
- 1VUE3 UI框架收藏_sg-ui
- 2剖析鸿蒙内核源码_鸿蒙内核源码分析
- 3ElasticSearch——详解主从模式,以及主节点的选取算法(二)_es 主从如何切换的
- 4Python 算法之递归与尾递归,斐波那契数列以及汉诺塔的实现_尾递归写汉诺塔
- 5-- 数据库的操作命令 笔记
- 6UE Json读写_uejos
- 7使用CSS实现书籍的翻页效果(使用了animation)_css书本翻页效果
- 8vue2+elTree 实现右键菜单_el-tree 右键菜单
- 9创建大量角色的GPU动画系统_tocomponentdataarrayasync gcalloc
- 10Vue项目运行时报错:‘vue-cli-service‘ 不是内部或外部命令,也不是可运行的程序 或批处理文件_vue-cli-service: 未找到命令
一文详解目标检测损失函数:IOU、GIOU、DIOU、CIOU
赞
踩
作者 | 记忆的迷谷
编辑 | 极市平台
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
后台回复【数据集下载】获取计算机视觉近30种数据集!
IOU损失函数:

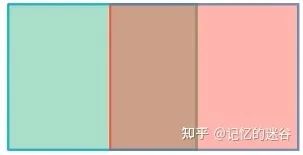
图片展示了3组矩形框重合的示例:绿色是真实目标存在的框GT box,黑色是预测的box位置。通过观察上图,发现第三个预测效果较好,因为预测目标的位置与真实目标最为接近。但是计算三组l2损失发现损失值都为8.41,然而IOU的值不同。因此说明l2损失不能准确反应两个目标边界框重合的程度,因此诞生了IOU损失函数。
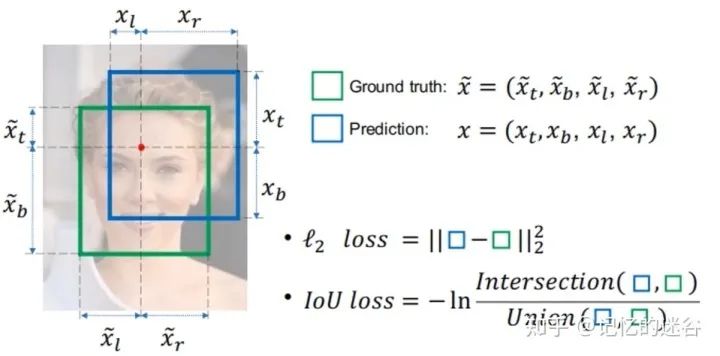
上图是IOU损失函数的计算方法:首先绿色的框表示真实目标的位置,蓝色框代表预测框的位置。IOU的计算方法很简单,用两个方框相交的面积/两个方框合并的面积,将得到的值取以e为底对数,前面添上负号就得到了IOU损失函数。
GIOU损失函数:
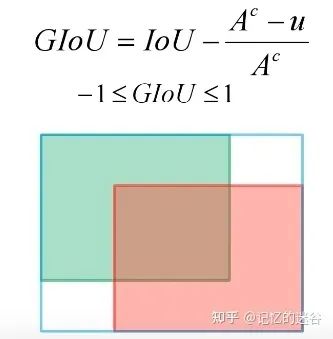
如图:绿色是真实目标边界框,红色是预测目标边界框,最外面的蓝色边框是将红绿矩形用最小矩形框起来的边界,Ac是蓝色矩形框的面积,u对应红绿矩形的并集面积。
如果当红绿矩形完美重合,那么IOU =1, Ac = u = 预测目标边界框面积,GIOU = 1 - 0 = 1。如果两个目标分开很远,Ac趋向于很大的数值,u趋于0,IOU也趋于0,GIOU = 0 - 1 = -1。因此GIOU取值的区间是[-1, 1]。
GIOU损失函数的最终表达形式是L(GIOU) = 1 - GIOU
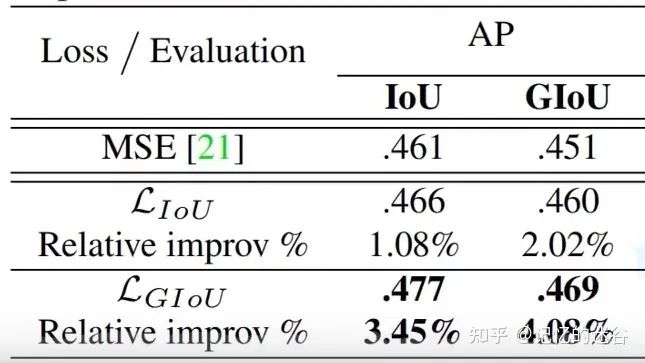
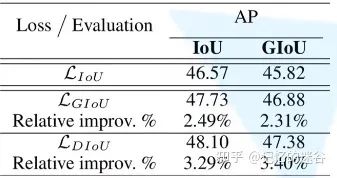
上表是原论文中的实验效果:第一列(AP-IoU一列)采用MSE(l2损失)的mAP=0.461,采用IoU损失得到的mAP=0.466,有些许提升。如果采用GIoU loss,能达到0.477,效果比IOU更好。
但是,GIOU也存在它的缺点:当两个预测框高宽相同,且处于同一水平面时,GIOU就退化为IOU。此外,GIOU和IOU还有两个缺点:收敛较慢、回归不够准确。
DIOU 损失函数:
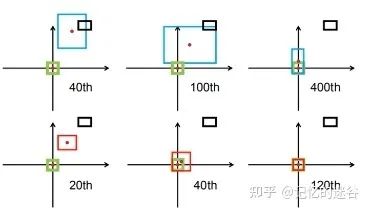
在介绍DIOU之前,先来介绍采用DIOU的效果:如图,黑色代表anchor box, 蓝色红色代表default box,绿色代表真实目标存在的框GT box的位置,期望红蓝框与绿框尽可能重合。第一行是使用GIOU训练网络,让预测边界框尽可能回归到真实目标边界框中,迭代到400次后才勉强重合。第二行使用DIOU训练网络,到达120步时,发现与目标边界框已经完全重合。可以看出,相对于GIOU,DIOU的不仅收敛速度更快,准确率也更高。
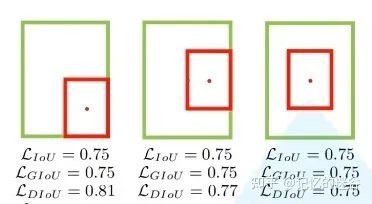
我们再看一组图,图中给出了3组目标边界框与目标边界框的重合关系,显然他们的重合位置不相同的,我们期望第三种重合(两个box中心位置尽可能重合。这三组计算的IOU loss和GIoU loss是一模一样的,因此这两种损失不能很好表达边界框重合关系)。但是DIOU计算出的三种情况的损失是不一样的,显然DIOU更加合理。

