
- 1java比较字符串大小写_java 字符串中判断字母大小写方法
- 2创建一个简单鸿蒙app项目_鸿蒙简单开发app实例代码
- 3深入理解计算机系统 CSAPP 家庭作业6.40
- 4【STM32HAL库学习】SysTick延时_hal库systick
- 5「五度易链」企业大数据API接口开放平台上线啦!
- 6【UE】AI行为树入门——以小白人跟踪玩家并攻击为例_ue ai行为树
- 7海云安荣登《嘶吼2023中国网络安全产业势能榜》 获评金融行业专精型安全厂商
- 8table() function
- 9105、基于STM32单片机倒车雷达超声波测距报警系统LCD1602设计(程序+原理图+PCB源文件+任务书+参考论文+开题报告+流程图+硬件设计资料+元器件清单等)_基于stm32单片机的停车雷达监测系统设计
- 10如何强制umount
目标检测知识点:传统方法、One-stage、Two-stage、RPN、MTCNN_mtcnn是onestage
赞
踩
目标检测知识点:传统方法、One-stage、Two-stage、RPN、MTCNN
前言
- 本文是个人收集、整理、总结的一些人工智能知识点,由于本人水平有限,难免出现错漏,敬请批评改正。
- 由于本文是对知识点的收集和整理,图片基本来源于网络,图片若侵权,可联系删除。
- 更多精彩内容,可点击进入人工智能知识点
专栏、Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏或我的个人主页查看- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目
传统目标检测方法(了解)
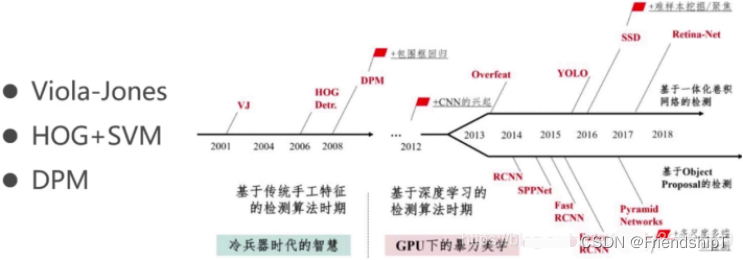
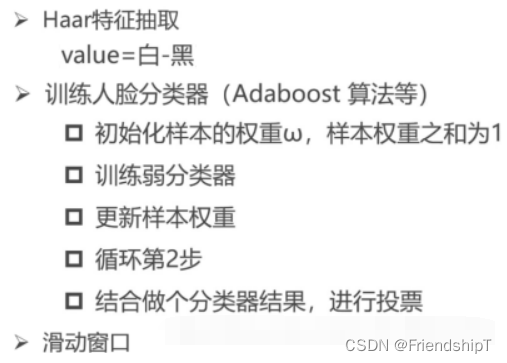
Viola-Jones (人脸检测)
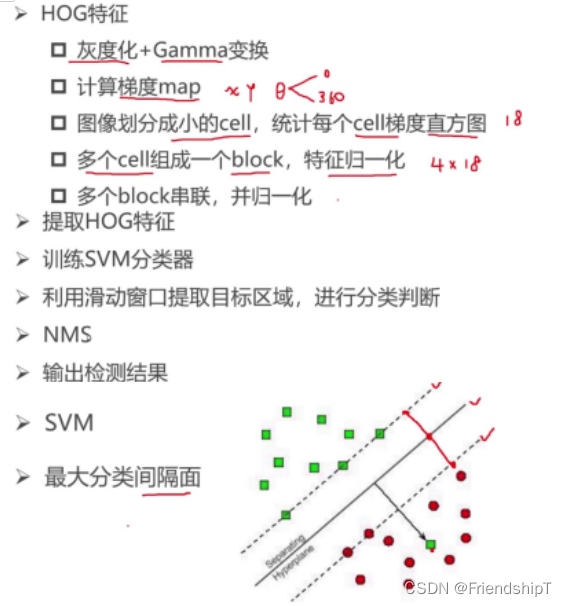
HOG+SVM (行人检测、Opencv实现)
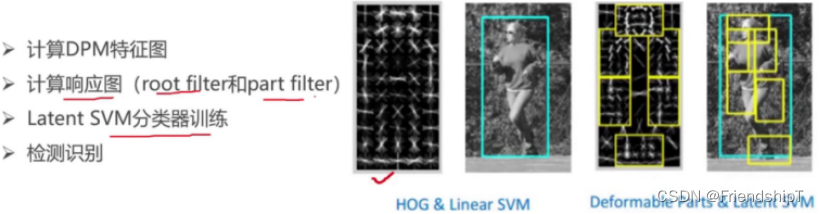
DPM (物体检测)
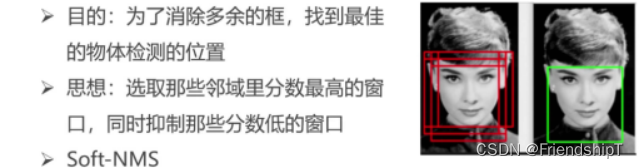
NMS (非极大值抑制算法)
NMS基本思路:
- 利用得分,给检测框排序: 选出最大得分的检测框A1,将与A1的IOU重叠率高的检测框,进行删除,
- 其余的剩下的检测再次排序,选择最大的A2,将与A2的IOU重叠率高的检测框,再次进行删除,
- …迭代多次
One stage

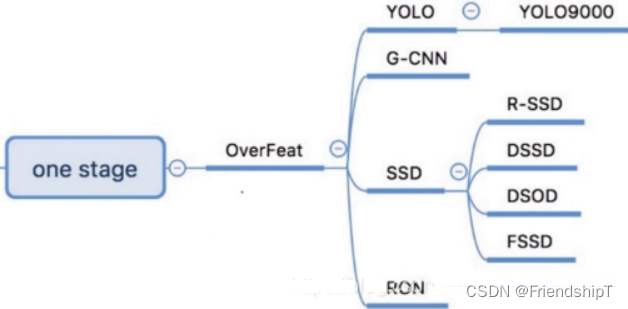
YOLO体系变化
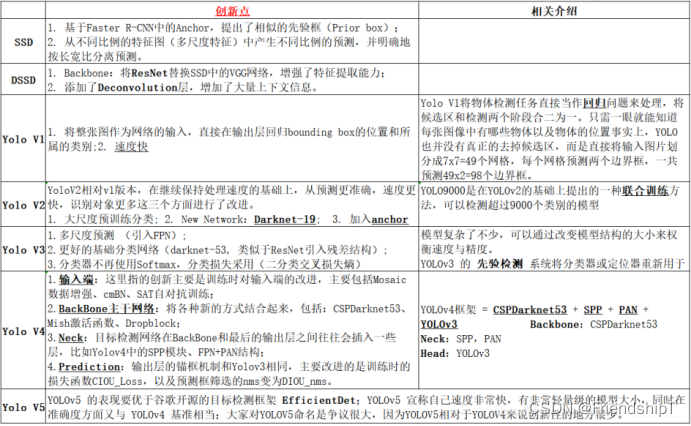
- 注:cmBN = Conv + Mish + BatchNorm
YOLO网络结构是怎样的?
