
- 1asp毕业设计——基于asp+access的物流管理系统设计与实现(毕业论文+程序源码)——物流管理系统_货运服务系统毕业设计关键词
- 2JMeter性能测试工具快速入门教程
- 3139、Rust加密利器:AES与RSA,ring库实战指南_rust ring rsa
- 4在线试听功能(前端直接略过吧,适合javaEE后台开发的)
- 5php学习笔记:获取小程序二维码_php 获取微信小程序二维码 base64
- 6MySQL:redo log buffer
- 7目标检测C-RNN,Fast C-RNN,Faster C-RNN,SSD,Mask R-CNN 理论简单介绍_crnn和faster r-cnn
- 8AI之LLM/MLM:Nvidia官网人工智能大模型工具合集(大语言模型/多模态模型,文本生成/图像生成/视频生成)的简介、使用方法、案例应用之详细攻略_英伟达官网使用大模型
- 9蓝易云:Ubuntu 20.04源码安装nginx 1.14步骤详述
- 10python自然语言处理 分词_Python自然语言处理(一)--利用NLTK自带方法完成NLP基本任务...
计算机控制系统的典型类型是什么,计算机控制系统作业参考答案
赞
踩
 计算机控制系统作业参考答案
计算机控制系统作业参考答案
(15页)
本资源提供全文预览,点击全文预览即可全文预览,如果喜欢文档就下载吧,查找使用更方便哦!
9.90 积分
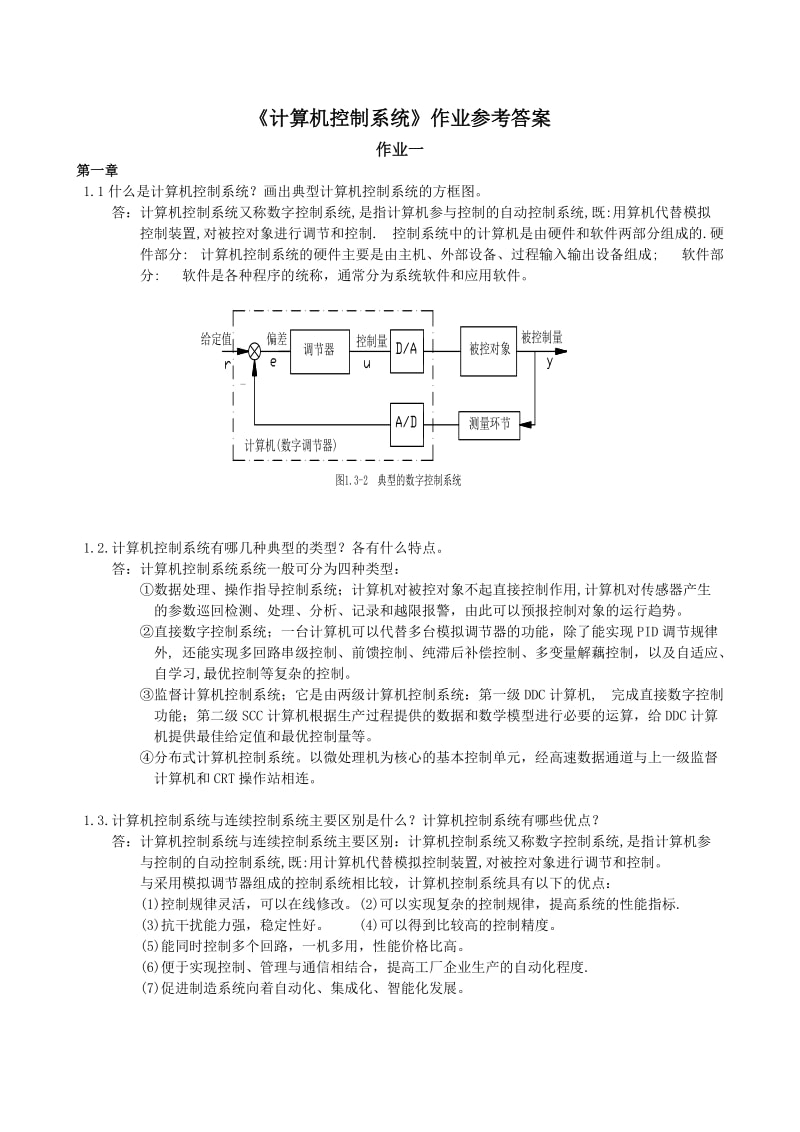
计算机控制系统作业参考答案作业一第一章11什么是计算机控制系统画出典型计算机控制系统的方框图。答计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既用算机代替模拟控制装置,对被控对象进行调节和控制控制系统中的计算机是由硬件和软件两部分组成的硬件部分计算机控制系统的硬件主要是由主机、外部设备、过程输入输出设备组成软件部分软件是各种程序的统称,通常分为系统软件和应用软件。12计算机控制系统有哪几种典型的类型各有什么特点。答计算机控制系统系统一般可分为四种类型①数据处理、操作指导控制系统;计算机对被控对象不起直接控制作用,计算机对传感器产生的参数巡回检测、处理、分析、记录和越限报警,由此可以预报控制对象的运行趋势。②直接数字控制系统;一台计算机可以代替多台模拟调节器的功能,除了能实现PID调节规律外,还能实现多回路串级控制、前馈控制、纯滞后补偿控制、多变量解藕控制,以及自适应、自学习,最优控制等复杂的控制。③监督计算机控制系统;它是由两级计算机控制系统第一级DDC计算机,完成直接数字控制功能;第二级SCC计算机根据生产过程提供的数据和数学模型进行必要的运算,给DDC计算机提供最佳给定值和最优控制量等。④分布式计算机控制系统。以微处理机为核心的基本控制单元,经高速数据通道与上一级监督计算机和CRT操作站相连。13计算机控制系统与连续控制系统主要区别是什么计算机控制系统有哪些优点答计算机控制系统与连续控制系统主要区别计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既用计算机代替模拟控制装置,对被控对象进行调节和控制。与采用模拟调节器组成的控制系统相比较,计算机控制系统具有以下的优点1控制规律灵活,可以在线修改。2可以实现复杂的控制规律,提高系统的性能指标3抗干扰能力强,稳定性好。4可以得到比较高的控制精度。5能同时控制多个回路,一机多用,性能价格比高。6便于实现控制、管理与通信相结合,提高工厂企业生产的自动化程度7促进制造系统向着自动化、集成化、智能化发展。