ρ代表b和b(gt)之间的欧氏距离
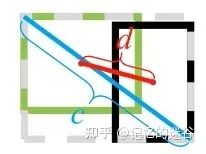
结合这张图理解一下公式:b代表预测中心坐标的参数,也就是黑框的中心点,bgt代表真实目标边界框中心的参数,即绿框中心点。ρ^2就是两个中心点距离的平方,即图中的d(红线)的平方,c代表两个矩形的最小外接矩形对角线(蓝线)长度。如果两个框完美重叠,d=0 ,IOU = 1,DIOU = 1 - 0 = 1 。如果两个框相距很远,d^2/c^2 趋近于1,IOU = 0, DIOU = 0 - 1 = -1 。因此,DIOU的取值范围也是[-1,1]。
DIOU最终损失函数为:L(DIoU) = 1 - DIOU
当采用DIOU loss,mAP为46.57,相较于Iou和GIOU准确率都有提高,且收敛速度相比IOU提高了3%左右。
CIOU LOSS:
论文中,作者表示一个优秀的回归定位损失应该考虑三种几何参数:重叠面积、中心点距离、长宽比。CIoU就是在DIoU的基础上增加了检测框尺度的loss,增加了长和宽的loss,这样预测框就会更加的符合真实框。
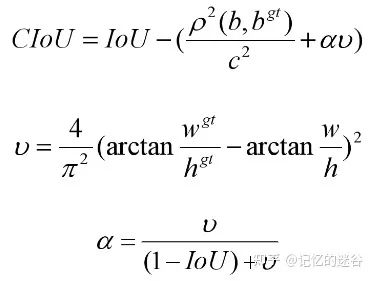
因此CIOU的三项恰好对应IOU,中心点距离,长宽比的计算。CIOU loss = 1 - CIoU。α和v为长宽比,计算公式如上图所示:w、h和w(gt)、h(gt)分别代表预测框的高宽和真实框的高宽。
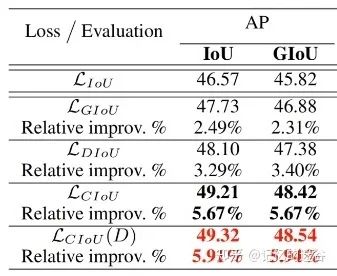
如果使用CIOU,mAP可以达到49.21%,相比于GIoU涨了1.5个百分点。CIOU(D)指在验证模型评价mAP时,将IOU换成DIOU,准确率还有提升 。
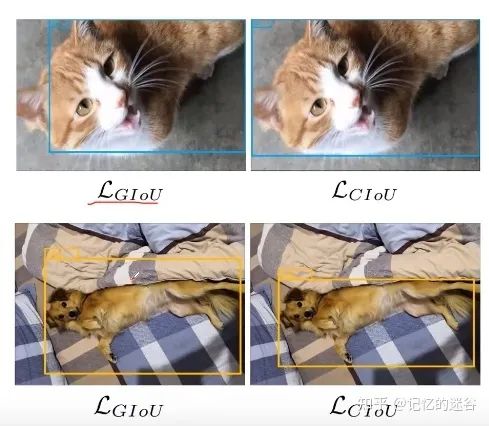
实际检测效果中,CIOU相比GIOU在框选目标时,能找到一个更合适的框选位置。如上图所示,第一行的两张图中,第一个猫猫使用GIOU损失函数,发现有一只猫耳朵在框外,第二只猫猫使用DIOU损失函数,将猫猫的位置准确标出。同样,第二行中,第一只狗狗虽然完整标出,但并不能准确框出狗狗的轮廓,而第二张图检测框的位置刚好合适。
【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、多传感器融合、SLAM、光流估计、轨迹预测、高精地图、规划控制、AI模型部署落地等方向;
加入我们:自动驾驶之心技术交流群汇总!
自动驾驶之心【知识星球】
想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球(三天内无条件退款),日常分享论文+代码,这里汇聚行业和学术界大佬,前沿技术方向尽在掌握中,期待交流!

- 相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