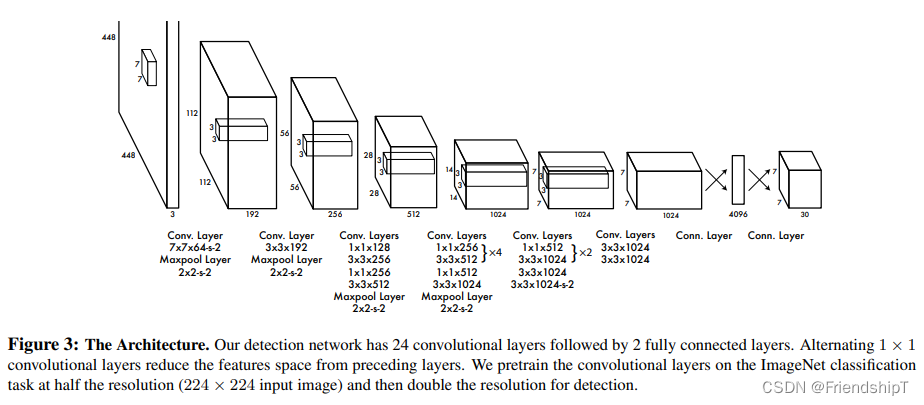
- 推荐阅读:Yolov5 系列1— Yolo发展史以及Yolov5模型详解
- YOLO网络借鉴了GoogLeNet分类网络结构,不同的是YOLO使用1x1卷积层和3x3卷积层替代inception module。如下图所示,整个检测网络包括24个卷积层和2个全连接层。其中,卷积层用来提取图像特征,全连接层用来预测图像位置和类别概率值。
2.3 YOLO的输入、输出、损失函数分别是什么?
- YOLO将输入图像分成7x7的网格,最后输出是7x7xk的张量。
- YOLO网络最后接了两个全连接层,全连接层要求输入是固定大小的,所以YOLO要求输入图像有固定大小,论文中作者设计的输入尺寸是448x448。
YOLO怎样预测?
- 采用 NMS 算法从输出结果中提取最有可能的对象和其对应的边界框。
- 推荐阅读:手写NMS
- NMS步骤如下:
1.设置一个Score的阈值,一个IOU的阈值;
2.对于每类对象,遍历属于该类的所有候选框,
①过滤掉Score低于Score阈值的候选框;
②找到剩下的候选框中最大Score对应的候选框,添加到输出列表;
③进一步计算剩下的候选框与②中输出列表中每个候选框的IOU,若该IOU大于设置的IOU阈值,将该候选框过滤掉,否则加入输出列表中;
④最后输出列表中的候选框即为图片中该类对象预测的所有边界框
3.返回步骤2继续处理下一类对象。
YOLOv3不使用Softmax对每个框进行分类的原因?
- Softmax使得每个框分配一个类别(score最大的一个),而对于Open Images这种数据集,目标可能有重叠的类别标签,因此Softmax不适用于多标签分类。
- Softmax可被独立的多个logistic分类器替代,且准确率不会下降。
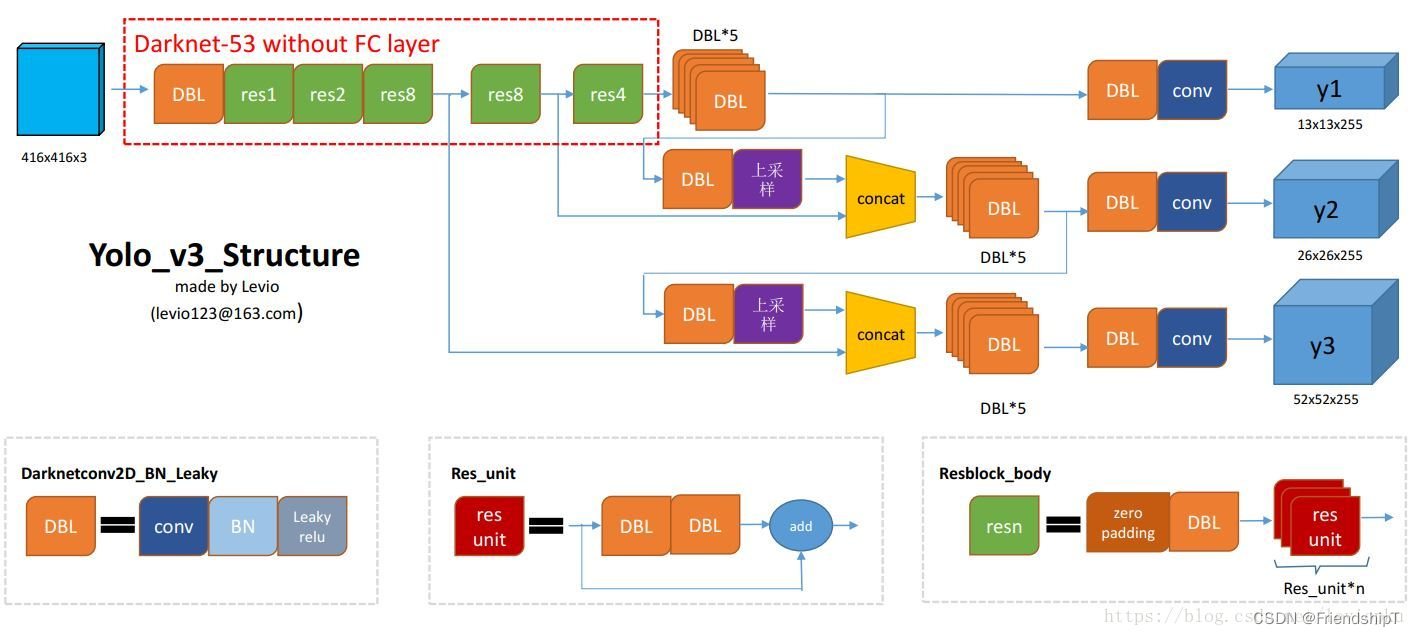
YOLOv3的架构
YOLOv3在之前Darknet-19的基础上引入了残差块,并进一步加深了网络,改进后的网络有53个卷积层,取名为Darknet-53。
- 推荐阅读:yolo系列之yolo v3【深度解析】
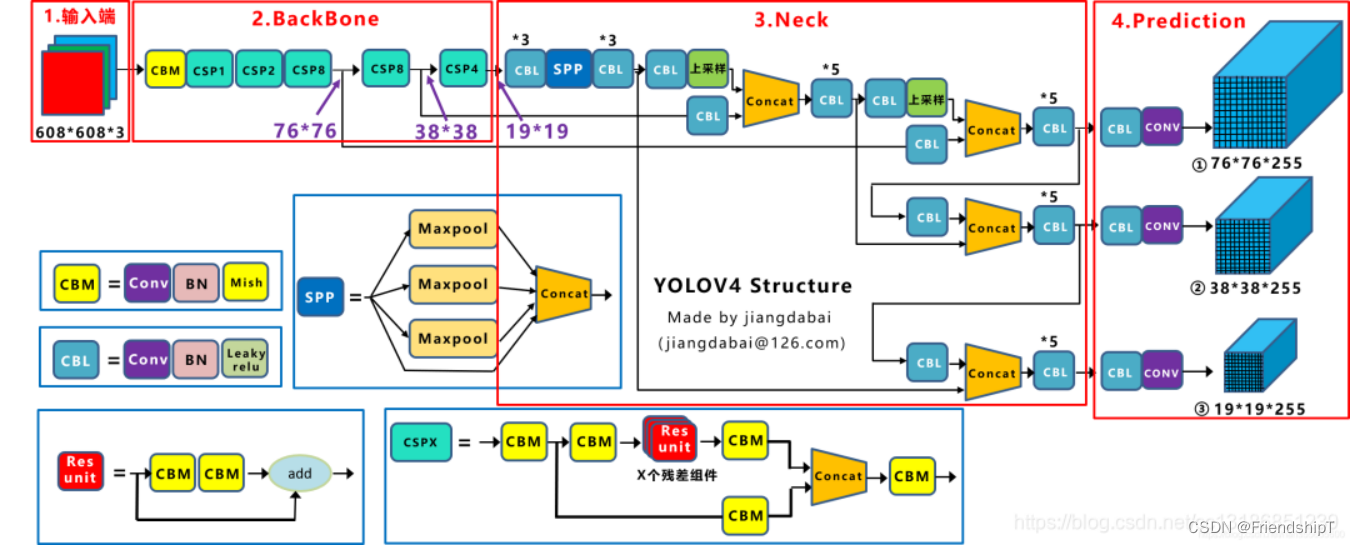
YOLOv4的架构
注:图片若侵权,可联系删除。
CSPDarknet53
解决了其他大型CNN框架Backbone中网络优化的梯度信息重复问题,将梯度的变化从头到尾地集成到特征图中,因此减少了模型的参数量和FLOPS(每秒浮点运算次数)数值,既保证了推理速度和准确率,又减小了模型尺寸。
BackBone训练策略
1.采用了Mosaic数据增强
(参考了CutMix数据增强; 区别:Mosaic是一种将4张训练图像合并成一张进行训练的数据增强方法(而不是CutMix中的2张)。
每个小批包含一个大的变化图像(4倍),减少了估计均值和方差的时需要大mini-batch的要求,降低了训练成本。
2.DropBlock正则化(引入:克服Dropout随机丢弃特征):块的相邻相关区域中丢弃特征。
3.类标签平滑