计算机数字调节器图132典型的数字控制系统控制量被控对象测量环节被控制量调节器_给定值偏差第二章21计算机控制系统有哪四种形式的信号各有什么特点答在计算机控制系统中,通常既有连续信号也有离散信号,这些信号一般是信息流,而不是能量流。可分为四种形式⑴连续模拟信号时间和信号的幅值都是连续的。⑵阶梯模拟信号时间是连续的,信号的幅值是阶梯形的。⑶采样信号时间是离散的,信号的幅值是连续的脉冲信号。⑷数字信号信号的时间以及幅值都是离散的,且幅值经过了量化处理。22采样信号的频谱和原连续信号的频谱有何不同答采样信号的频谱和原连续信号的频谱的区别①通常,连续信号带宽是有限的,频率的极限值WMAX,它的频谱是孤立的。采样信号的频谱是以ΩS为周期的无限多个频谱所组成。②∣YJW∣和∣YJW∣形状相似。幅值只差一个比例因子1/T又称为采样增益。23计算机控制系统中的保持器有何作用,简述零阶保持器的特点。答保持器的原理是根据现在时刻或过去时刻输入的离散值,用常数、线性函数或抛物函数形成输出的连续值。零阶保持器有如下特性①低通特性保持器的输出随着信号频率的提高,幅值迅速衰减。②相位滞后持性信号经过零阶保持器会产生相位滞后,它对控制系统的稳定性是不利的。24试求下例函数的Z变换采样周期为T答(1)(2)FTT??9T0F??????1FZ21TZF?(3)(4)K1A,23F0???????ATESINT0FT0??????ZFA?22ICOSATATZFZEE???25设函数的LA氏变换如下,试求它们的Z变换答(1)(2)S3F21??21FS5??2TTZE??52TZE?(3)(4)31FS?210FS??231TZ??21TTZEZ??(5)20FS6?5SIN4CO1ZZT??26已知函数的Z变换如下,试求它们的YKT答(1)(2)2ZY1?2ZY1??KYKT?KYT(3)(4)2ZY1??1YZ02??4KKYKT?5KYKT(5)(6)206ZZ1??113ZZ08????5KKYKT?56KKYKT(7)(8)412ZY??AT2EZY??3YKTAKTY?27求下列函数的初值和终值答(1)(2)27ZF08??216ZF085???Y?Y?作业二第三章31已知差分方程,又知试用Z变换法求XKTA1KT??XK01A???XKT和X∞。答1KAX???32已知,试用长除法和Z反变换法求解FKT。2ZF10??答234418296FKTZZZ??????5KKF?33已知差分方程,⑴用递推法求YK的前三项。⑵用反变换法求解Y120,Y1??YK。答(1)438???(2)2KYT34用Z变换法求解下例差分方程答(1)KF1FA,F0???2KYT?(2)其中,且时F3F12FKR?F01?K0?F0?0KR,??????12KFT??(3)其中YK?Y01?039K35利用劳斯判据,决定下列单位负反馈系统闭环稳定时,K的取值范围。(1)答K01Z8G7???0375K?2答KZ1236已知下列系统的特征方程,试判别系统的稳定性。(1)答系统不稳定。2Z590??(2)答系统不稳定。3?(3)答系统稳定。2ZZ437设离散系统的框图如图所示,试确定闭环稳定时K的取值范围(其中T1S,K12T11_题图37单位反馈闭环系统框图答2073618036124005ZHGZKK??????38用长除法或Z反变换法或迭代法求下列闭环系统的单位阶跃响应。(1)C2ZG305???答1120526YKTRRKTYKTYKT???即7336Y????(2)C205ZG???答13456712509350,05,,,12,12679YZZZZZYTYTYYT???????????