
- 1如何通过 4 种方式在 Mac 上恢复未保存的 Excel 文件_mac excel忘记保存怎么找回
- 2【自注意力机制必学】BERT类预训练语言模型(含Python实例)_bert预训练
- 3基于深度学习的人脸识别_基于深度学习的小黄脸识别
- 4如何使用AI写作扩写文章?看完这篇学会扩写_ai扩写
- 5【Java练习】-----基础(2)_自定义四个对象,添加到集合并遍历
- 6nltk扩展包下载慢解决办法_nltk.download('punkt')很慢
- 7安装Python模块_对于windows用户,本指南中的示例假定在安装python时选择了调整系统path环境变量的
- 8计算机毕业设计PySpark+Hadoop地震预测系统 地震数据分析可视化 地震爬虫 大数据毕业设计 Flink Hadoop 深度学习 机器学习 人工智能 知识图谱 大数据毕业设计_基于python的全球地震信息数据可视化分析平台研究技术可行性
- 9以太坊DAPP[3]-×××-react特性与×××合约实例
- 10C#执行mysql存储过程报Fatal error encountered during command execution
浅谈机器人控制与仿真设计----RDS和ROS_rds机器人调度系统
赞
踩
机器人控制、仿真或实验,主要由三个部分组成,机器人、环境和算法。
当然各部分又包含很多子部分和功能,这里主要以仿真为主,为了使得仿真结果能够直接应用到实际机器人上,这里分别以RDS和ROS对比介绍。http://download.csdn.net/detail/zhangrelay/9629847
1 机器人
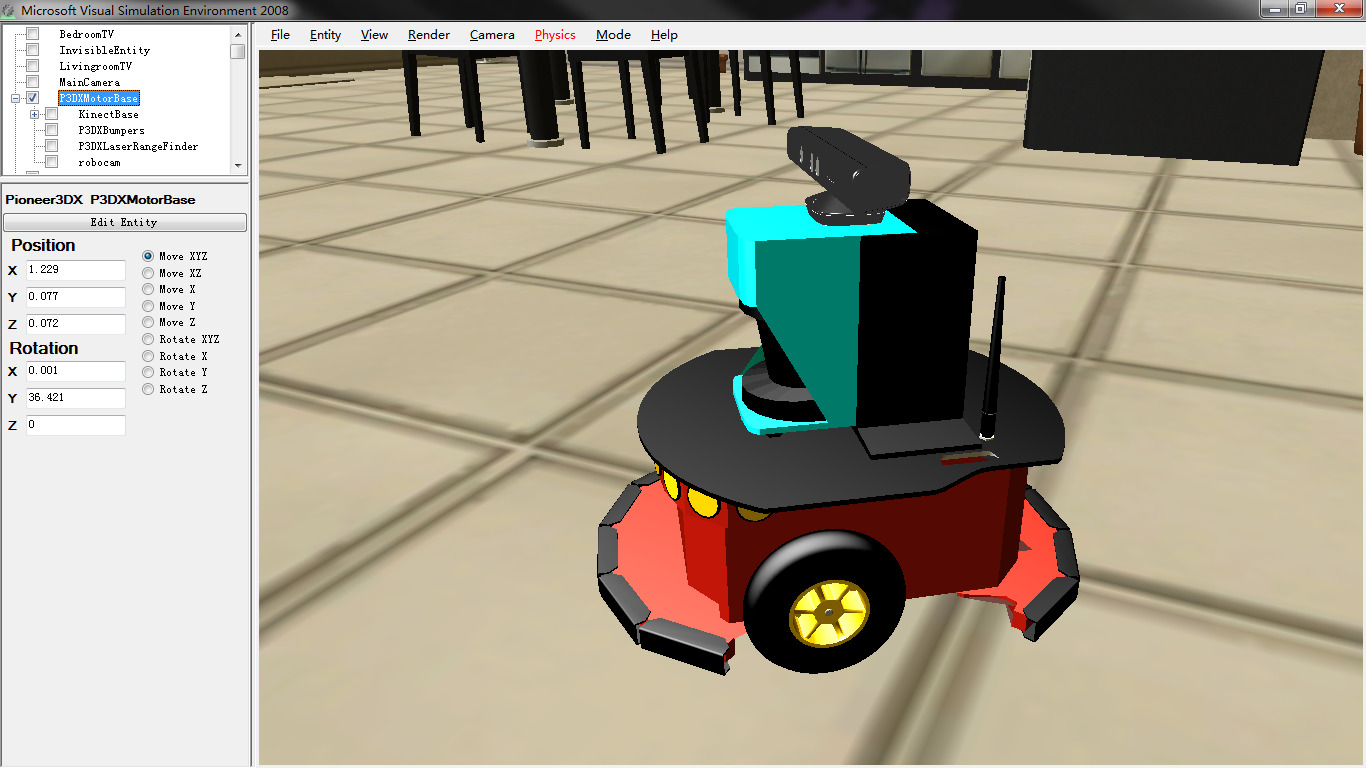
机器人的控制算法主要基于运动学或动力学设计,使机器人在环境中以期望速度或轨迹运动,当然要避障,这与环境相关,放在第二部分。机器人装备传感器感知环境,由算法做出决策,发送到运动执行机构,在加入学习能力之后,可以依据环境做出有利于自身的动态调整,以便于更好的适应环境和完成任务。
RDS:
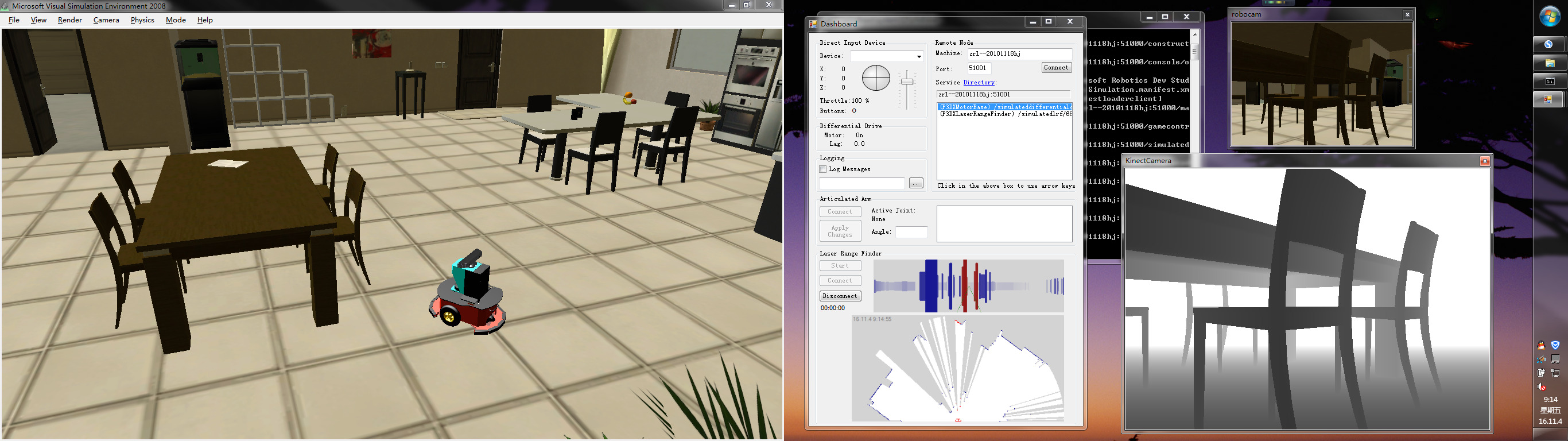
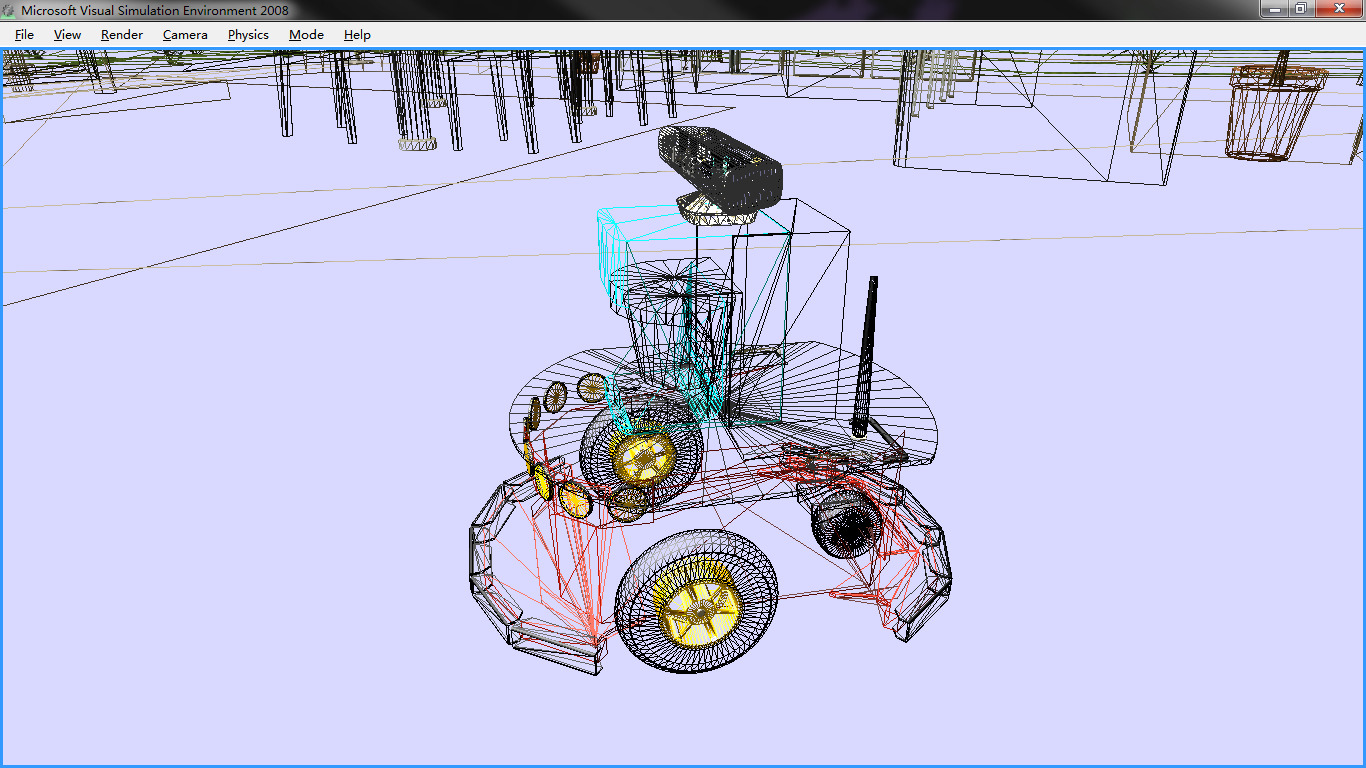
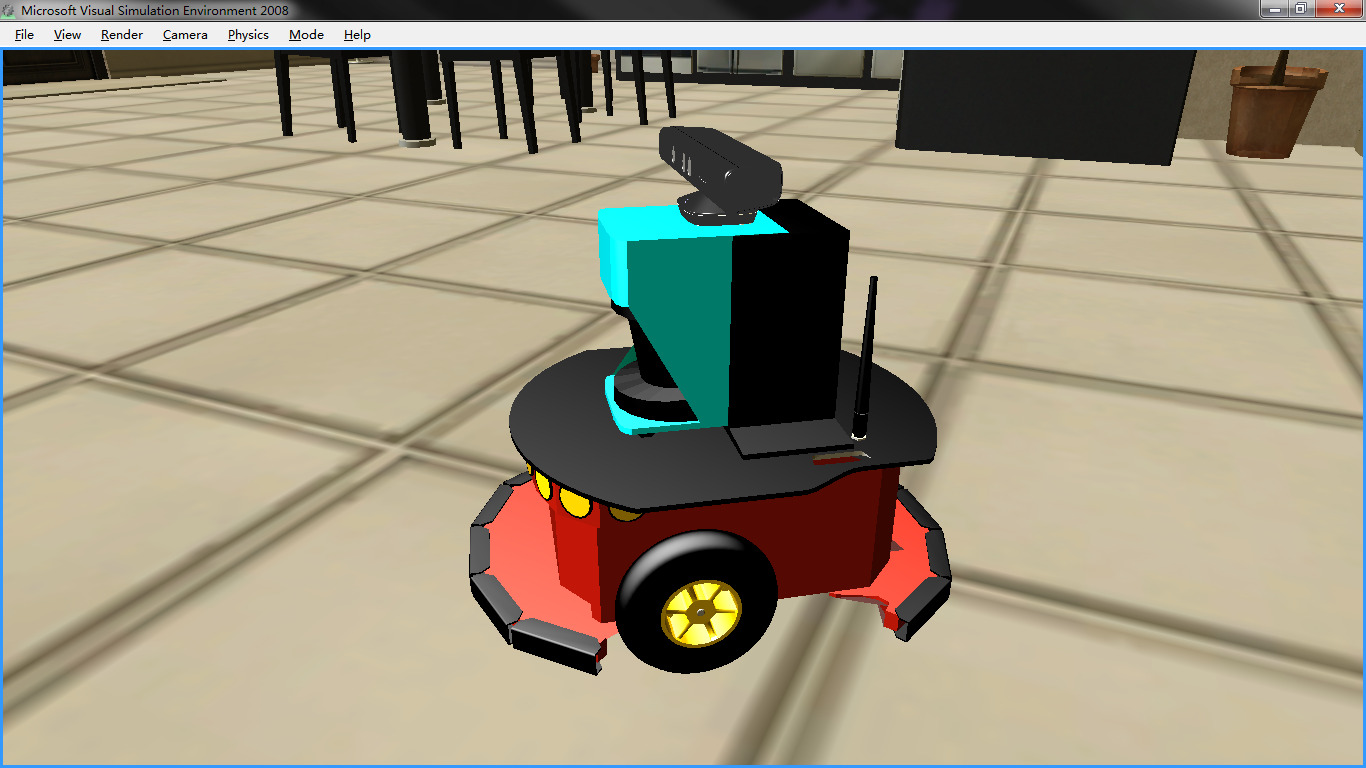
以P3DX为例:
配置代码如下:
- <?xml version="1.0"?>
- <Manifest xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:xsd="http://www.w3.org/2001/XMLSchema" xmlns="http://schemas.microsoft.com/xw/2004/10/manifest.html">
- <CreateServiceList>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/2006/04/simulationengine.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Contract>http://schemas.microsoft.com/robotics/2006/04/simulationengine.html</Contract>
- <Service>P3DX.xml</Service>
- <PartnerList />
- <Name>StateService</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulateddifferentialdrive.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/P3DXMotorBase</Service>
- <PartnerList />
- <Name xmlns:q1="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q1:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedlrf.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/P3DXLaserRangeFinder</Service>
- <PartnerList />
- <Name xmlns:q2="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q2:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedbumper.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/P3DXBumpers</Service>
- <PartnerList />
- <Name xmlns:q3="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q3:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/2006/09/simulatedwebcam.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/robocam</Service>
- <PartnerList />
- <Name xmlns:q4="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q4:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/KinectCamera</Service>
- <PartnerList />
- <Name xmlns:q5="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q5:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- <ServiceRecordType>
- <Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/2011/01/simulatedwebcamsensor.html</Contract>
- <PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
- <Partner>
- <Service>http://localhost/SimulatedWebcam</Service>
- <PartnerList />
- <Name xmlns:q6="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q6:Entity</Name>
- </Partner>
- </PartnerList>
- </ServiceRecordType>
- </CreateServiceList>
- </Manifest>

完整版本配置如下:
- <Pioneer3DX xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXMotorBase</sim:Name>
- <sim:Assets>
- <sim:Mesh>Pioneer3dx.bos</sim:Mesh>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>2</physm:X>
- <physm:Y>0.077099</physm:Y>
- <physm:Z>2</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>2.0103019E-07</physm:Y>
- <physm:Z>-7.260728E-10</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>-3.3154862E-07</physm:X>
- <physm:Y>1.32271339E-07</physm:Y>
- <physm:Z>-3.06670131E-07</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-4.037088E-06</physm:X>
- <physm:Y>-5.273405E-06</physm:Y>
- <physm:Z>9.124161E-06</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>11</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>4</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulateddifferentialdrive.html</ServiceContract>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsEnabled>true</IsEnabled>
- <MotorTorqueScaling>20</MotorTorqueScaling>
- <RightWheel>
- <sim:State>
- <sim:Name>P3DXMotorBase:Right wheel</sim:Name>
- <sim:Assets>
- <sim:Mesh>PioneerWheel.bos</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>2</physm:X>
- <physm:Y>0.077099</physm:Y>
- <physm:Z>2</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>2.0103019E-07</physm:Y>
- <physm:Z>-7.260728E-10</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>180</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <WheelShape>
- <phys:WheelState>
- <phys:Name>P3DXMotorBase/front right wheel</phys:Name>
- <phys:ShapeId>Wheel</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.08</phys:Radius>
- <phys:Material>
- <phys:Name>default wheel material</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>0</phys:DynamicFriction>
- <phys:StaticFriction>0</phys:StaticFriction>
- <phys:MaterialIndex>497</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0.1565</physm:X>
- <physm:Y>0.08</physm:Y>
- <physm:Z>-0.05</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.842458248</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0.5387616</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- <phys:InnerRadius>0.055999998</phys:InnerRadius>
- <phys:SuspensionTravel>0</phys:SuspensionTravel>
- <phys:Flags>OverrideAxleSpeed</phys:Flags>
- <phys:AxleSpeed>0</phys:AxleSpeed>
- <phys:BrakeTorque>0</phys:BrakeTorque>
- </phys:WheelState>
- </WheelShape>
- <Rotations>-8.31889248</Rotations>
- </RightWheel>
- <LeftWheel>
- <sim:State>
- <sim:Name>P3DXMotorBase:Left wheel</sim:Name>
- <sim:Assets>
- <sim:Mesh>PioneerWheel.bos</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>2</physm:X>
- <physm:Y>0.077099</physm:Y>
- <physm:Z>2</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>2.0103019E-07</physm:Y>
- <physm:Z>-7.260728E-10</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <WheelShape>
- <phys:WheelState>
- <phys:Name>P3DXMotorBase/front left wheel</phys:Name>
- <phys:ShapeId>Wheel</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.08</phys:Radius>
