
热门标签
热门文章
- 1vivado2016.1下载程序出错:End of startup status: LOW
- 2SQLite-net
- 3UPnP协议和SSDP协议_ssdp报文
- 4adb install 时 日志输出Performing Streamed Instal 一直卡着不动,处理方法_performing streamed install
- 5MySQL表操作插入数据insert语句学习_mysql insert
- 6随机森林及其超参数调整(1)_随机森林超参数选取
- 7线性规划LP和混合整数规划MIP基础知识_混合整数线性规划模型
- 8模拟相机视频输入方案-----模拟转MIPI /DVP方案_dvp 12bit 转mipi
- 9YOLO_V5_yolov5是算法还是框架
- 10【知识图谱】
当前位置: article > 正文
使用MissionStart执行航点的过程解读_mission planner控制无人船
作者:我家小花儿 | 2024-04-15 04:03:56
赞
踩
mission planner控制无人船
在使用Mission Planner进行控制无人机执行航点飞行的时候有两种方式,一种是解锁后使用Guided模式起飞到设定高度然后切入自动模式,另一种是使用航点自动指令执行起飞以及航点飞行。本文主要是对航点自动飞行指令的程序进行解读。
- 地面站操作
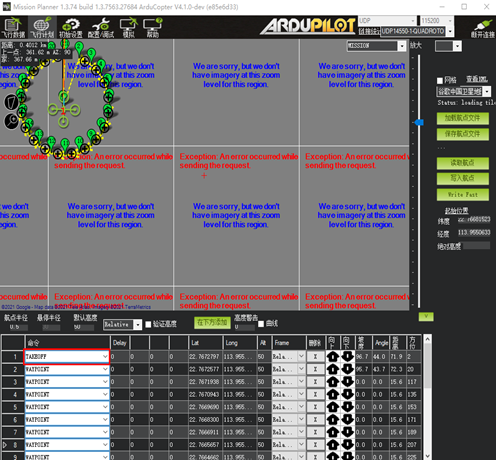
1)连上飞机后上传航点,并将第一个航点的命令设置为TAKEOFF类型,如图1所示
图1 设置第一个航点的类型
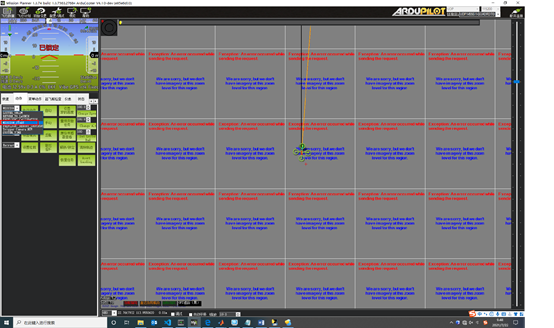
2)解锁,图2所示
图2 解锁

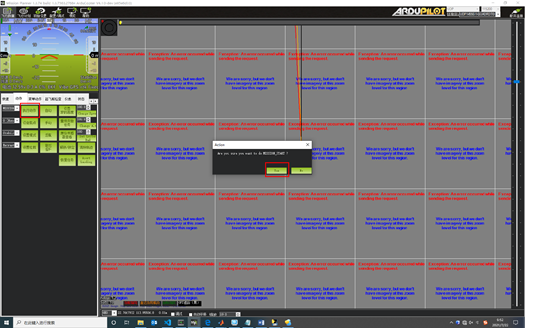
3)设置MISSION START,点击执行动作,图3所示
图3 设置MISSION START
4)执行动作
图4 执行动作
- 程序解读
(1) Copter.cpp SCHED_TASK_CLASS(GCS, (GCS*)&copter._gcs, update_receive, 400, 180),//调用任务检测地面站输入
(2) GCS_Common.cpp GCS::update_receive(void)
(3) GCS_Common.cpp chan(i)->update_receive(); //2059行 更新数据,i分别取值0,1,2,不知道为啥是三个gcs
(4) GCS_Common.cpp GCS_MAVLINK::update_receive(uint32_t max_time_us)//接收数据包
(5)GCS_Common.cpp packetReceived(status, msg);//数据接收
(6)GCS_Mavlink.cpp void GCS_MAVLINK_Copter::packetReceived(const mavlink_status_t &status,mavlink_message_t &msg)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/425767
推荐阅读

相关标签

