
- 1如何去掉流氓网站http://www.2345.com/?177
- 2关于tomcat不能启动的问题(NB:JAVA_HOME should point to a JDK not a JRE)
- 3JAVA面试题28
- 4einj 注入内存ue/ce故障_内存uce错误是什么意思
- 5详解Python中sys模块的功能与应用
- 6第10章Tcl脚本编程(一)
- 7【私有云盘】搭建PHP轻量文件管理器 - TinyFileManager「公网远程访问」_php 文件管理系统
- 8ps -ef | grep 命令详解
- 9protobuf安装步骤---ubuntu_ubuntu安装protobuf
- 10【最新版】Python全网最全、蕞详细的库都这里了,需要的赶紧码住!_python函数库
SOTA!目标检测开源框架YOLOv6 3.0版本来啦
赞
踩
近日,美团视觉智能部发布了 YOLOv6 3.0 版本,再一次将目标检测的综合性能推向新高。YOLOv6-L6 检测精度和速度超越 YOLOv7-E6E,取得当前实时目标检测榜单 SOTA。本文主要介绍了 YOLOv6 3.0 版本中引入的技术创新和优化,希望能为从事相关工作的同学带来一些启发或帮助。
1. 概述
2. 关键技术介绍
-
2.1 表征能力更强的 RepBi-PAN Neck 网络
2.2 全新的锚点辅助训练(Anchor-Aided Training)策略
2.3 无痛涨点的 DLD 解耦定位蒸馏策略
3. 总结
1. 概述
1 月 6 日,美团视觉智能部发布了 YOLOv6 3.0 版本,再一次将目标检测的综合性能推向新高。本次更新除了对 YOLOv6-N/S/M/L 模型进行全系列升级之外,还推出了大分辨率 P6 模型。其中,YOLOv6-L6 检测精度达到 57.2% AP,在 T4 卡上推理速度可达 29 FPS,超越 YOLOv7-E6E,取得当前实时目标检测榜单 SOTA。
