet3d_20220512/mmdetection3d/tools/dataset_converters/fawlidar_converter.py
文件中修改:
pkl_root = "/home/qiancj/Documents/data/centerpoint_demo_data/l3_data/1212_pkl"
train_anno = os.path.join(pkl_root, "infos_test_rela.pkl")
val_anno = os.path.join(pkl_root, "infos_val_rela.pkl")
pkl_root = "/home/carolliu/data/M1_data/train/new/"
train_anno = os.path.join(pkl_root, "infos_train_100t.pkl")
val_anno = os.path.join(pkl_root, "infos_train_100t.pkl")
// 生成test pkl
filename = save_path / f'{pkl_prefix}_infos_test.pkl'
print(f'FAWLiDAR info test file is saved to {filename}')
mmengine.dump(fawlidar_infos_test, filename)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
生成文件:
fawlidar_infos_test.pkl
fawlidar_infos_train.pkl
fawlidar_infos_trainval.pkl
fawlidar_infos_val.pkl
- 1
- 2
- 3
- 4
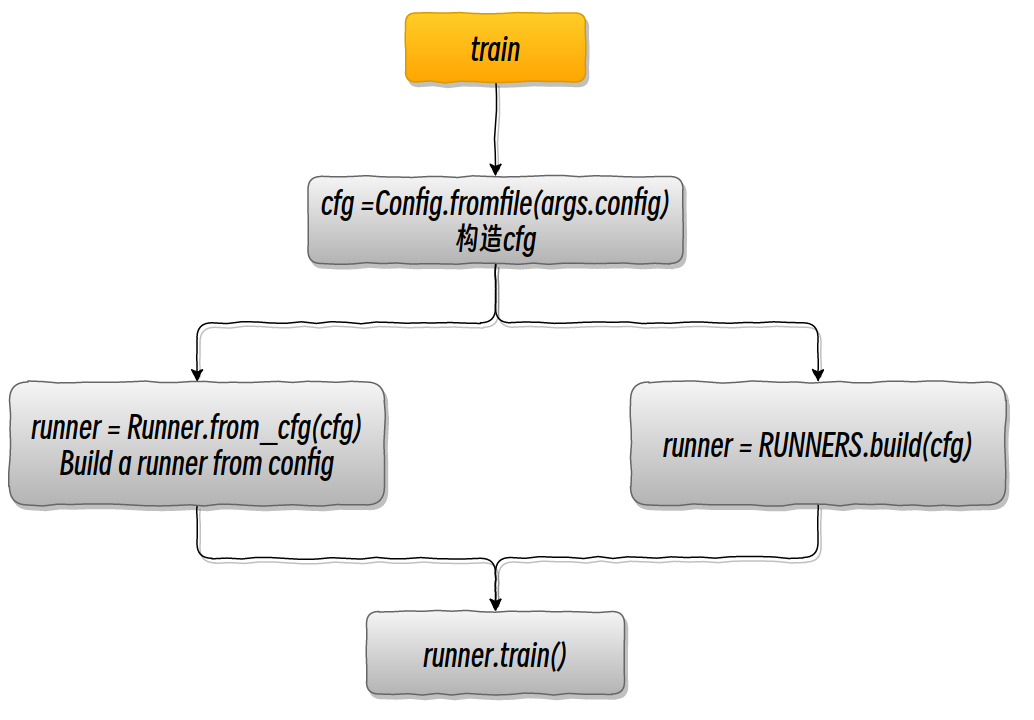
train.py
整体流程
命令行参数
python /home/qiancj/codes/mmdet3d_lidar/tools/train.py /home/qiancj/codes/mmdet3d_lidar/configs/centerpoint/centerpoint_pillar02_second_secfpn_8xb4-cyclic-20e_livox.py
- 1
参数:/home/qiancj/codes/mmdet3d_lidar/configs/centerpoint/centerpoint_pillar02_second_secfpn_8xb4-cyclic-20e_livox.py
配置文件中为什么传入参数是 dict
在MMEngine 中提供了两种不同风格的执行器构建方式:
-
基于手动构建的
-
基于注册机制的。
请看下面的例子:
from mmengine.model import BaseModel from mmengine.runner import Runner from mmengine.registry import MODELS # 模型根注册器,你的自定义模型需要注册到这个根注册器中 @MODELS.register_module() # 用于注册的装饰器 class MyAwesomeModel(BaseModel): # 你的自定义模型 def __init__(self, layers=18, activation='silu'): ... # 基于注册机制的例子 runner = Runner( model=dict( type='MyAwesomeModel', layers=50, activation='relu'), ... ) # 基于手动构建的例子 model = MyAwesomeModel(layers=18, activation='relu') runner = Runner( model=model, ... )

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
两种写法基本是等价的,区别在于:前者以 dict 作为输入时,该模块会在需要时在执行器内部被构建;而后者是构建完成后传递给执行器。
核心思想是:注册器维护着模块的构建方式和它的名字之间的映射。
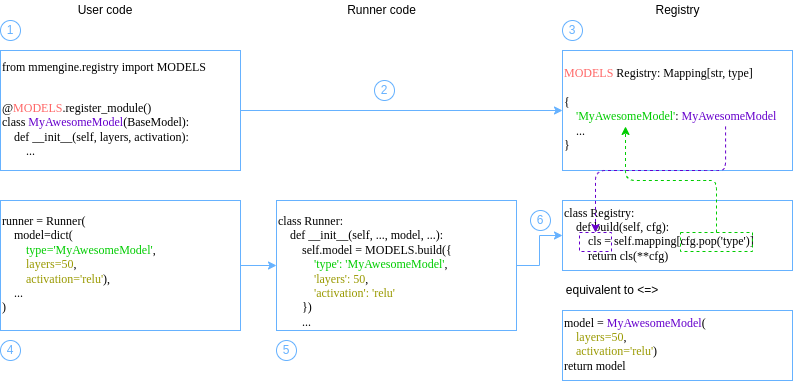
所以,当同一种方法有多种实现方式时,通过配置文件,就可以轻易在代码中选用不同实现代码,只需修改配置文件即可,而不用修改源代码。
Runner函数中参数含义
具体含义可见 /home/qiancj/anaconda3/envs/mmdetection3d_randy/lib/python3.8/site-packages/mmengine/runner/runner.py 中 Runner类的解释
- model – 要运行的模型。 它可以是用于构建模型的字典。
- work_dir - 保存检查点的工作目录。 日志将保存在名为 timestamp 的 work_dir 子目录中
- train_dataloader - 用于构建数据加载器的数据加载器对象或字典。 如果给出“无”,则意味着跳过训练步骤。 默认为无。
- val_dataloader - 用于构建数据加载器的数据加载器对象或字典。 如果给出“无”,则意味着跳过验证步骤。 默认为无。