(3)CZ04GZ1859??答05217608642YKTRKTRKTYKTYKT?????,,083,0,Y???39开环数字控制系统如图所示,试求YZ、Y0、Y∞已知1ES(1)数字调节器UK1EK????被控对象GPS(2)数字调节器05E95E0UK?被控对象P1SS2??答(1)201TZYZYY???(2)259450TTZZEYY?????310设系统如图所示,试求系统的闭环脉冲传递函数。_答12GZ??311设系统如图所示,试求(1)系统的闭环脉冲传递函数。(2)判定系统的稳定性。(3)分别求系统对单位阶跃输入和单位斜坡输入时的稳态误差。_答(1)21703BZG??(2)系统稳定。(3)单位阶跃输入SE单位斜坡输入时05S?第四章41已知系统的运动方程,试写出它们的状态方程和输出方程(1)32Y5YU2?????答??1122331230050XXUXY???????????????????????????(2)32YYU???答??112233123000XXUXY??????????????????????????(3)322U????答??11223312300XXUXY???????????????????????????42已知下列系统的传递函数,试写出它们的状态方程和输出方程(1)23S5G691??答112233123005XXUXY??????????????????????????????(2)325SGS??答??1122331230050XXUXY???????????????????????????43已知系统的传递函数,试写出其状态方程,使状态方程为对角阵。32S1GS748?答11223312304176XXUXY????????????????????????????44已知系统的传递函数,试写出其状态方程,使状态方程为若当标准型。23S5G4?答??1122331230XXUXY???????????????????????????45已知下列离散系统的差分方程为(1)YK212YK4U???(2)YK513YKU12K????输出为YK,,试分别写出它们的状态方程和输出方程。答(1)??1122120034XKTXKTUKY??????????????????????(2)??1122120353XKTXKTUKY???????????????????????46已知离散系统脉冲传递函数,试分别用直接程序法和分式展开法求系统的离散状2Z1G56??态方程。答直接程序法??11221200653XKTXKTUKY??????????????????????分式展开法??112212034XKTXKTUKY??????????????????????47求解下系统的时间相应。已知,初始状态X000XT340??????????????答1423TXTE???????????48设系统的状态方程XK1FGUK??YCXK???01,,06??????????已知输入UK1,K≥0初始状态12XX0???????试求(1)系统的状态转移矩阵FK;2状态方程的解XK;3系统的输出YK。答(1)402850283384KKKKKKKKKT????????????(2)1231850283018996673KKXKT????????????????(3)1KKYKX49已知离散系统的状态空间表达式,,初始状态X00??10512XXUK2YKK???????????????试求系统的Z传递函数YZGU答21095YZZ???410已知离散系统的状态方程,试判断系统的稳定性。40606XKTXKTUK4???????????????