- <phys:Material>
- <phys:Name>default wheel material</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>0</phys:DynamicFriction>
- <phys:StaticFriction>0</phys:StaticFriction>
- <phys:MaterialIndex>496</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>-0.1565</physm:X>
- <physm:Y>0.08</physm:Y>
- <physm:Z>-0.05</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.999986649</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0.00517276628</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- <phys:InnerRadius>0.055999998</phys:InnerRadius>
- <phys:SuspensionTravel>0</phys:SuspensionTravel>
- <phys:Flags>OverrideAxleSpeed</phys:Flags>
- <phys:AxleSpeed>0</phys:AxleSpeed>
- <phys:BrakeTorque>0</phys:BrakeTorque>
- </phys:WheelState>
- </WheelShape>
- <Rotations>7.50164652</Rotations>
- </LeftWheel>
- <ChassisShape>
- <phys:BoxState>
- <phys:Name>P3DXMotorBase/Chassis</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.393</physm:X>
- <physm:Y>0.18</physm:Y>
- <physm:Z>0.4</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>high friction</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>1</phys:DynamicFriction>
- <phys:StaticFriction>20</phys:StaticFriction>
- <phys:MaterialIndex>495</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>9</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.14</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>-1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.8</physm:X>
- <physm:Y>0.25</physm:Y>
- <physm:Z>0.25</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </ChassisShape>
- <CasterWheelShape>
- <phys:SphereState>
- <phys:Name>P3DXMotorBase/Caster wheel</phys:Name>
- <phys:ShapeId>Sphere</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.025</phys:Radius>
- <phys:Material>
- <phys:Name>small friction with anisotropy</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.5</phys:DynamicFriction>
- <phys:StaticFriction>1</phys:StaticFriction>
- <phys:MaterialIndex>494</phys:MaterialIndex>
- <phys:Advanced>
- <phys:AnisotropicStaticFriction>0.4</phys:AnisotropicStaticFriction>
- <phys:AnisotropicDynamicFriction>0.3</phys:AnisotropicDynamicFriction>
- <phys:AnisotropyDirection>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>1</physm:Z>
- </phys:AnisotropyDirection>
- <phys:RestitutionCombineMode>Unspecified</phys:RestitutionCombineMode>
- <phys:FrictionCombineMode>Unspecified</phys:FrictionCombineMode>
- <phys:Optical />
- </phys:Advanced>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>2</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.025</physm:Y>
- <physm:Z>0.175</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>-1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:SphereState>
- </CasterWheelShape>
- <RotateDegreesAngleThreshold>0</RotateDegreesAngleThreshold>
- <TimeoutSeconds>0</TimeoutSeconds>
- </Pioneer3DX>
- <LaserRangeFinderEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXLaserRangeFinder</sim:Name>
- <sim:Assets>
- <sim:Effect>LaserRangeFinder.fx</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>2.00002766</physm:X>
- <physm:Y>0.07709907</physm:Y>
- <physm:Z>1.99996006</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>6.653897E-05</physm:X>
- <physm:Y>-7.617568E-06</physm:Y>
- <physm:Z>4.62663738E-05</physm:Z>
- <physm:W>0.99999994</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>3.78771038E-05</physm:X>
- <physm:Y>1.78447647E-06</physm:Y>
- <physm:Z>-1.496551E-05</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-0.000238511231</physm:X>
- <physm:Y>-9.99704062E-05</physm:Y>
- <physm:Z>-0.0008120631</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>UsesAlphaBlending DisableViewFrustumCulling</Flags>
- <ChildCount>0</ChildCount>
- <ParentJoint>
- <physm:State>
- <physm:Name>P3DXLaserRangeFinder's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>-1.07012754E-08</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.02300222E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>1.07013234E-08</physm:Y>
- <physm:Z>-4.762509E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>-7.048179E-14</physm:X>
- <physm:Y>1.51396393E-16</physm:Y>
- <physm:Z>-1.47992978E-08</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedlrf.html</ServiceContract>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <LaserBox>
- <phys:BoxState>
- <phys:Name>P3DXLaserRangeFinder/SickLRF</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.15</physm:X>
- <physm:Y>0.2</physm:Y>
- <physm:Z>0.18</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.3</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.25</physm:X>
- <physm:Y>0.25</physm:Y>
- <physm:Z>0.8</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </LaserBox>
- <ImpactPointEffect>LaserRangeFinder.fx</ImpactPointEffect>
- </LaserRangeFinderEntity>
- <BumperArrayEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXBumpers</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>2.00000525</physm:X>
- <physm:Y>0.077099</physm:Y>
- <physm:Z>1.99999082</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>9.216944E-05</physm:X>
- <physm:Y>6.625781E-05</physm:Y>
- <physm:Z>5.34090141E-05</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>-8.161184E-08</physm:X>
- <physm:Y>-4.97797E-08</physm:Y>
- <physm:Z>-1.62110337E-06</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>3.628642E-07</physm:X>
- <physm:Y>2.53038923E-08</physm:Y>
- <physm:Z>8.441286E-07</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.002</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>DisableRendering</Flags>
- <ChildCount>0</ChildCount>
- <ParentJoint>
- <physm:State>
- <physm:Name>P3DXBumpers's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedbumper.html</ServiceContract>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <Shapes>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>/P3DXBumpers/front</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.4</physm:X>
- <physm:Y>0.03</physm:Y>
- <physm:Z>0.03</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.05</physm:Y>
- <physm:Z>-0.25</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.1</physm:X>
