
- 1react hooks useEffect 执行两次解决方案_react 修改form表单会触发useeffect
- 2Vue页面刷新常用的4种方法_vue刷新页面
- 3【人工智能】大模型的发展历史_大模型发展历程
- 4民谣女神唱流行,基于AI人工智能so-vits库训练自己的音色模型(叶蓓/Python3.10)_info:torch.nn.parallel.distributed:reducer buckets
- 5PropertyDrawer
- 6opencv 出现“cv::debug_build_guard” 链接失败_in function 'cv::debug_build_guard::_outputarray::
- 7Unity MMORPG游戏优化经验分享_mmorpg游戏unity
- 8Pytorch学习(六) --- 模型训练的常规train函数flow及其配置_pytorch框架下train如何书写
- 9ue4打包失败与解决办法unknown error_ue4打包错误提示解释
- 10javascript学习之表单,FormData 对象_javascript fromdata
【51单片机】直流电机驱动(PWM)(江科大)
赞
踩
1.直流电机介绍
· 直流电机是一种将电能转换为机械能的装置。一般的直流电机有两个电极,当电极正接时,电机正转,当电极反接时,电机反转
· 直流电机主要由永磁体(定子)、线圈(转子)和换向器组成
· 除直流电机外,常见的电机还有步进电机、舵机、无刷电机、空心杯电机等

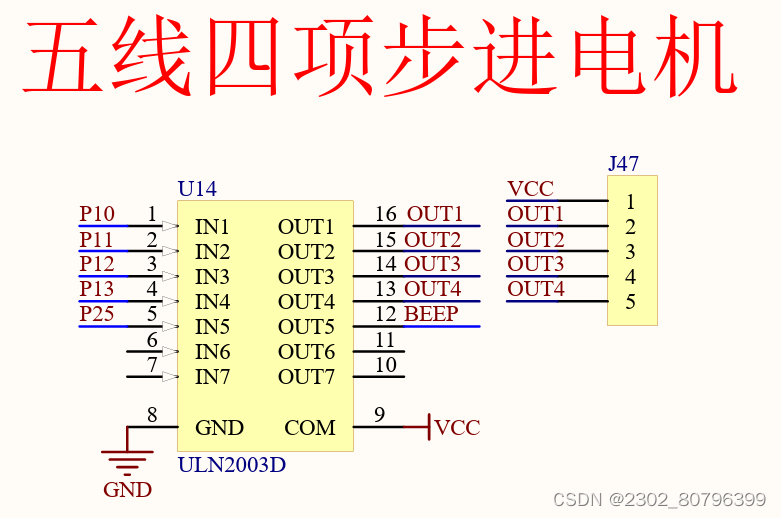
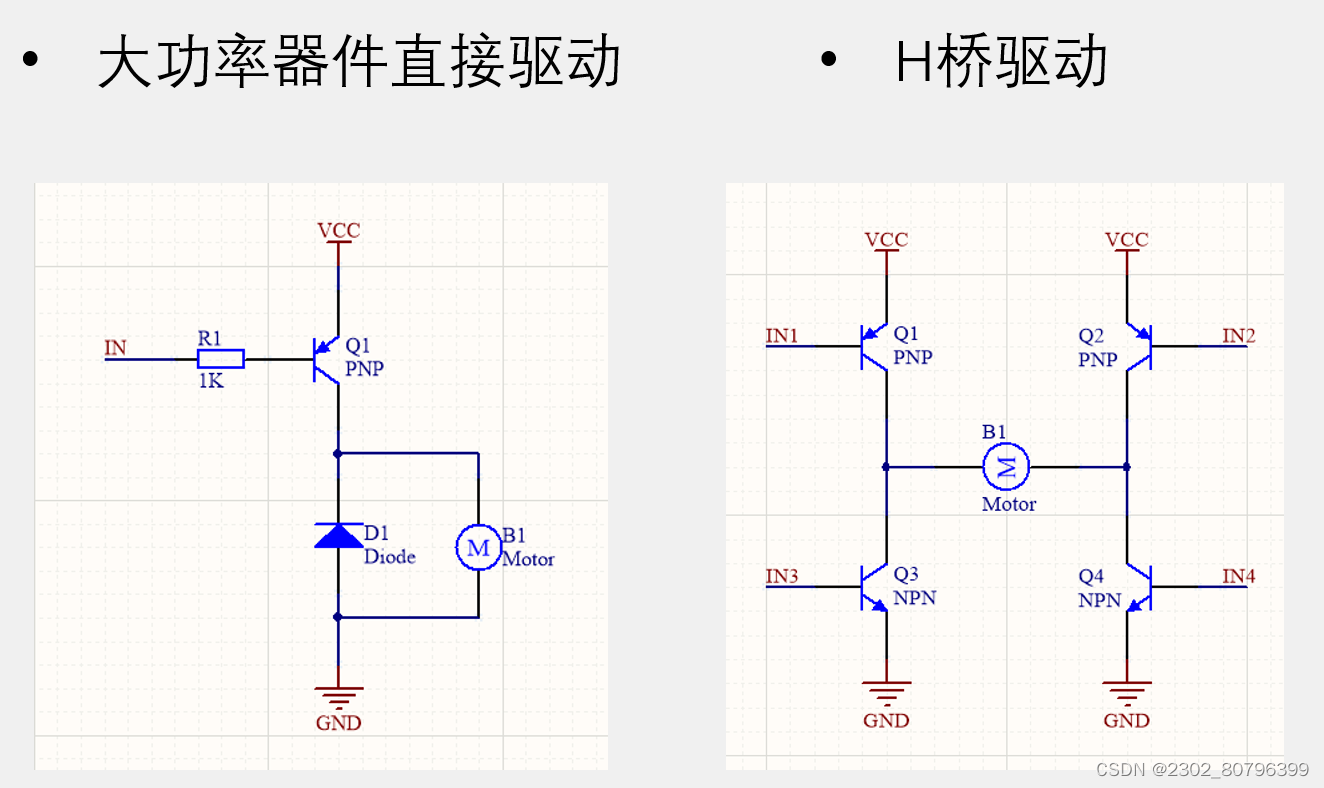
2.电机驱动
电机的驱动无法直接使用IO口来进行驱动,所以用驱动电路来进行驱动,如大功率器件直接驱动,H桥驱动。本开发板直接用ULN2300来进行驱动,只需将电机的一端接VCC,另一端接OUT1就可。此时,在IN1输入1,则OUT1输出0,电机旋转;在IN1输入0,则OUT1输出1,电机不旋转
3.PWM介绍
· PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域
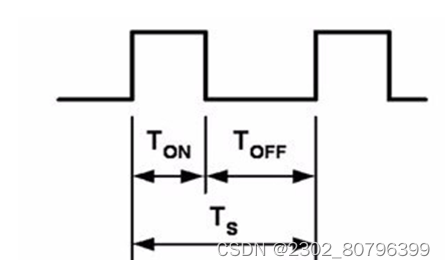
· PWM重要参数:
频率=1/Ts
占空比=ToN/Ts
精度=占空比变化步距
通过设置不同的占比来进行控制
通常一个周期的时间是相同的
4.LED呼吸灯