检测头训练策略
1.CIoU-loss: CIOU只是在DIOU基础上增加了一项 av
2.CmBN策略: 只在每个Batch内部使用CBN的方法
3.SAT:
第一阶段:NN改变原始图像而不是网络权值。通过这种方式,NN对其自身进行一种对抗式的攻击,改变原始图像,制造图像上没有目标的假象;
第二阶段:训练NN对修改后的图像进行正常的目标检测。
消除网格敏感度
4.单目标使用多Anchor
5.余弦模拟退火
检测头推理策略
Mish, SPP, PAN,SAM和DIoU-NMS
为了增大感受野,使用了SPP-block(对任意尺寸的特征图直接进行固定尺寸的池化-> 固定数量的特征),使用PAN代替FPN进行参数聚合以适用于不同level的目标检测。
SPP:用来解决不同尺寸的特征图如何进入全连接层的
PAN: 代替FPN进行参数聚合以适用于不同level的目标检测,YOLOv4算法将融合的方法由addition改为Concatenation
DarkNet-53相对DarkNet-19的有如下几点改进:
1.加深网络层,精度提升,但是速度有所下降,
2.进入了残差网络resNet模块,防止梯度下降;
3.用卷积strid==2代替了池化,防止信息丢失
4.使用SPP实现多尺寸输入,同尺寸输出。
名词解释:
CSPNet (跨阶段局部网络)
SPP-Net(空间金字塔池化网络): Spatial Pyramid Pooling Networks
PAN(路径聚合网络) : Path Aggregation Network
SAT(自对抗训练) : Self-Adversarial Training
YOLOv5的架构
yolo5原理
原理可以分为四部分:输入端、backbone、Neck、输出端;
- 输入端:针对小目标的检测,沿用了v4的mosaic增强,当然这个也是v5作者在他复现的v3上的原创,对不同的图片进行随机缩放、裁剪、排布后进行拼接;二是自适应锚框计算,在v3、v4中,初始化锚框是通过对coco数据集的进行聚类得到,v5中将锚框的计算加入了训练的代码中,每次训练时,自适应的计算不同训练集中的最佳锚框值;
- backbone:沿用了V4的CSPDarkNet53结构,但是在图片输入前加入了Focus切片操作==(6.1版本后,用Conv替代了)==,CSP结构实际上就是基于Densnet的思想,复制基础层的特征映射图,通过dense block发送到下一个阶段,从而将基础层的特征映射图分离出来。这样可以有效缓解梯度消失问题,支持特征传播,鼓励网络重用特征,从而减少网络参数数量。在V5中,提供了四种不同大小的网络结构:s、m、l、x,通过depth(深度)和width(宽度)两个参数控制。
- Neck:采用了SPP+PAN多尺度特征融合,PAN是一种自下而上的特征金字塔结构,是在FPN的基础上进行的改进,相对于FPN有着更好的特征融合效果。
- 输出端:沿用了V3的head,使用GIOU损失进行边框回归,输出还是三个部分:置信度、边框信息、分类信息。
yolov5引入了CSP结构,介绍一下它的原理和作用?