- <physm:Y>0.1</physm:Y>
- <physm:Z>0.1</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>true</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>/P3DXBumpers/rear</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.4</physm:X>
- <physm:Y>0.03</physm:Y>
- <physm:Z>0.03</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.05</physm:Y>
- <physm:Z>0.25</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.1</physm:X>
- <physm:Y>0.1</physm:Y>
- <physm:Z>0.1</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>true</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </Shapes>
- </BumperArrayEntity>
- <CameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>robocam</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>NotSet</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/2006/09/simulatedwebcam.html</ServiceContract>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera>true</IsRealTimeCamera>
- <UpdateInterval>50</UpdateInterval>
- <ShadowDisplay>ShowShadows</ShadowDisplay>
- <CameraModel>AttachedChild</CameraModel>
- <Near>0</Near>
- <Far>0</Far>
- <ViewSizeX>320</ViewSizeX>
- <ViewSizeY>240</ViewSizeY>
- <ViewAngle>0.7853982</ViewAngle>
- <IsPhysicsVisible>false</IsPhysicsVisible>
- <LookAt>
- <X>0</X>
- <Y>0</Y>
- <Z>1</Z>
- </LookAt>
- <Location>
- <X>0</X>
- <Y>0</Y>
- <Z>0</Z>
- </Location>
- </CameraEntity>
- <KinectBaseEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html">
- <sim:State>
- <sim:Name>KinectBase</sim:Name>
- <sim:Assets>
- <sim:Mesh>kinectbase.obj</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.999773</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>2.00281787</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>7.98663241E-05</physm:X>
- <physm:Y>-0.0007520462</physm:Y>
- <physm:Z>8.008059E-05</physm:Z>
- <physm:W>0.999999762</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0.0002449537</physm:X>
- <physm:Y>-6.49874528E-06</physm:Y>
- <physm:Z>5.659733E-06</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-0.00132568076</physm:X>
- <physm:Y>-0.00055813574</physm:Y>
- <physm:Z>-0.00496417144</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">None</Flags>
- <ChildCount xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">1</ChildCount>
- <ParentJoint>
- <physm:State>
- <physm:Name>KinectBase's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>0</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>-1</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-8.742278E-08</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>0</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>-1</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-8.742278E-08</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">Global</ReferenceFrame>
- <EmbeddedResourceAssemblies xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html" />
- <MeshScale xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0.01</physm:X>
- <physm:Y>0.01</physm:Y>
- <physm:Z>0.01</physm:Z>
- </MeshScale>
- <MeshRotation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>180</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>-0.01</physm:Y>
- <physm:Z>-0.01</physm:Z>
- </MeshTranslation>
- <BoxShape xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <phys:BoxState>
- <phys:Name>KinectBase</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.07</physm:X>
- <physm:Y>0.02</physm:Y>
- <physm:Z>0.07</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>_default</phys:Name>
- <phys:Restitution>0.2</phys:Restitution>
- <phys:DynamicFriction>0.5</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>500</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </KinectBaseEntity>
- <KinectEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html">
- <sim:State>
- <sim:Name>KinectCameraBody</sim:Name>
- <sim:Assets>
- <sim:Mesh>kinectcamera.obj</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.99977434</physm:X>
- <physm:Y>0.5261083</physm:Y>
- <physm:Z>2.00283051</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.000100729529</physm:X>
- <physm:Y>-0.0008877627</physm:Y>
- <physm:Z>-6.13355442E-05</physm:Z>
- <physm:W>0.9999996</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0.000443562341</physm:X>
- <physm:Y>-6.480528E-06</physm:Y>
- <physm:Z>-4.738063E-05</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-0.00148144015</physm:X>
- <physm:Y>-0.0005586805</physm:Y>
- <physm:Z>-0.00250816648</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.01</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">None</Flags>
- <ChildCount xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">2</ChildCount>
- <ParentJoint xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:State>
- <physm:Name>KinectCameraBody's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>0.000194720807</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>4.209584E-05</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-0.000194722234</physm:Y>
- <physm:Z>3.41068226E-05</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.940038E-06</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>-6.466127E-05</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.943276E-06</physm:Y>
- <physm:Z>-5.02041075E-05</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>-6.98267533E-09</physm:X>
- <physm:Y>-0.0400096923</physm:Y>
- <physm:Z>-1.90036553E-06</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">Global</ReferenceFrame>
- <EmbeddedResourceAssemblies xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html" />
- <MeshScale xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0.01</physm:X>
- <physm:Y>0.01</physm:Y>
- <physm:Z>0.01</physm:Z>
- </MeshScale>
- <MeshRotation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>180</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-0.01</physm:Z>
- </MeshTranslation>
- <BoxShape xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <phys:BoxState>
- <phys:Name>KinectCameraBody</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.25</physm:X>
- <physm:Y>0.045</physm:Y>
- <physm:Z>0.07</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>_default</phys:Name>