LED的IO口为0时,LED亮,为1时,LED灭;10口为1时,LED灯不会立刻熄灭,而是缓慢熄灭(具有惯性)
所以可以通过控制高电平和低电平的宽度即占空比来控制LED灯的亮度
通过逐步增加高电平宽度,减少低电平宽度,可使得LED灯越来越暗;反之,逐步增加低电平宽度,减少高电平宽度,可使得LED灯越来越亮
#include <REGX52.H> sbit LED=P2^0; void Delay(unsigned int t) { while(t--); } void main() { unsigned char Time,i; while(1) { for(Time=0;Time<100;Time++) //改变亮灭时间,由暗到亮 { for(i=0;i<20;i++) //计次延时 { LED=0; //LED亮 Delay(Time); //延时Time LED=1; //LED灭 Delay(100-Time); //延时100-Time } } for(Time=100;Time>0;Time--) //改变亮灭时间,由亮到暗 { for(i=0;i<20;i++) //计次延时 { LED=0; //LED亮 Delay(Time); //延时Time LED=1; //LED灭 Delay(100-Time); //延时100-Time } } } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
此方案简单,但是需要占用主循环,不断翻转IO口延时,主循环无法做其他事情
优化
LED呼吸灯:定时器版
在实际使用中,都会用定时器来产生PWM,而本51单片机的芯片不具备这一功能,所以用软件来模拟这个功能
产生PWM方法:

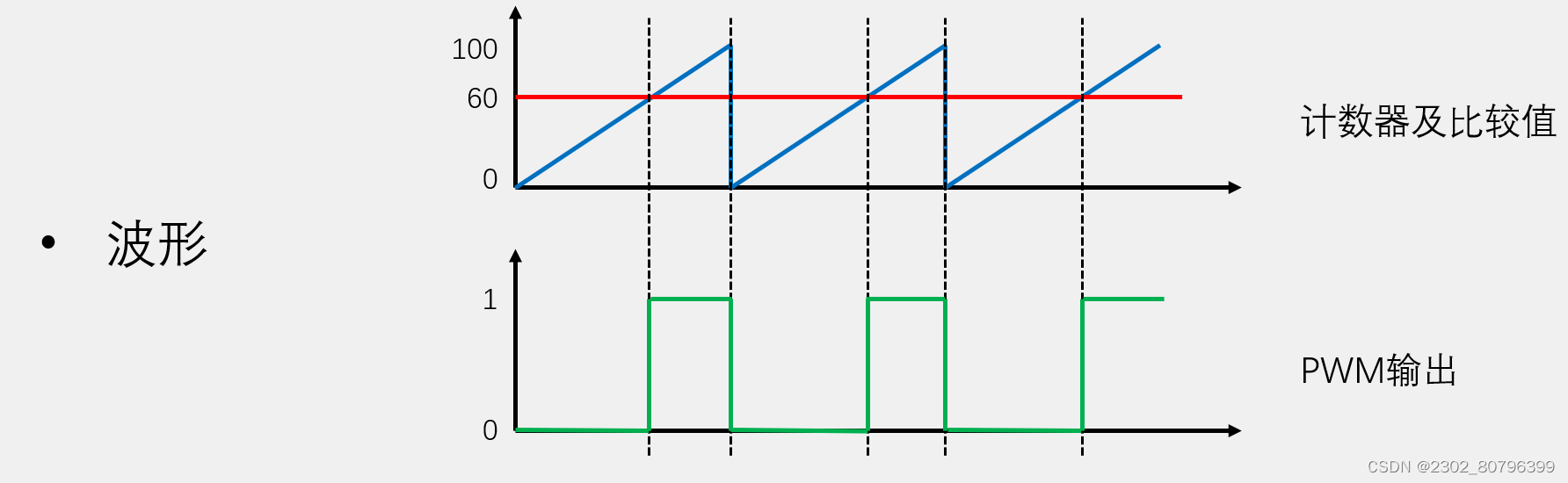
通过自增的计数器来和预先设定的比较值来进行比较,计数器的值小于比较值时,输出0,反之输出1,也可以相反。
先将定时器修改为100us触发一次(电机的频率一般在10K到20KHz之间)
#include <REGX52.H> #include "Key.h" #include "Timer.h" #include "Nixie.h" sbit LED = P2^0; //计数值和比较值,用于输出PWM unsigned char Counter, Compare; unsigned char KeyNum, Speed; void main() { Timer0Init(); Compare = 5; while(1) { KeyNum = GetKeyNum(); if(KeyNum == 