CSP结构是一种思想,它和ResNet、DenseNet类似,可以看作是DenseNet的升级版,它将feature map拆成两个部分:
一部分进行卷积操作;
另一部分和上一部分卷积操作的结果进行concate。
主要解决了三个问题:
- 增强CNN的学习能力,能够在轻量化的同时保持着准确性;
- 降低计算成本;
- 降低内存开销。
CSPNet改进了密集块和过渡层的信息流,优化了梯度反向传播的路径,提升了网络的学习能力,同时在处理速度和内存方面提升了不少。
为什么SSD对小目标检测效果不好?
小目标对应的anchor比较少,其对应的feature map上的pixel难以得到训练,这也是为什么SSD在augmentation之后精确度上涨(因为crop之后小目标就变为大目标)要检测小目标需要足够大的feature map来提供精确特征,同时也需要足够的语义信息来与背景作区分。
Anchor
定义: 提前在图像上预设好的不同大小,不同长宽比的框;同一位置设置多个不同尺度先验框
为什么引入Anocher?
使得模型更容易学习。使用anchor boxes之后,YOLOv2的召回率大大提升,所以在Yolo之后的版本中,均保留了先验框。
Anocher为什么要使用不同尺寸和长宽比?
为了得到更大的交并比
Anochor Box的尺寸该怎么选择?
在SSD、Faster-RCNN中,设计了9个不同大小和宽高比的anchor;
anchor box的选择主要有三种方式:
- 人为经验选取;
- k-means聚类;
- 作为超参数进行学习
YOLOv2中建议使用K-means聚类来代替人工设计,通过对训练集的bbox进行聚类,自动生成一组更加适合数据集的anchor,可以使网络的检测效果更好。
虽然设置更多的先验框,IOU能获得一定的提升,但模型的复杂度随之增加,YOLOv2的作者选择了K=5个先验框。
Two stage
概念:先由算法生成一系列作为样本的候选框,再通过卷积神经网络进行样本分类。
主要是R-CNN,SPP系列,Fast R-CNN,Faster R-CNN等;
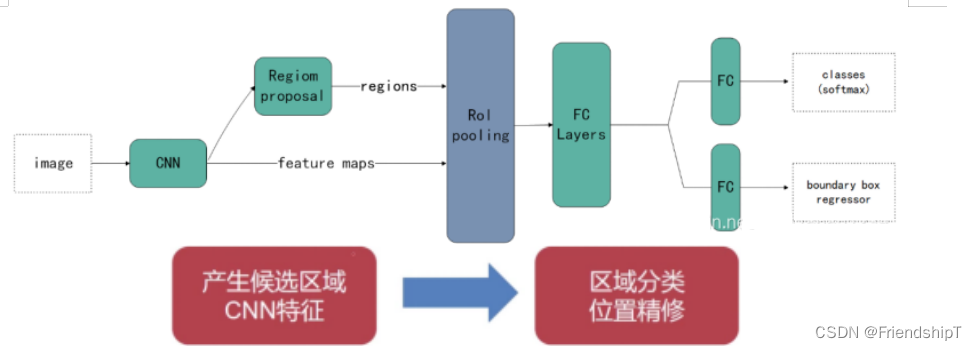
目标检测方法概述:
主要通过一个CNN来完成目标检测过程,其提取的是CNN卷积特征,在训练网络时,其主要训练两个部分,第一步是训练RPN网络,第二步是训练目标区域检测的网络。
网络的准确度高、速度相对One-stage慢。