- <phys:Restitution>0.2</phys:Restitution>
- <phys:DynamicFriction>0.5</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>501</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.01</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </KinectEntity>
- <DepthCameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html">
- <sim:State>
- <sim:Name>KinectCamera</sim:Name>
- <sim:Assets />
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-0.029</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>8.72664643E-08</physm:X>
- <physm:Y>8.72664643E-08</physm:Y>
- <physm:Z>8.726645E-08</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">None</Flags>
- <ChildCount xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">0</ChildCount>
- <ReferenceFrame xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">Local</ReferenceFrame>
- <ServiceContract xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html</ServiceContract>
- <EmbeddedResourceAssemblies xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html" />
- <MeshScale xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">true</IsRealTimeCamera>
- <UpdateInterval xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">67</UpdateInterval>
- <ShadowDisplay xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">ShowShadows</ShadowDisplay>
- <CameraModel xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">FirstPerson</CameraModel>
- <Near xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">5E-05</Near>
- <Far xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">12</Far>
- <ViewSizeX xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">640</ViewSizeX>
- <ViewSizeY xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">480</ViewSizeY>
- <ViewAngle xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">0.780699968</ViewAngle>
- <IsPhysicsVisible xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">false</IsPhysicsVisible>
- <LookAt xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <X>2</X>
- <Y>0.53</Y>
- <Z>0.71</Z>
- </LookAt>
- <Location xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <X>2</X>
- <Y>0.53</Y>
- <Z>1.71</Z>
- </Location>
- <DepthRange>4</DepthRange>
- </DepthCameraEntity>
- <CameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>SimulatedWebcam</sim:Name>
- <sim:Assets />
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-0.029</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>8.72664643E-08</physm:X>
- <physm:Y>8.72664643E-08</physm:Y>
- <physm:Z>8.726645E-08</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Local</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/2011/01/simulatedwebcamsensor.html</ServiceContract>
- <EmbeddedResourceAssemblies />
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera>true</IsRealTimeCamera>
- <UpdateInterval>67</UpdateInterval>
- <ShadowDisplay>ShowShadows</ShadowDisplay>
- <CameraModel>FirstPerson</CameraModel>
- <Near>0.001</Near>
- <Far>50</Far>
- <ViewSizeX>640</ViewSizeX>
- <ViewSizeY>480</ViewSizeY>
- <ViewAngle>0.780699968</ViewAngle>
- <IsPhysicsVisible>false</IsPhysicsVisible>
- <LookAt>
- <X>2</X>
- <Y>0.53</Y>
- <Z>0.97</Z>
- </LookAt>
- <Location>
- <X>2</X>
- <Y>0.53</Y>
- <Z>1.97</Z>
- </Location>
- </CameraEntity>
- <PursuitCameraEntity xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns="http://schemas.microsoft.com/robotics/entity/2008/04/pursuitcamera.html">
- <sim:State>
- <sim:Name>PursuitCamera</sim:Name>
- <sim:Assets />
- <sim:Pose>
- <physm:Position>
- <physm:X>3.34445143</physm:X>
- <physm:Y>2.002601</physm:Y>
- <physm:Z>9.239522</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-0.00700437</physm:X>
- <physm:Y>0.9677629</physm:Y>
- <physm:Z>0.2503048</physm:Z>
- <physm:W>0.02708126</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- <phys:MassLocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:MassLocalPose>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">None</Flags>
- <ChildCount xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">0</ChildCount>
- <ReferenceFrame xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">Global</ReferenceFrame>
- <MeshScale xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">false</IsRealTimeCamera>
- <UpdateInterval xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">67</UpdateInterval>
- <ShadowDisplay xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">ShowShadows</ShadowDisplay>
- <CameraModel xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">FirstPerson</CameraModel>
- <Near xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">0.1</Near>
- <Far xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">5000</Far>
- <ViewSizeX xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">800</ViewSizeX>
- <ViewSizeY xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">600</ViewSizeY>
- <ViewAngle xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">0.7853982</ViewAngle>
- <IsPhysicsVisible xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">false</IsPhysicsVisible>
- <LookAt xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <X>3.14</X>
- <Y>0</Y>
- <Z>12.84</Z>
- </LookAt>
- <Location xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <X>3.34</X>
- <Y>2</Y>
- <Z>9.24</Z>
- </Location>
- <TargetName>P3DXMotorBase</TargetName>
- <MinDistance>4</MinDistance>
- <MaxDistance>6</MaxDistance>
- <Altitude>2</Altitude>
- <PreventOcclusion>true</PreventOcclusion>
- <OcclusionThreshold>0.5</OcclusionThreshold>
- </PursuitCameraEntity>
ROS:
如果用Gazebo进行机器人三维仿真,可以参考:
机器人模型:http://blog.csdn.net/zhangrelay/article/details/52839752
-----------------------------------------------------------------------------
两者其实没有本质区别,逼真的机器人模型可以用blender等三维软件设计然后导入到环境中,这些文件主要用来配置机器人属性,包括位姿等,以及传感器、电机的具体位姿和其他参数等。
2 环境
机器人运动空间中其他对象共同组成的场景,就是机器人的环境。下面以一个简单环境为例:
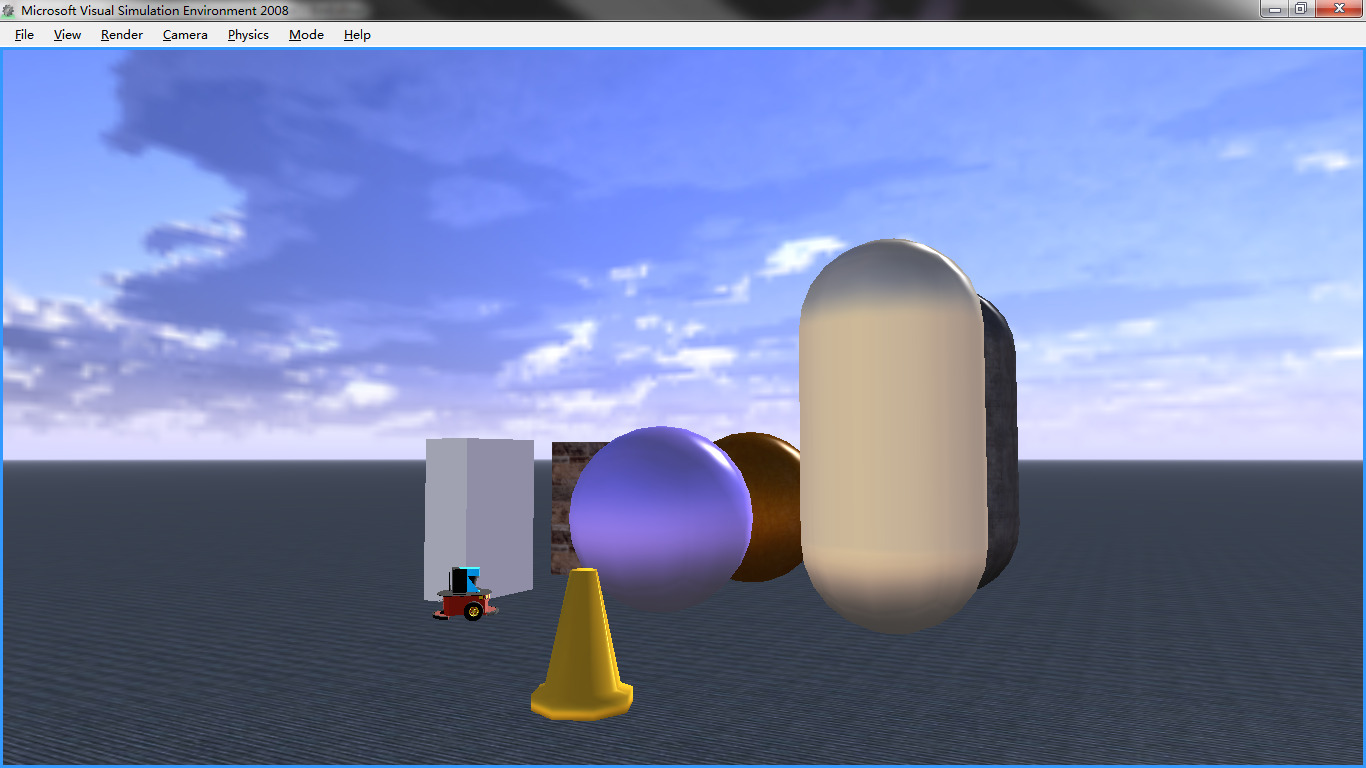
环境中有天空、光源、大地和障碍物等,也包括重力、摩擦力的配置,当然也可以设计更为逼真的起伏地形环境。
具体配置文件如下:
- <?xml version="1.0" encoding="utf-8"?>
- <SimulationState xmlns:s="http://www.w3.org/2003/05/soap-envelope" xmlns:wsa="http://schemas.xmlsoap.org/ws/2004/08/addressing" xmlns:d="http://schemas.microsoft.com/xw/2004/10/dssp.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulation.html">