- test_dataloader - 用于构建数据加载器的数据加载器对象或字典。 如果给出“无”,则意味着跳过验证步骤。 默认为无。
- train_cfg – 建立训练循环的命令。 如果它没有提供“type”键,它应该包含“by_epoch”来决定应该使用哪种类型的训练循环EpochBasedTrainLoop或IterBasedTrainLoop。 如果指定了 train_cfg,则还应指定 train_dataloader。 默认为无。
- val_cfg – 用于构建验证循环的指令。 如果不提供“type”键,则默认使用 ValLoop。 如果指定了
val_cfg,则还应指定 val_dataloader。 如果 ValLoop 是用 fp16=True 构建的,runner.val() 将在 fp16 精度下执行。 默认为无。 有关详细信息,请参阅 build_val_loop()。 - test_cfg – 用于构建测试循环的指令。 如果不提供“type”键,默认使用TestLoop。 如果指定了
test_cfg,则还应指定 test_dataloader。 如果 ValLoop 是用 fp16=True 构建的,runner.val() 将在 fp16 精度下执行。 默认为无。 有关详细信息,请参阅 build_test_loop()。 - auto_scale_lr – 配置自动缩放学习率。 它包括
base_batch_size和enable。base_batch_size是优化器 lr 所基于的批量大小。enable是打开和关闭该功能的开关。 - optim_wrapper – 计算模型参数的梯度。 如果指定,还应指定 train_dataloader。 如果需要自动混合精度或梯度累积训练。
optim_wrapper的类型应该是 AmpOptimizerWrapper。 有关示例,请参见 build_optim_wrapper()。 默认为无。 - param_scheduler – 用于更新优化器参数的参数调度器。 如果指定,还应指定
optimizer。 默认为无。 有关示例,请参见 build_param_scheduler()。 - val_evaluator – 用于计算验证指标的评估器对象。 它可以是一个字典或一个字典列表来构建一个评估器。 如果指定,还应指定 val_dataloader。 默认为无。
- test_evaluator – 用于计算测试步骤指标的评估器对象。 它可以是一个字典或一个字典列表来构建一个评估器。 如果指定,还应指定 test_dataloader。 默认为无。
- default_hooks – 挂钩以执行默认操作,例如更新模型参数和保存检查点。 默认挂钩是
OptimizerHook、IterTimerHook、LoggerHook、ParamSchedulerHook和CheckpointHook。 默认为无。 - custom_hooks – 执行自定义操作的挂钩,例如可视化管道处理的图像。 默认为无。
- data_preprocessor –
BaseDataPreprocessor的预处理配置。 如果model参数是一个字典并且不包含键data_preprocessor,则将参数设置为model字典的data_preprocessor。 默认为无。 - load_from – 要从中加载的检查点文件。 默认为无。
- resume – 是否恢复训练。 默认为假。 如果
resume为 True 且load_from为 None,则自动从work_dir中查找最新的检查点。 如果未找到,则恢复不会执行任何操作。 - launcher – 启动器多进程的方式。 支持的发射器是“pytorch”、“mpi”、“slurm”和“none”。 如果提供“无”,将启动非分布式环境。
- env_cfg – 用于设置环境的字典。 默认为 dict(dist_cfg=dict(backend=‘nccl’))。
- log_processor – 用于格式化日志的处理器。 默认为无。
- log_level – MMLogger 处理程序的日志级别。 默认为“信息”。
- visualizer – Visualizer 对象或字典构建 Visualizer 对象。 默认为无。 如果未指定,将使用默认配置。
- default_scope – 用于重置注册表位置。 默认为“mmengine”。
- randomness – 一些设置使实验尽可能可重现,如种子和确定性。 默认为
dict(seed=None)。 如果 seed 为 None,则将生成一个随机数,如果在分布式环境中,它将被广播到所有其他进程。 如果env_cfg中的cudnn_benchmark为True但randomness中的deterministic为True,则torch.backends.cudnn.benchmark的值最终将为False。 - experiment_name – 当前实验的名称。 如果未指定,时间戳将用作“experiment_name”。 默认为无。
- cfg – 完整配置。 默认为无。