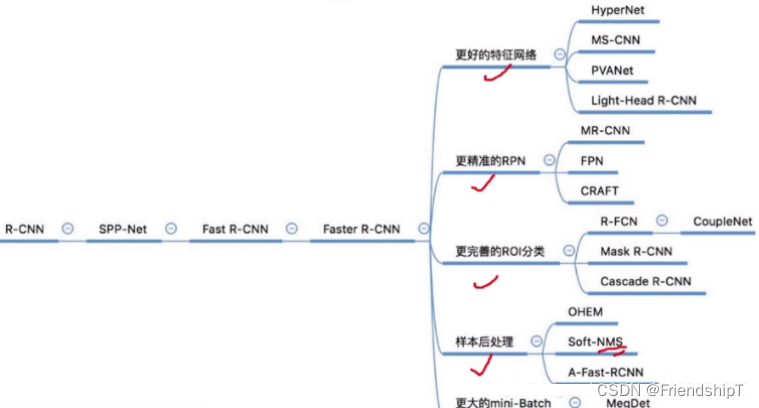
Faster R-CNN
Fast R-CNN依赖于外部候选区域方法,如选择性搜索。在测试中,Fast R-CNN需要2.3秒来进行预测,其中2秒用于生成2000个ROI。Faster R-CNN采用与Fast R-CNN相同的设计,只是它用内部深层网络代替了候选区域方法。新的候选区域网络(RPN)在生成ROI时效率更高,并且以每幅图像10毫秒的速度运行。
Faster RCNN的loss有哪些?分别如下。
第一部分为分类损失,第二部分为回归损失
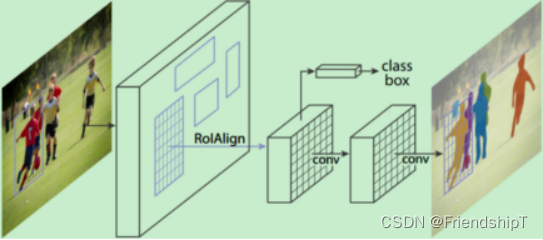
Mask RCNN
创新点:
- Backbone:ResNeXt-101 + FPN
- RoI Align替换RoI Pooling
是一个实例分割算法,主要是在目标检测的基础上再进行分割。算法主要是Faster R-CNN+FCN,更具体一点就是ResNeXt + RPN + RoI Align + Fast R-CNN + FCN。
Mask R-CNN算法步骤: - 输入一幅你想处理的图片,然后进行对应的预处理操作,或者预处理后的图片;
- 将其输入到一个预训练好的神经网络中(ResNeXt等)获得对应的feature map;
- 对这个feature map中的每一点设定预定个的RoI,从而获得多个候选RoI;
- 将这些候选的RoI送入RPN网络进行二值分类(前景或背景)和BB回归,过滤掉一部分候选的RoI;
- 对这些剩下的RoI进行RoI Align操作;
- 对这些RoI进行分类(N类别分类)、BB回归和MASK生成(在每一个RoI里面进行FCN操作)。
ROI
RoI是Region of Interest,一般是指图像上的区域框,但这里指的是由Selective Search提取的候选框。往往经过RPN后输出的不止一个矩形框,所以这里我们是对多个RoI进行Pooling。
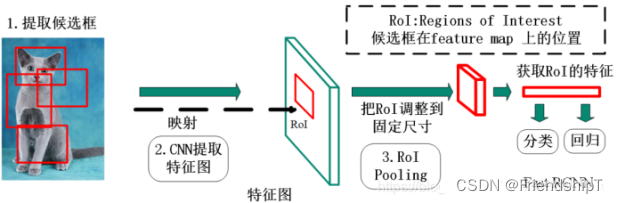
ROI Pooling
目的是对非均匀尺寸的输入执行最大池化以获得固定尺寸的特征图。
我们获得的anchor尺寸是不同的,能直接对其全连接,应该将区域提案划分为相等大小的部分(其数量与输出的维度相同)
;然后进行max pooling.