- <Gravity>
- <X xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">0</X>
- <Y xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">-9.81</Y>
- <Z xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">0</Z>
- </Gravity>
- <RenderMode>Full</RenderMode>
- <FramesPerSecond>62.8144646</FramesPerSecond>
- <Pause>false</Pause>
- <CameraPosition>
- <X xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">1.66</X>
- <Y xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">2.22</Y>
- <Z xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">3.6</Z>
- </CameraPosition>
- <CameraLookAt>
- <X xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">1.2</X>
- <Y xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">1.96</Y>
- <Z xmlns="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html">2.75</Z>
- </CameraLookAt>
- <CameraFieldOfView>0.781</CameraFieldOfView>
- <CameraNearPlane>0.1</CameraNearPlane>
- <CameraFarPlane>5000</CameraFarPlane>
- <Lights />
- <SerializedEntities>
- <LightSourceEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>Sun</sim:Name>
- <sim:Assets />
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-0.04912025</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0.491202474</physm:Z>
- <physm:W>0.8696593</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>DisableRendering</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <Type>Directional</Type>
- <Color>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- <physm:W>1</physm:W>
- </Color>
- <SpotUmbra>90</SpotUmbra>
- <FalloffStart>0</FalloffStart>
- <FalloffEnd>30</FalloffEnd>
- <CastsShadows>false</CastsShadows>
- </LightSourceEntity>
- <CameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>MainCamera</sim:Name>
- <sim:Assets />
- <sim:Pose>
- <physm:Position>
- <physm:X>2.02951932</physm:X>
- <physm:Y>0.5932036</physm:Y>
- <physm:Z>0.571604133</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.115347572</physm:X>
- <physm:Y>-0.524591148</physm:Y>
- <physm:Z>-0.07199961</physm:Z>
- <physm:W>0.840425551</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera>false</IsRealTimeCamera>
- <UpdateInterval>67</UpdateInterval>
- <ShadowDisplay>ShowShadows</ShadowDisplay>
- <CameraModel>FirstPerson</CameraModel>
- <Near>0.1</Near>
- <Far>5000</Far>
- <ViewSizeX>1010</ViewSizeX>
- <ViewSizeY>566</ViewSizeY>
- <ViewAngle>0.781</ViewAngle>
- <IsPhysicsVisible>false</IsPhysicsVisible>
- <LookAt>
- <X>1.16</X>
- <Y>0.32</Y>
- <Z>0.15</Z>
- </LookAt>
- <Location>
- <X>2.03</X>
- <Y>0.59</Y>
- <Z>0.57</Z>
- </Location>
- </CameraEntity>
- <Pioneer3DX xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXMotorBase</sim:Name>
- <sim:Assets>
- <sim:Mesh>Pioneer3dx.bos</sim:Mesh>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.000001</physm:X>
- <physm:Y>-0.001000002</physm:Y>
- <physm:Z>0.000236000444</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-8.578354E-09</physm:X>
- <physm:Y>-2.3919597E-06</physm:Y>
- <physm:Z>2.3672917E-09</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>-2.208526E-09</physm:X>
- <physm:Y>1.24457666E-09</physm:Y>
- <physm:Z>-1.82712565E-08</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>1.14104509E-07</physm:X>
- <physm:Y>-3.471582E-09</physm:Y>
- <physm:Z>2.01171826E-08</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>9.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>3</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulateddifferentialdrive.user.html</ServiceContract>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsEnabled>false</IsEnabled>
- <MotorTorqueScaling>20</MotorTorqueScaling>
- <RightWheel>
- <sim:State>
- <sim:Name>P3DXMotorBase:Right wheel</sim:Name>
- <sim:Assets>
- <sim:Mesh>PioneerWheel.bos</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.000001</physm:X>
- <physm:Y>-0.001000002</physm:Y>
- <physm:Z>0.000236000444</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-8.578354E-09</physm:X>
- <physm:Y>-2.3919597E-06</physm:Y>
- <physm:Z>2.3672917E-09</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>180</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <WheelShape>
- <phys:WheelState>
- <phys:Name>P3DXMotorBase/front right wheel</phys:Name>
- <phys:ShapeId>Wheel</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.08</phys:Radius>
- <phys:Material>
- <phys:Name>default wheel material</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>0</phys:DynamicFriction>
- <phys:StaticFriction>0</phys:StaticFriction>
- <phys:MaterialIndex>5</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0.1565</physm:X>
- <physm:Y>0.08</physm:Y>
- <physm:Z>-0.05</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.873173</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-0</physm:Z>
- <physm:W>-0.487410426</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- <phys:InnerRadius>0.055999998</phys:InnerRadius>
- <phys:SuspensionTravel>0</phys:SuspensionTravel>
- <phys:Flags>OverrideAxleSpeed</phys:Flags>
- <phys:AxleSpeed>0</phys:AxleSpeed>
- <phys:BrakeTorque>0</phys:BrakeTorque>
- </phys:WheelState>
- </WheelShape>
- <Rotations>-0.6620584</Rotations>
- </RightWheel>
- <LeftWheel>
- <sim:State>
- <sim:Name>P3DXMotorBase:Left wheel</sim:Name>
- <sim:Assets>
- <sim:Mesh>PioneerWheel.bos</sim:Mesh>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.000001</physm:X>
- <physm:Y>-0.001000002</physm:Y>
- <physm:Z>0.000236000444</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-8.578354E-09</physm:X>
- <physm:Y>-2.3919597E-06</physm:Y>
- <physm:Z>2.3672917E-09</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <WheelShape>
- <phys:WheelState>
- <phys:Name>P3DXMotorBase/front left wheel</phys:Name>
- <phys:ShapeId>Wheel</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.08</phys:Radius>
- <phys:Material>
- <phys:Name>default wheel material</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>0</phys:DynamicFriction>
- <phys:StaticFriction>0</phys:StaticFriction>
- <phys:MaterialIndex>4</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>-0.1565</physm:X>