运行器对象可以通过“runner = Runner.from_cfg(cfg)”从配置构建其中“cfg”通常包含与训练、验证和测试相关的内容用于构建相应组件的配置。我们通常使用用于启动训练、测试和验证任务的相同配置。然而同时只需要其中一些组件,例如,测试模型不需要与训练或验证相关的组件。
为避免重复修改配置,“Runner”的构造采用延迟初始化,仅在组件将要初始化时对其进行初始化使用。因此,模型始终在开始时初始化,并且仅初始化训练、验证和测试相关组件’‘runner.train()’', '‘runner.val()’ 和 ‘‘runner.test()’’ 时分别调用。
结合图示来理清其中数据的流向与格式约定
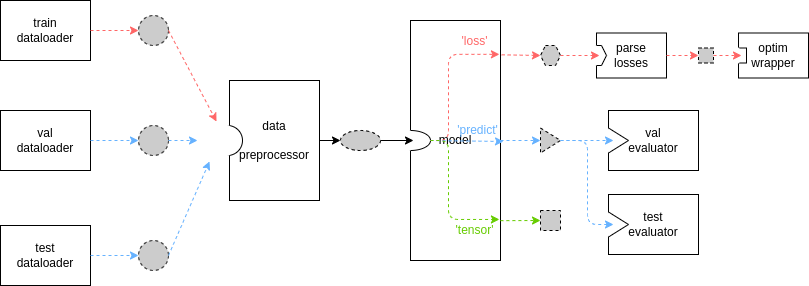
上图是执行器的基本数据流,其中虚线边框、灰色填充的不同形状代表不同的数据格式,实线方框代表模块或方法。由于 MMEngine 强大的灵活性与可扩展性,你总可以继承某些关键基类并重载其中的方法,因此上图并不总是成立。只有当你没有自定义 Runner 或 TrainLoop ,并且你的自定义模型没有重载 train_step、val_step 与 test_step 方法时上图才会成立(而这在检测、分割等任务上是常见的)。
dataloader、model 和 evaluator 之间的数据格式约定
# 训练过程 for data_batch in train_dataloader: data_batch = data_preprocessor(data_batch) if isinstance(data_batch, dict): losses = model.forward(**data_batch, mode='loss') elif isinstance(data_batch, (list, tuple)): losses = model.forward(*data_batch, mode='loss') else: raise TypeError() # 验证过程 for data_batch in val_dataloader: data_batch = data_preprocessor(data_batch) if isinstance(data_batch, dict): outputs = model.forward(**data_batch, mode='predict') elif isinstance(data_batch, (list, tuple)): outputs = model.forward(**data_batch, mode='predict') else: raise TypeError() evaluator.process(data_samples=outputs, data_batch=data_batch) metrics = evaluator.evaluate(len(val_dataloader.dataset))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
预处理模块及数据流变化
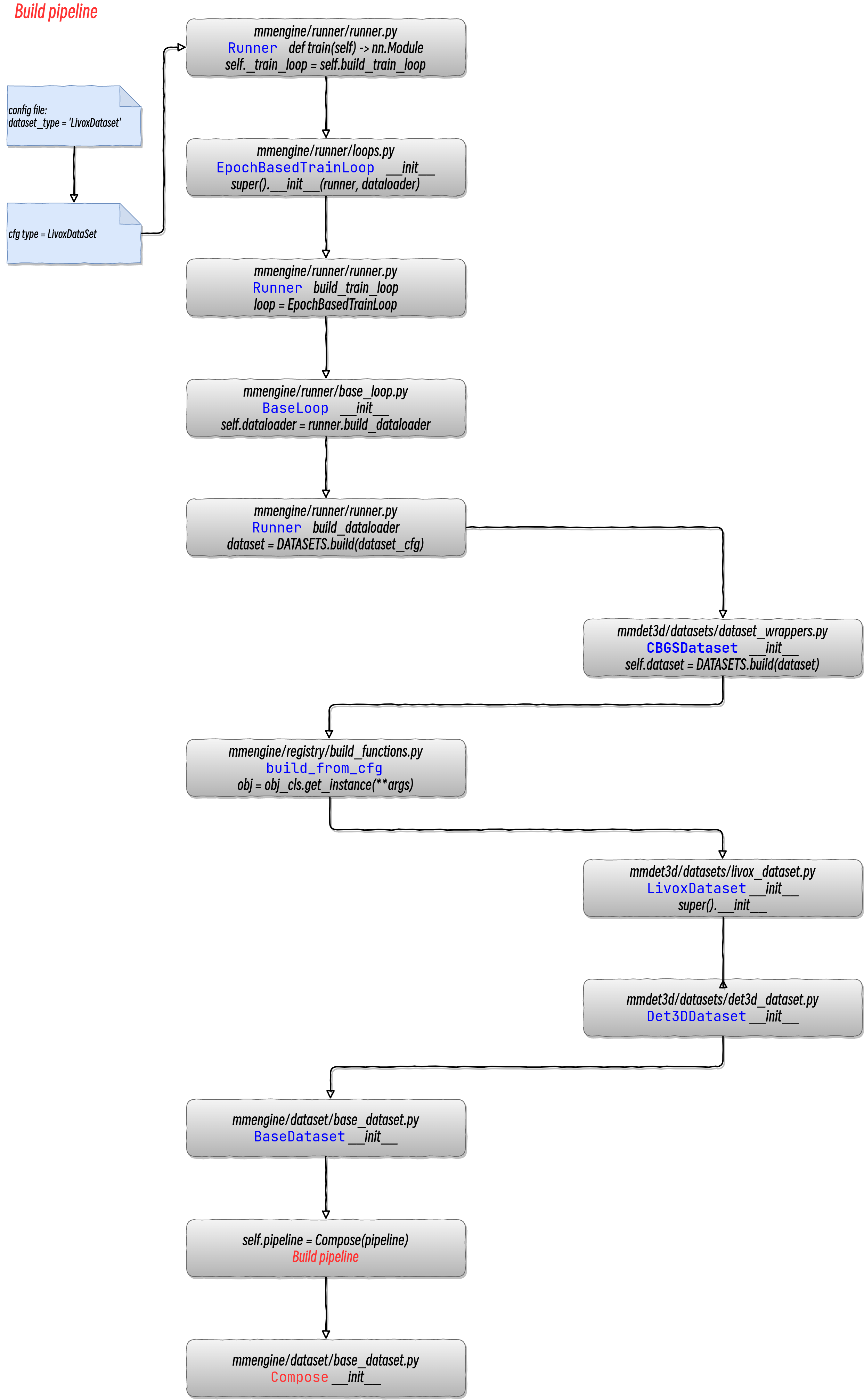
train pipeline
根据配置文件会生成 训练所用的pipeline
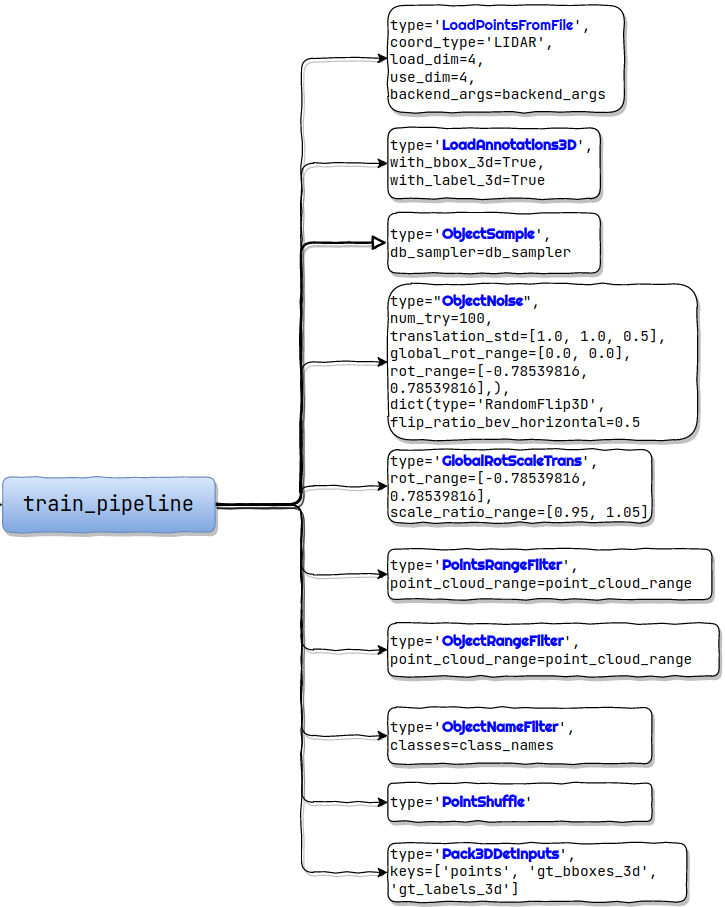
而代码中会将这些 pipeline 整合(Compose)到一起,然后循环调用
/home/qiancj/anaconda3/envs/mmdetection3d_randy/lib/python3.8/site-packages/mmengine/dataset/base_dataset.py
class Compose: """Compose multiple transforms sequentially. Args: transforms (Sequence[dict, callable], optional): Sequence of transform object or config dict to be composed. """ def __init__(self, transforms: Optional[Sequence[Union[dict, Callable]]]): self.transforms: List[Callable] = [] if transforms is None: transforms = [] # Randy: 这里将pipeline进行了整合 for transform in transforms: # `Compose` can be built with config dict with type and # corresponding arguments. if isinstance(transform, dict): transform = TRANSFORMS.build(transform) if not callable(transform): raise TypeError(f'transform should be a callable object, ' f'but got {type(transform)}') self.transforms.append(transform) elif callable(transform): self.transforms.append(transform) else: raise TypeError( f'transform must be a callable object or dict, ' f'but got {type(transform)}')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30