ROI Polling Vs ROI Align
ROIPool存在两次量化误差,首先是将候选框边界量化为整数点坐标值,其次是将量化后的边界区域平均分割成 k x k 个单元,对每一个单元的边界进行量化。ROIAlign通过双线性插值避免了量化操作,保存了原始ROI的空间分布,有效避免了误差的产生;对于检测图片中大目标物体时,两种方案的差别不大,而如果是图片中有较多小目标物体需要检测,则优先选择ROIAlign,更精准一些。
目标检测回归损失函数有哪些?
演进路线是:
Smooth L1 Loss --> IoU Loss --> GIoU Loss --> DIoU Loss --> CIoU Loss
GIoU loss 仍然存在收敛速度慢、回归不准等问题
目标检测中IOU是如何计算的? 检测结果与 Ground Truth 的交集比上它们的并集。
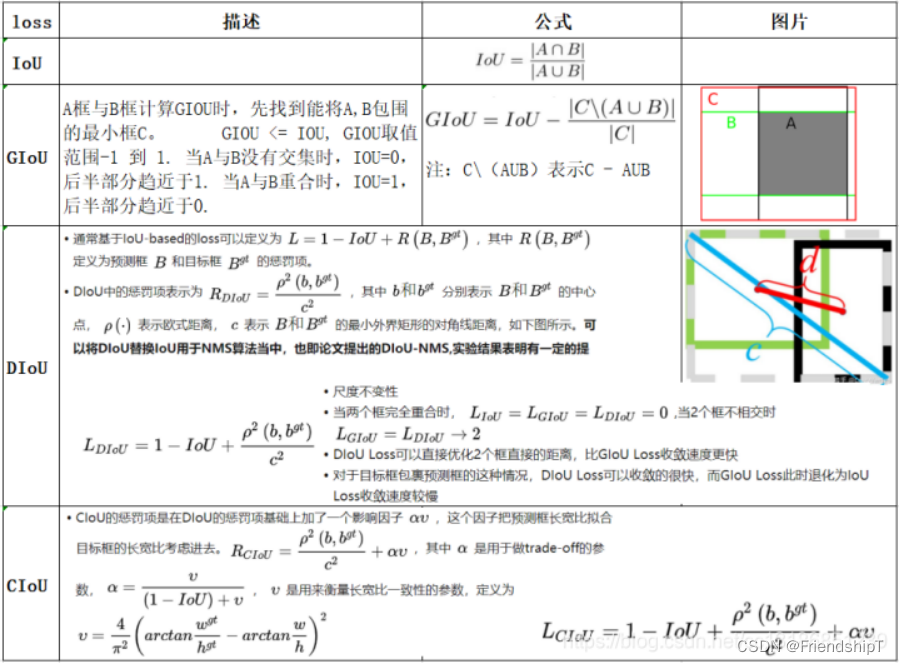
IOU 为 0 时,两个框不重叠,没有交集。
IOU 为 1 时,两个框完全重叠。
IOU 取值为 0 ~ 1 之间的值时,代表了两个框的重叠程度,数值越高,重叠程度越高。
One Stage Vs Two Stage
RPN(区域生成网络)
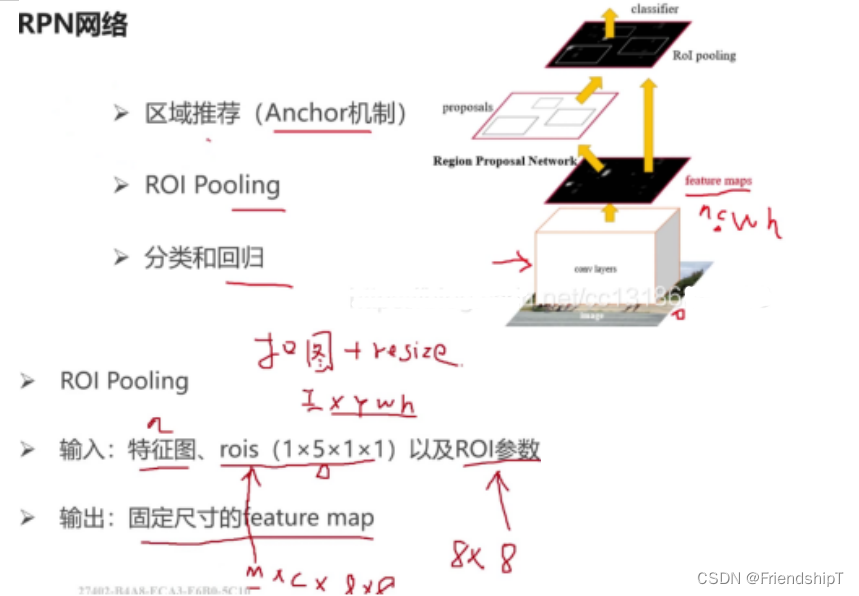
Roi: 抠图+resize(固定同样尺寸大小)
RPN(Region Proposal Network)网络结构
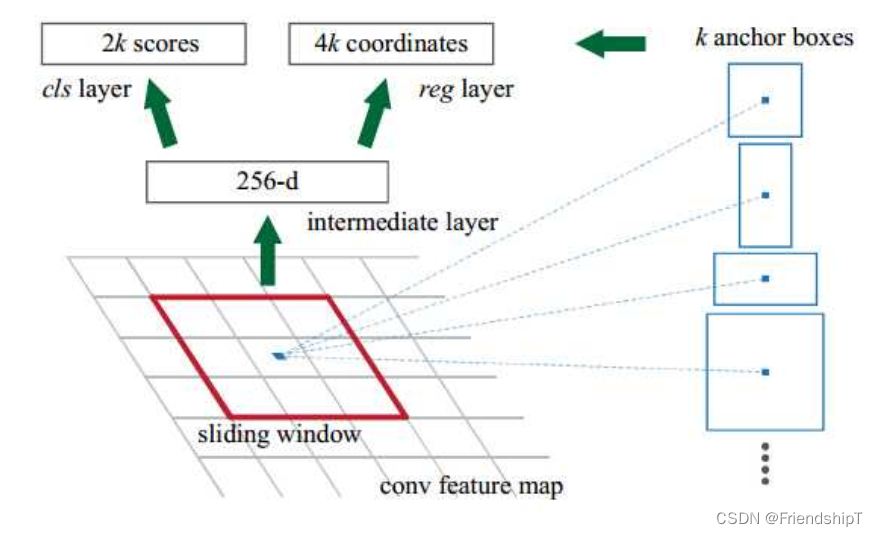
生成anchors -> softmax分类器提取positvie anchors -> bbox reg回归positive anchors -> Proposal Layer生成proposals
RPN 执行两种不同类型的预测:二进制分类和边框回归调整。为了训练,我们把所有的锚 anchor box 分成两类。
一类是「前景」,它与真实目标重叠并且其 IoU值大于 0.5;
另一类是「背景」,它不与任何真实目标重叠或与真实目标的 IoU 值 小于 0.1。
MTCNN
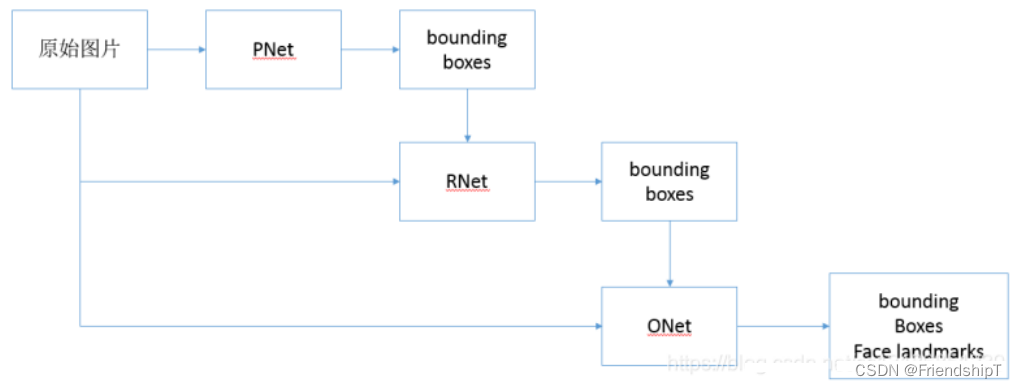
流程:
图片经过Pnet,会得到feature map,通过分类、NMS筛选掉大部分假的候选;
然后剩余候选去原图crop图片输入Rnet,再对Rnet的输出筛选掉False、NMS去掉众多的候选;