- <physm:Y>0.08</physm:Y>
- <physm:Z>-0.05</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0.9306567</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0.3658936</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- <phys:InnerRadius>0.055999998</phys:InnerRadius>
- <phys:SuspensionTravel>0</phys:SuspensionTravel>
- <phys:Flags>OverrideAxleSpeed</phys:Flags>
- <phys:AxleSpeed>0</phys:AxleSpeed>
- <phys:BrakeTorque>0</phys:BrakeTorque>
- </phys:WheelState>
- </WheelShape>
- <Rotations>1.61923659</Rotations>
- </LeftWheel>
- <ChassisShape>
- <phys:BoxState>
- <phys:Name>P3DXMotorBase/Chassis</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.393</physm:X>
- <physm:Y>0.18</physm:Y>
- <physm:Z>0.4</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>high friction</phys:Name>
- <phys:Restitution>0</phys:Restitution>
- <phys:DynamicFriction>1</phys:DynamicFriction>
- <phys:StaticFriction>20</phys:StaticFriction>
- <phys:MaterialIndex>3</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>9</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.14</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>-1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.8</physm:X>
- <physm:Y>0.25</physm:Y>
- <physm:Z>0.25</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </ChassisShape>
- <CasterWheelShape>
- <phys:SphereState>
- <phys:Name>P3DXMotorBase/Caster wheel</phys:Name>
- <phys:ShapeId>Sphere</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.025</phys:Radius>
- <phys:Material>
- <phys:Name>small friction with anisotropy</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.5</phys:DynamicFriction>
- <phys:StaticFriction>1</phys:StaticFriction>
- <phys:MaterialIndex>2</phys:MaterialIndex>
- <phys:Advanced>
- <phys:AnisotropicStaticFriction>0.4</phys:AnisotropicStaticFriction>
- <phys:AnisotropicDynamicFriction>0.3</phys:AnisotropicDynamicFriction>
- <phys:AnisotropyDirection>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>1</physm:Z>
- </phys:AnisotropyDirection>
- <phys:RestitutionCombineMode>Unspecified</phys:RestitutionCombineMode>
- <phys:FrictionCombineMode>Unspecified</phys:FrictionCombineMode>
- <phys:Optical />
- </phys:Advanced>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.025</physm:Y>
- <physm:Z>0.175</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>-1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:SphereState>
- </CasterWheelShape>
- <RotateDegreesAngleThreshold>0</RotateDegreesAngleThreshold>
- <TimeoutSeconds>0</TimeoutSeconds>
- </Pioneer3DX>
- <LaserRangeFinderEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXLaserRangeFinder</sim:Name>
- <sim:Assets>
- <sim:Effect>LaserRangeFinder.fx</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.000001</physm:X>
- <physm:Y>-0.0009999871</physm:Y>
- <physm:Z>0.000236215943</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-3.43086185E-07</physm:X>
- <physm:Y>-2.39392671E-06</physm:Y>
- <physm:Z>-6.05226269E-09</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>-5.849387E-09</physm:X>
- <physm:Y>2.36588562E-08</physm:Y>
- <physm:Z>-4.401973E-08</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-2.53042344E-07</physm:X>
- <physm:Y>2.95466918E-09</physm:Y>
- <physm:Z>3.21068647E-08</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>UsesAlphaBlending DisableViewFrustumCulling</Flags>
- <ChildCount>0</ChildCount>
- <ParentJoint>
- <physm:State>
- <physm:Name>P3DXLaserRangeFinder's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>-1.07012754E-08</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.02300222E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>1.07013234E-08</physm:Y>
- <physm:Z>-4.762509E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>-7.048179E-14</physm:X>
- <physm:Y>1.51396393E-16</physm:Y>
- <physm:Z>-1.47992978E-08</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedlrf.user.html</ServiceContract>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <LaserBox>
- <phys:BoxState>
- <phys:Name>P3DXLaserRangeFinder/SickLRF</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.15</physm:X>
- <physm:Y>0.2</physm:Y>
- <physm:Z>0.18</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.3</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.25</physm:X>
- <physm:Y>0.25</physm:Y>
- <physm:Z>0.8</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </LaserBox>
- <ImpactPointEffect>LaserRangeFinder.fx</ImpactPointEffect>
- </LaserRangeFinderEntity>
- <BumperArrayEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>P3DXBumpers</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>1.000001</physm:X>
- <physm:Y>-0.0009999983</physm:Y>
- <physm:Z>0.000236034088</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-3.45008232E-07</physm:X>
- <physm:Y>-2.39381848E-06</physm:Y>
- <physm:Z>2.8847108E-10</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>1.37185452E-09</physm:X>
- <physm:Y>2.0209038E-08</physm:Y>
- <physm:Z>1.55766546E-08</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>-2.57251E-07</physm:X>
- <physm:Y>2.983444E-09</physm:Y>
- <physm:Z>3.27052057E-08</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.002</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>DisableRendering</Flags>
- <ChildCount>0</ChildCount>
- <ParentJoint>
- <physm:State>
- <physm:Name>P3DXBumpers's parent joint</physm:Name>
- <physm:Connectors>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- <physm:EntityJointConnector>
- <physm:JointNormal>
- <physm:X>1.96775329E-09</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1.40716976E-08</physm:Z>
- </physm:JointNormal>
- <physm:JointAxis>
- <physm:X>1</physm:X>
- <physm:Y>-1.96768624E-09</physm:Y>
- <physm:Z>-4.76237028E-06</physm:Z>
- </physm:JointAxis>
- <physm:JointConnectPoint>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:JointConnectPoint>
- </physm:EntityJointConnector>
- </physm:Connectors>
- <physm:MaximumForce>0</physm:MaximumForce>
- <physm:MaximumTorque>0</physm:MaximumTorque>
- <physm:EnableCollisions>false</physm:EnableCollisions>
- <physm:Projection>
- <physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