1) { Speed++; Speed %= 4; if(Speed==0){Compare=0;} //设置比较值,改变PWM占空比 if(Speed==1){Compare=50;} if(Speed==2){Compare=75;} if(Speed==3){Compare=100;} } NixieShowNum(1,Speed); } } //定时器0的中断处理函数 void Timer0_Routine() interrupt 1 { TL0 = 0x9C; //设置定时初值 TH0 = 0xFF; //设置定时初值 Counter++; Counter %= 100; if(Counter < Compare) { LED = 0; } else { LED = 1; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
5.直流电机调速
在原代码的基础上改个IO口就行(根据上述分析,Motor=1旋转)
#include <REGX52.H> #include "Delay.h" #include "Key.h" #include "Nixie.h" #include "Timer0.h" sbit Motor=P1^0; unsigned char Counter,Compare; //计数值和比较值,用于输出PWM unsigned char KeyNum,Speed; void main() { Timer0_Init(); while(1) { KeyNum=Key(); if(KeyNum==1) { Speed++; Speed%=4; if(Speed==0){Compare=0;} //设置比较值,改变PWM占空比 if(Speed==1){Compare=50;} if(Speed==2){Compare=75;} if(Speed==3){Compare=100;} } Nixie(1,Speed); } } void Timer0_Routine() interrupt 1 { TL0 = 0x9C; //设置定时初值 TH0 = 0xFF; //设置定时初值 Counter++; Counter%=100; //计数值变化范围限制在0~99 if(Counter<Compare) //计数值小于比较值 { Motor=1; //输出1 } else //计数值大于比较值 { Motor=0; //输出0 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45