剩余候选再去原图crop出图片再输入到Onet,这个时候就能够输出准确的bbox、landmark坐标了。
1.由原始图片和PNet生成预测的bounding boxes。
2.输入原始图片和PNet生成的bounding box,通过RNet,生成校正后的bounding box。
3.输入元素图片和RNet生成的bounding box,通过ONet,生成校正后的bounding box和人脸面部轮廓关键点。
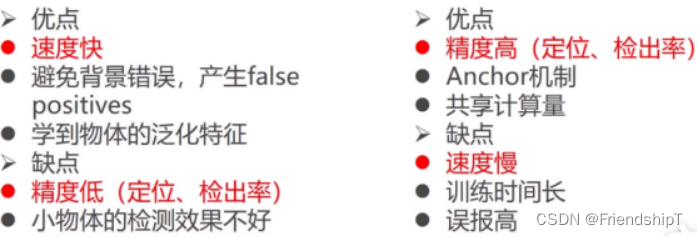
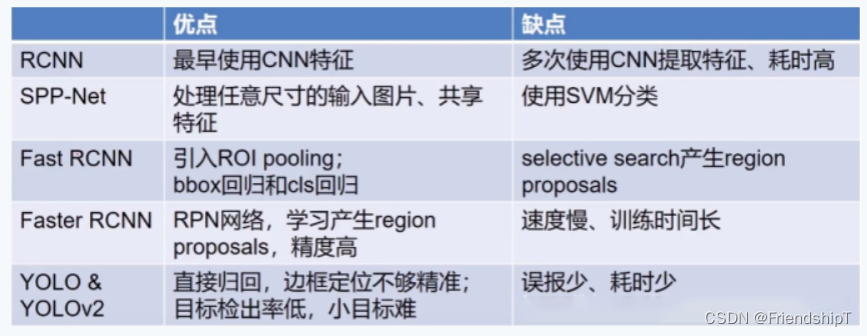
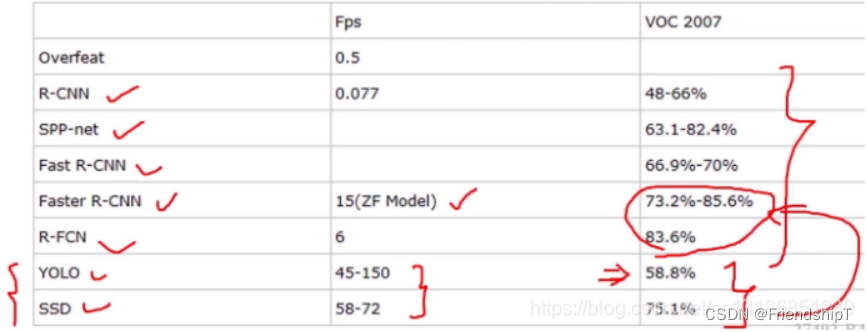
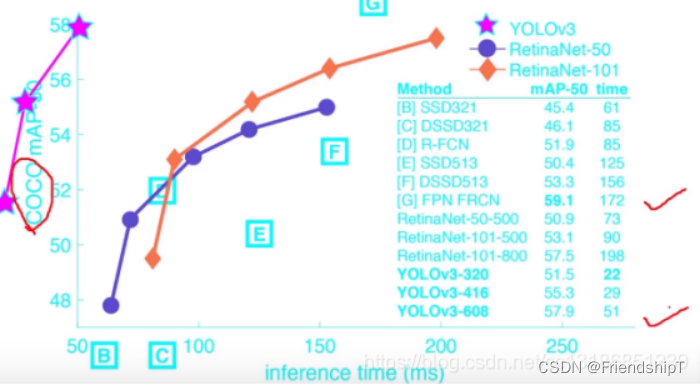
算法的比较
优缺点
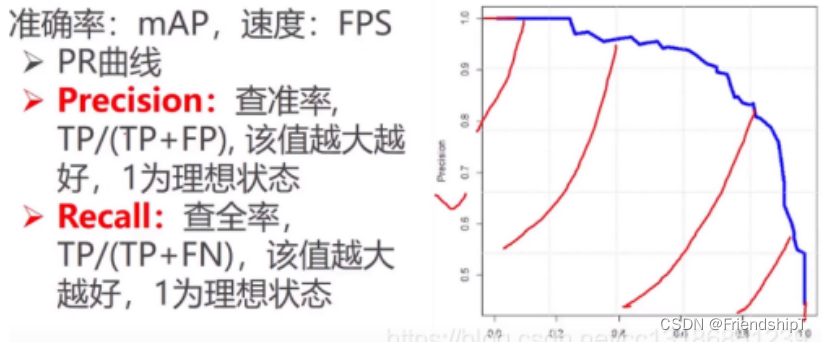
性能评价指标
AP是在单个类别下的,mAP是AP值在所有类别下的均值;
mAP 针对的就是类识别准确率,但是在目标检测任务中还有一个边框回归任务,框的准确率一般用交并比来IoU 衡量:

人脸检测相关问题
目前主要有人脸检测方法分类?
主要包含两个区域:传统人脸检测算法和基于深度学习的人脸检测算法。
传统人脸检测算法主要可以分为4类: 基于知识、模型、特征和外观的人脸检测方法;
基于级联CNN的人脸检测(cascade cnn)、 基于多任务CNN的人脸检测(MTCNN)、Facebox等,很大程度上提高了人脸检测的鲁棒性。
当然通用目标检测算法像Faster-rcnn、yolo、ssd等也有用在人脸检测领域,也可以实现比较不错的结果,但是和专门人脸检测算法比还是有差别。
如何检测图片中不同大小的人脸?
传统人脸检测算法的策略:
(1)缩放图片的大小(2)缩放滑动窗的大小
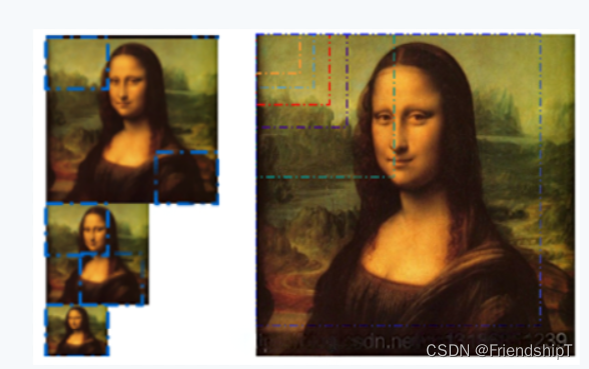
基于深度学习的人脸检测算法的策略:
(1)缩放图片大小。(也可以通过缩放滑动窗的方式,基于深度学习的滑动窗人脸检测方式效率会很慢存在多次重复卷积,所以要采用全卷积神经网络(FCN),用FCN将不能用滑动窗的方法。)
(2)通过anchor box的方法(通过特征图预测原图的anchor box区域)。
如何设定算法检测最小人脸尺寸?