- <physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
- <physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
- </physm:Projection>
- </physm:State>
- </ParentJoint>
- <ReferenceFrame>Global</ReferenceFrame>
- <ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedbumper.user.html</ServiceContract>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <Shapes>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>/P3DXBumpers/front</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.4</physm:X>
- <physm:Y>0.03</physm:Y>
- <physm:Z>0.03</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.05</physm:Y>
- <physm:Z>-0.25</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.1</physm:X>
- <physm:Y>0.1</physm:Y>
- <physm:Z>0.1</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>true</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>/P3DXBumpers/rear</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.4</physm:X>
- <physm:Y>0.03</physm:Y>
- <physm:Z>0.03</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.001</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.05</physm:Y>
- <physm:Z>0.25</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.1</physm:X>
- <physm:Y>0.1</physm:Y>
- <physm:Z>0.1</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>true</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </Shapes>
- </BumperArrayEntity>
- <CameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>robocam</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>1</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>NotSet</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <IsRealTimeCamera>true</IsRealTimeCamera>
- <UpdateInterval>50</UpdateInterval>
- <ShadowDisplay>ShowShadows</ShadowDisplay>
- <CameraModel>AttachedChild</CameraModel>
- <Near>0</Near>
- <Far>0</Far>
- <ViewSizeX>320</ViewSizeX>
- <ViewSizeY>240</ViewSizeY>
- <ViewAngle>0.7853982</ViewAngle>
- <IsPhysicsVisible>false</IsPhysicsVisible>
- <LookAt>
- <X>0</X>
- <Y>0</Y>
- <Z>1</Z>
- </LookAt>
- <Location>
- <X>0</X>
- <Y>0</Y>
- <Z>0</Z>
- </Location>
- </CameraEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>texcapsule</sim:Name>
- <sim:Assets>
- <sim:DefaultTexture>cellfloor.jpg</sim:DefaultTexture>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-3.999385</physm:X>
- <physm:Y>1.4989996</physm:Y>
- <physm:Z>-5.00003672</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>2.73118644E-06</physm:X>
- <physm:Y>-1.2975248E-05</physm:Y>
- <physm:Z>-0.0005707066</physm:Z>
- <physm:W>0.9999999</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <CapsuleShape>
- <phys:CapsuleState>
- <phys:Name>texcapsule</phys:Name>
- <phys:ShapeId>Capsule</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>1.6</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.7</phys:Radius>
- <phys:Material>
- <phys:Name>tcaps</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>6</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:CapsuleState>
- </CapsuleShape>
- </SingleShapeEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>texsphere</sim:Name>
- <sim:Assets>
- <sim:DefaultTexture>Wood_cherry.jpg</sim:DefaultTexture>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-4.00028324</physm:X>
- <physm:Y>0.799</physm:Y>
- <physm:Z>-3</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-0.000441151671</physm:Z>
- <physm:W>0.9999999</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <SphereShape>
- <phys:SphereState>
- <phys:Name>texsphere</phys:Name>
- <phys:ShapeId>Sphere</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.8</phys:Radius>
- <phys:Material>
- <phys:Name>tphere</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>6</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:SphereState>
- </SphereShape>
- </SingleShapeEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>goldencapsule</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-1.9997071</physm:X>
- <physm:Y>1.49899924</physm:Y>
- <physm:Z>-5.00003672</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>4.42864348E-06</physm:X>
- <physm:Y>-1.29746923E-05</physm:Y>
- <physm:Z>-0.000857615</physm:Z>
- <physm:W>0.9999999</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <CapsuleShape>
- <phys:CapsuleState>
- <phys:Name>goldencapsule</phys:Name>
- <phys:ShapeId>Capsule</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>1.6</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.7</phys:Radius>
- <phys:Material>
- <phys:Name>gcaps</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>4</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.7</physm:X>
- <physm:Y>0.6</physm:Y>
- <physm:Z>0.4</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:CapsuleState>
- </CapsuleShape>
- </SingleShapeEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>texbox</sim:Name>
- <sim:Assets>
- <sim:DefaultTexture>env2.bmp</sim:DefaultTexture>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-4.0048337</physm:X>
- <physm:Y>0.749</physm:Y>
- <physm:Z>-1.00067735</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>2.22023733E-08</physm:X>
- <physm:Y>5.525874E-05</physm:Y>
- <physm:Z>-3.17256732E-09</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>texbox</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>1</physm:X>
- <physm:Y>1.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>tbox</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>5</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </SingleShapeEntity>
- <SkyEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>Sky</sim:Name>
- <sim:Assets>
- <sim:Effect>SkyBox.fx</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>NotSet</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <VisualTexture>sky.dds</VisualTexture>
- <LightingTexture>sky_diff.dds</LightingTexture>
- <FogColor>
- <physm:Red>0.85</physm:Red>
- <physm:Green>0.85</physm:Green>
- <physm:Blue>1</physm:Blue>
- <physm:Alpha>1</physm:Alpha>
- </FogColor>
- <FogStart>100</FogStart>
- <FogEnd>1000</FogEnd>
- </SkyEntity>
- <HeightFieldEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>ground</sim:Name>
- <sim:Assets>