答系统稳定。作业三第五章51已知连续系统的传递函数(1);(2),试用冲击不变法﹑GS1S??SAGB??阶跃不变法﹑零极点匹配法﹑双线性变换法、差分变换法,将上述传递函数转换为等效的Z传递函数取采样周期T01S答(1)冲击不变法2TTZE???(2)阶跃不变法2211BTABAZZGZE??52已知比例积分模拟调节器DSKPKI/S,试用后向差分法和双线性变换法求数字调节器D(Z)及其控制算法。答后向差分法1IPKTZDZ???双线性变换法2IPZZ53已知Z传递函数,试分析其频率特性,并判断它是低通滤波器还是高通滤波器。07G???答2110COS7SINSINSINCO07CO02JTJJTETTTTGTG???????????具有高通特性。54已知系统的差分方程为,其中XK为输入序列,YK为YK081XK21????输出序列试分析其频率特性答21108COSSINSINSINCO2CO08JTJJTEGTTTTGTG???????????具有高通特性。55已知低通滤波器,求D(Z)的带宽ΩM取采样周期T2MS。0526DZ473??答69/MS?弧度56已知广义对象的Z传递函数,试设计PI调节器DZKPKI/1Z1,05Z7HG98???使速度误差ESS01,取采样周期T01S。答10235DZZ???57已知,写出与它相对应的PID增量型数字控制算法。1SS答203UKTEKTEKU?????????第六章61试述在最少拍设计中,系统的闭环Z传递函数GCZ和误差Z传递函数GEZ的选择原则。答最少拍设计中,系统的闭环Z传递函数GCZ和误差Z传递函数GEZ的选择原则(1)为了保证DZ的可实现性,应选择GCZ含有HGZ的ZR因子。(2)为了保证DZ的稳定性,应选择GCZ具有与HGZ相同的单位圆上除Z=L外和单位圆外的零点。(3)为了保证系统的稳定性,应选择GEZ含有的因子,PI是HGZ的不稳定的极点。因为只能用GEZ的零点来抵消HGZ中不稳定的极点(4)为了使调节时间最短最少拍,应选择GEZ中含有1Z1M因子M=L,2,3是典型输入信号Z变换RZ中分母的因子。(5)保持GEZ与GCZ有相同的阶次。62最少拍控制系统有哪几种改进设计方法。答最少拍控制系统改进设计方法有调节器的设计方法的改进惯性因子法,延长节拍法,换接程序法。63已知不稳定的广义对象,试设计单位阶跃作用下的最少拍调节器。12ZHG???CEGZ1??1IPZ?CEGZDHZ?答021ZD???64已知的广义对象Z传递函数,试设计单位阶跃作用下1110265Z7802ZHG6?????的最少拍无波纹调节器。答12083617ZDZ???65设系统的结构如下图所示,被控对象,采样周期T02S,试设计单D10WSS5??位阶跃作用下的最少拍调节器DZ。_答111110763047855ZZZHGDZZZ???????66已知被控对象,采用零阶保持器,采样周期T01S试用W变换法设计数字调节器,GS2??要求相位裕度Γ50°,幅值裕度KG10DB,速度稳态误差系数KV5S1。_答101895062352190874KZGZWWDZDZ??????67已知被控对象的传递函数,取采样周期T5S试用大林算法设计数字调节器DZ,期10SEG???望的闭环传递函数为。10SC2?答13459107ZDZ??? 关 键 词: 计算机 控制系统 作业 参考答案
 天天文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
天天文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。