主要是看滑动窗的最小窗口和anchorbox的最小窗口。
(1)滑动窗的方法
假设通过12×12的滑动窗,不对原图做缩放的话,就可以检测原图中12×12的最小人脸。但是往往通常给定最小人脸a=40、或者a=80,以这么大的输入训练CNN进行人脸检测不太现实,速度会很慢,并且下一次需求最小人脸a=30*30又要去重新训练,通常还会是12×12的输入,为满足最小人脸框a,只需要在检测的时候对原图进行缩放即可:w=w×12/a。
(2)anchorbox的方法
原理类似,这里主要看anchorbox的最小box,可以通过缩放输入图片实现最小人脸的设定。
如何定位人脸的位置?
1)滑动窗的方式:基于分类器识别为人脸的框的位置确定最终的人脸;
2)FCN的方式
通过特征图映射到原图的方式确定最终识别为人脸的位置,特征图映射到原图人脸框是要看特征图相比较于原图有多少次缩放(缩放主要查看卷积的步长和池化层)
3)通过anchor box的方式:
通过特征图映射到图的窗口,通过特征图映射到原图到多个框的方式确定最终识别为人脸的位置。

滑动窗的方式
如何通过一个人脸的多个框确定最终人脸框位置?
通过NMS得到最终的人脸位置:
NMS改进版本有很多,最原始的NMS就是判断两个框的交集,如果交集大于设定的阈值,将删除其中一个框,那么两个框应该怎么选择删除哪一个呢? 因为模型输出有概率值,一般会优选选择概率小的框删除。
如何理解端到端?
就是输入一张图像,直接可以给出检测结果,中间不需要你进行任何操作,很方便。非端到端就是不能一步搞定的,需要分步进行。RCNN就是典型的非端到端的例子,一张图过来,首先需要利用SS等方法提取Region Proposals,然后送入到神经网络提取特征,最后还要利用SVM分类,不能一步到位。
目标检测技巧有哪些?
1.数据增强:随机翻转、随机裁剪、添加噪声等也
2.多尺度训练/测试
通过输入更大、更多尺寸的图片进行训练,能够在一定程度上提高检测模型对物体大小的鲁棒性,仅在测试阶段引入多尺度,也可享受大尺寸和多尺寸带来的增益。
3.全局语境
把整张图片作为一个RoI,对其进行RoI Pooling并将得到的feature vector拼接于每个RoI的feature vector上,作为一种辅助信息传入之后的R-CNN子网络。
4.预测框微调/投票法
微调法最初是在SS算法得到的Region Proposal基础上用检测头部进行多次迭代得到一系列box,在ResNet的工作中,作者将输入R-CNN子网络的Region Proposal和R-CNN子网络得到的预测框共同进行NMS(见下面小节)后处理,
最后,把跟NMS筛选所得预测框的IoU超过一定阈值的预测框进行按其分数加权的平均,得到最后的预测结果。投票法可以理解为以顶尖筛选出一流,再用一流的结果进行加权投票决策。
5.随机权值平均(SWA)
只需快速集合集成的一小部分算力,就可以接近其表现。SWA 可以用在任意架构和数据集上,都会有不错的表现
6.OHEM(在线难例挖掘)
两阶段检测模型中,提出的RoI Proposal在输入R-CNN子网络前,我们有机会对正负样本(背景类和前景类)的比例进行调整。通常,背景类的RoI Proposal个数要远远多于前景类,Fast R-CNN的处理方式是随机对两种样本进行上采样和下采样,以使每一batch的正负样本比例保持在1:3,这一做法缓解了类别比例不均衡的问题,是两阶段方法相比单阶段方法具有优势的地方,也被后来的大多数工作沿用。
7.Soft NMS(软化非极大抑制)
用于去除重合度(IoU)较高的预测框,只保留预测分数最高的预测框作为检测输出
8.RoI对齐
采用双线性插值的方法将RoI的表示精细化,并带来了较为明显的性能提升
分类、目标检测、语义分割、实例分割的区别
做目标检测的话,数据集用什么?
COCO上训练好的模型fine tune。
PASCALVOC数据集: 有VOC2007和VOC2012两个数据集,类别仅20个,被看成目标检测方向的一个基准数据集。
COCO数据集:包含80个类别
ImageNet数据集
用自己的数据集做目标检测,在采集数据时应注意哪些问题?
1.首先可以找一些公开的数据集比如VOC数据集,先跑通实验,能训练和测试成功。确保数据和算法是没有问题的。
2.其次,制作你的数据集,看是否可以训练成功,然后再去仔细分析测试的结果,去调优。
3.阅读代码和实现原理,然后去通过调整代码去对算法做一些改进,然后看精度是否有提升。
- 由于本人水平有限,难免出现错漏,敬请批评改正。
- 更多精彩内容,可点击进入人工智能知识点
专栏、Python日常小操作专栏、OpenCV-Python小应用专栏、YOLO系列专栏、自然语言处理专栏或我的个人主页查看- 基于DETR的人脸伪装检测
- YOLOv7训练自己的数据集(口罩检测)
- YOLOv8训练自己的数据集(足球检测)
- YOLOv5:TensorRT加速YOLOv5模型推理
- YOLOv5:IoU、GIoU、DIoU、CIoU、EIoU
- 玩转Jetson Nano(五):TensorRT加速YOLOv5目标检测
- YOLOv5:添加SE、CBAM、CoordAtt、ECA注意力机制
- YOLOv5:yolov5s.yaml配置文件解读、增加小目标检测层
- Python将COCO格式实例分割数据集转换为YOLO格式实例分割数据集
- YOLOv5:使用7.0版本训练自己的实例分割模型(车辆、行人、路标、车道线等实例分割)
- 使用Kaggle GPU资源免费体验Stable Diffusion开源项目