CenterPoint model
从注册表中生成model实例过程

生成的model结构体
CenterPoint( (data_preprocessor): Det3DDataPreprocessor( (voxel_layer): VoxelizationByGridShape(voxel_size=[0.2, 0.2, 12], grid_shape=[512, 512, 1], point_cloud_range=[-51.2, -51.2, -5.0, 51.2, 51.2, 3.0], max_num_points=10, max_voxels=(300, 400), deterministic=True) ) (pts_voxel_encoder): PillarFeatureNet( (pfn_layers): ModuleList( (0): PFNLayer( (norm): BatchNorm1d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (linear): Linear(in_features=10, out_features=64, bias=False) ) ) ) (pts_middle_encoder): PointPillarsScatter() (pts_backbone): SECOND( (blocks): ModuleList( (0): Sequential( (0): Conv2d(64, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False) (1): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) (3): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (4): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (5): ReLU(inplace=True) (6): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (7): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (8): ReLU(inplace=True) (9): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (10): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (11): ReLU(inplace=True) ) (1): Sequential( (0): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False) (1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) (3): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (4): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (5): ReLU(inplace=True) (6): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (7): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (8): ReLU(inplace=True) (9): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (10): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (11): ReLU(inplace=True) (12): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (13): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (14): ReLU(inplace=True) (15): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (16): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (17): ReLU(inplace=True) ) (2): Sequential( (0): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False) (1): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) (3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (4): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (5): ReLU(inplace=True) (6): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (7): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (8): ReLU(inplace=True) (9): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (10): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (11): ReLU(inplace=True) (12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (13): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (14): ReLU(inplace=True) (15): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (16): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (17): ReLU(inplace=True) ) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} (pts_neck): SECONDFPN( (deblocks): ModuleList( (0): Sequential( (0): Conv2d(64, 128, kernel_size=(2, 2), stride=(2, 2), bias=False) (1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) ) (1): Sequential( (0): Conv2d(128, 128, kernel_size=(1, 1), stride=(1, 1), bias=False) (1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) ) (2): Sequential( (0): ConvTranspose2d(256, 128, kernel_size=(2, 2), stride=(2, 2), bias=False) (1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True) (2): ReLU(inplace=True) ) ) ) init_cfg=[{'type': 'Kaiming', 'layer': 'ConvTranspose2d'}, {'type': 'Constant', 'layer': 'NaiveSyncBatchNorm2d', 'val': 1.0}] (pts_bbox_head): CenterHead( (loss_cls): GaussianFocalLoss() (loss_bbox): L1Loss() (shared_conv): ConvModule( (conv): Conv2d(384, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (task_heads): ModuleList( (0): SeparateHead( (reg): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (height): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (dim): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (rot): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (vel): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (heatmap): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} (1): SeparateHead( (reg): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (height): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (dim): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (rot): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (vel): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (heatmap): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} (2): SeparateHead( (reg): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (height): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (dim): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (rot): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (vel): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (heatmap): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} (3): SeparateHead( (reg): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (height): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (dim): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (rot): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (vel): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (heatmap): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} (4): SeparateHead( (reg): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (height): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (dim): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 3, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (rot): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (vel): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 2, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) (heatmap): Sequential( (0): ConvModule( (conv): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (activate): ReLU(inplace=True) ) (1): Conv2d(64, 1, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) ) ) init_cfg={'type': 'Kaiming', 'layer': 'Conv2d'} ) ) )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
生成epoch文件
work_dirs路径:
/home/qiancj/codes/mmdet3d_20220512/mmdetection3d/tools/work_dirs
- 1
work_dirs
└── centerpoint_pillar02_second_secfpn_8xb4-cyclic-20e_livox
├── 20230506_101711
│ ├── 20230506_101711.log
│ └── vis_data
│ ├── 20230506_101711.json
│ ├── config.py
│ └── scalars.json
├── centerpoint_pillar02_second_secfpn_8xb4-cyclic-20e_livox.py
├── epoch_20.pth
└── last_checkpoint
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
epoch_20.pth结构为:
.
└── archive
├── data
│ ├── 0
│ ├── ...
│ ├── 10
│ └── 99
├── data.pkl
└── version
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9