- <sim:DefaultTexture>03RamieSc.dds</sim:DefaultTexture>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>Ground</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <HeightFieldShape>
- <phys:HeightFieldState>
- <phys:Name>ground/height field</phys:Name>
- <phys:ShapeId>HeightField</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>ground</phys:Name>
- <phys:Restitution>0.8</phys:Restitution>
- <phys:DynamicFriction>0.5</phys:DynamicFriction>
- <phys:StaticFriction>0.8</phys:StaticFriction>
- <phys:MaterialIndex>2</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>0</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>-3200</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-3200</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- <phys:HeightScale>1</phys:HeightScale>
- <phys:RowScale>100</phys:RowScale>
- <phys:ColumnScale>100</phys:ColumnScale>
- <phys:MaterialIndexHigh>0</phys:MaterialIndexHigh>
- <phys:HoleMaterialIndex>0</phys:HoleMaterialIndex>
- <phys:ColumnCount>64</phys:ColumnCount>
- <phys:RowCount>64</phys:RowCount>
- <phys:VerticalExtent>-1000</phys:VerticalExtent>
- <phys:ConvexEdgeThreshold>0</phys:ConvexEdgeThreshold>
- <phys:TextureUScale>100</phys:TextureUScale>
- <phys:TextureVScale>100</phys:TextureVScale>
- </phys:HeightFieldState>
- </HeightFieldShape>
- </HeightFieldEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>StreetCone</sim:Name>
- <sim:Assets>
- <sim:Mesh>street_cone.obj</sim:Mesh>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>0.7000078</physm:X>
- <physm:Y>0.3490001</physm:Y>
- <physm:Z>-3.99999452</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-3.95723845E-08</physm:X>
- <physm:Y>-3.05023877E-06</physm:Y>
- <physm:Z>-1.70121879E-07</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>StreetCone</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0.45</physm:X>
- <physm:Y>0.7</physm:Y>
- <physm:Z>0.45</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:MassDensity>
- <phys:Mass>0.5</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </SingleShapeEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>greybox</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-2.004857</physm:X>
- <physm:Y>0.7489961</physm:Y>
- <physm:Z>-1.00070715</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>-8.509706E-06</physm:X>
- <physm:Y>4.158797E-05</physm:Y>
- <physm:Z>-2.693195E-06</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <BoxShape>
- <phys:BoxState>
- <phys:Name>greybox</phys:Name>
- <phys:ShapeId>Box</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>1</physm:X>
- <physm:Y>1.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0</phys:Radius>
- <phys:Material>
- <phys:Name>gbox</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>2</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.5</physm:X>
- <physm:Y>0.5</physm:Y>
- <physm:Z>0.5</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:BoxState>
- </BoxShape>
- </SingleShapeEntity>
- <SingleShapeEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
- <sim:State>
- <sim:Name>bluesphere</sim:Name>
- <sim:Assets>
- <sim:Effect>default</sim:Effect>
- </sim:Assets>
- <sim:Pose>
- <physm:Position>
- <physm:X>-2</physm:X>
- <physm:Y>0.799</physm:Y>
- <physm:Z>-3</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>-9.713688E-08</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </sim:Pose>
- <sim:Velocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:Velocity>
- <sim:AngularVelocity>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </sim:AngularVelocity>
- <sim:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </sim:MassDensity>
- <sim:Flags>Dynamic</sim:Flags>
- </sim:State>
- <Flags>None</Flags>
- <ChildCount>0</ChildCount>
- <ReferenceFrame>Global</ReferenceFrame>
- <MeshScale>
- <physm:X>1</physm:X>
- <physm:Y>1</physm:Y>
- <physm:Z>1</physm:Z>
- </MeshScale>
- <MeshRotation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshRotation>
- <MeshTranslation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </MeshTranslation>
- <SphereShape>
- <phys:SphereState>
- <phys:Name>bluesphere</phys:Name>
- <phys:ShapeId>Sphere</phys:ShapeId>
- <phys:Dimensions>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:Dimensions>
- <phys:Radius>0.8</phys:Radius>
- <phys:Material>
- <phys:Name>bphere</phys:Name>
- <phys:Restitution>0.5</phys:Restitution>
- <phys:DynamicFriction>0.4</phys:DynamicFriction>
- <phys:StaticFriction>0.5</phys:StaticFriction>
- <phys:MaterialIndex>3</phys:MaterialIndex>
- </phys:Material>
- <phys:MassDensity>
- <phys:Mass>10</phys:Mass>
- <phys:InertiaTensor>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </phys:InertiaTensor>
- <phys:CenterOfMass>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>0</physm:W>
- </physm:Orientation>
- </phys:CenterOfMass>
- <phys:Density>0</phys:Density>
- <phys:LinearDamping>0</phys:LinearDamping>
- <phys:AngularDamping>0</phys:AngularDamping>
- </phys:MassDensity>
- <phys:LocalPose>
- <physm:Position>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- </physm:Position>
- <physm:Orientation>
- <physm:X>0</physm:X>
- <physm:Y>0</physm:Y>
- <physm:Z>0</physm:Z>
- <physm:W>1</physm:W>
- </physm:Orientation>
- </phys:LocalPose>
- <phys:TextureFileName />
- <phys:DiffuseColor>
- <physm:X>0.4</physm:X>
- <physm:Y>0.3</physm:Y>
- <physm:Z>0.7</physm:Z>
- <physm:W>1</physm:W>
- </phys:DiffuseColor>
- <phys:EnableContactNotifications>false</phys:EnableContactNotifications>
- </phys:SphereState>
- </SphereShape>
- </SingleShapeEntity>
- </SerializedEntities>
- </SimulationState>
ROS:请参考:
1 http://blog.csdn.net/zhangrelay/article/details/52842627
2 http://blog.csdn.net/ZhangRelay/article/details/52842761
3 算法
算法是机器人设计的核心,由编程语言实现。不论RDS和ROS都提供了非常丰富的接口,可以使用几乎所有主流语言进行算法设计,同时,都提供了图形化编程方式,极大降低入门难度。
这里不涉及算法具体实现和说明,依据用途不同,有环境建模功能的,如SLAM等;也包括任务规划算法,还有物体分类识别,语音交互等,差别太大,依据需要自学。
RDS:
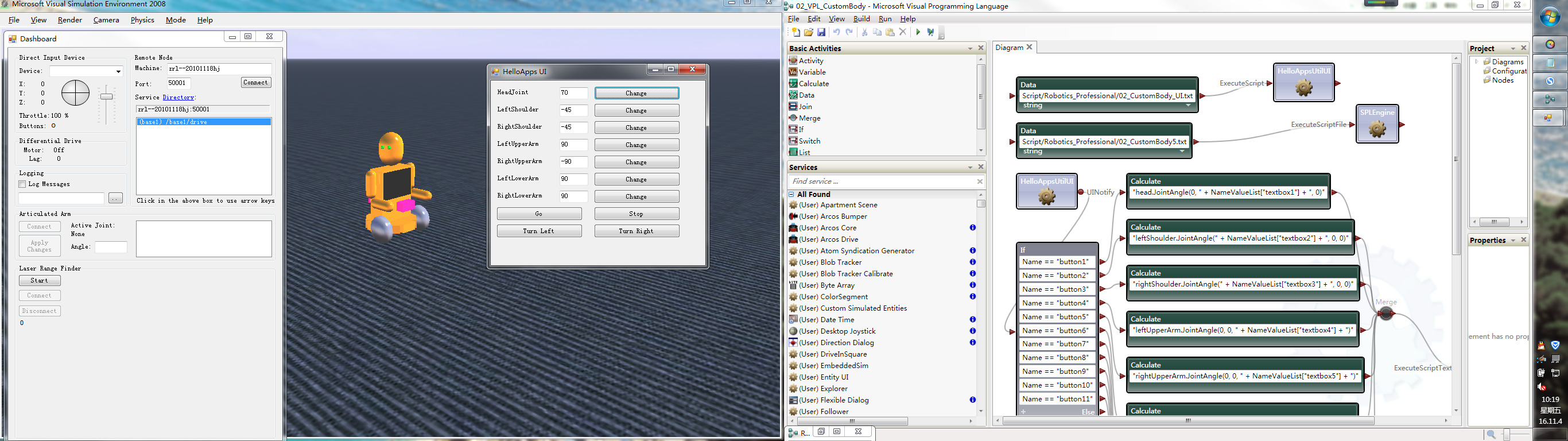
ROS:
http://blog.csdn.net/zhangrelay/article/details/53020569
依靠可视化图形编程,机器人编程能立刻普及到小学和幼儿园!
除此之外,RDS推荐C#和SPL,ROS推荐C++和Python,分别为编译型和解释型。
ROS indigo: http://blog.csdn.net/column/details/13335.html
ROS Kinetic: http://blog.csdn.net/column/details/13113.html