技术报告:YOLOv6 v3.0: A Full-Scale Reloading
YOLOv6 Github 传送门:https://github.com/meituan/YOLOv6,欢迎 Star 收藏,随时取用。
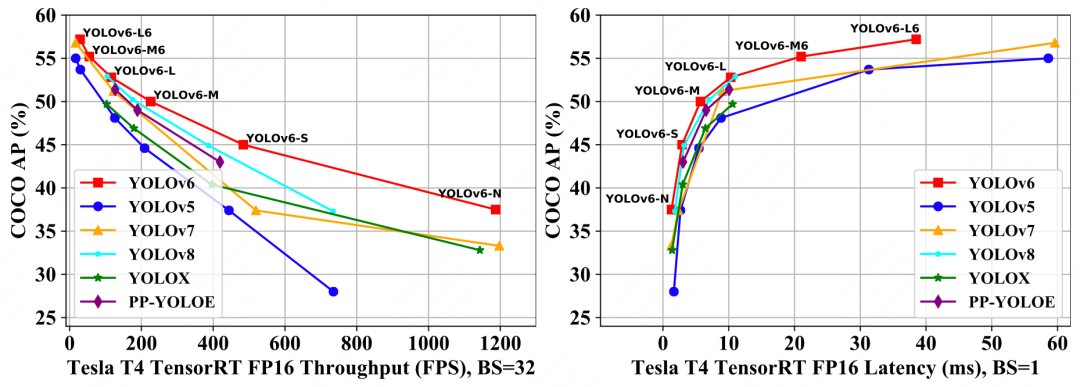
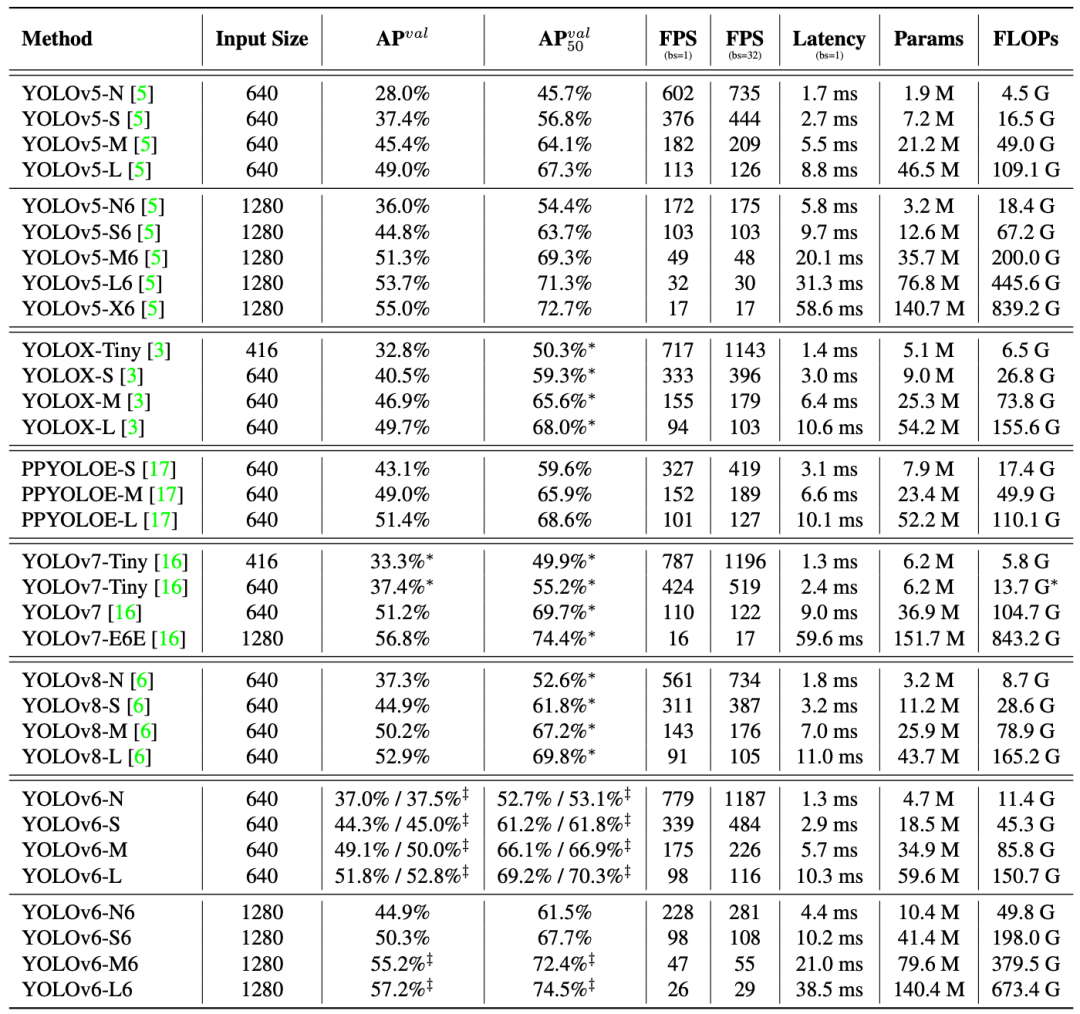
注:YOLOv6 系列模型均在训练 300epoch 且不使用预训练模型或额外检测数据集下获得,“‡” 表示采用了自蒸馏算法,“*” 表示从官方代码库对发布模型进行重新测评的指标。以上速度指标均在 T4 TRT7.2 环境下测试。
2. 关键技术介绍
本次更新主要在 Neck 网络设计、训练和蒸馏策略等方面进行了创新和优化:
设计了表征能力更强的可重参化双向融合 PAN(
RepBi-PAN
)Neck 网络;
提出了全新的锚点辅助训练(
Anchor-Aided Training
)策略;
提出了解耦定位蒸馏(
Decoupled Location Distillation
)策略以提升小模型的性能。
2.1 表征能力更强的 RepBi-PAN Neck 网络
有效的多尺度特征融合网络对目标检测的效果尤为关键。特征金字塔网络 (FPN)通过自上而下的路径来融合来自骨干网络不同 Stage 的输出特征以弥补网络学习过程中目标位置信息的损失。鉴于单向信息流传输的局限性,PANet 在 FPN 之上添加了一个额外的自底向上路径。BiFPN 为不同的输入特征引入了可学习的权重,并简化了 PAN 以实现更好的性能和更高的效率。PRB-FPN 通过具有双向融合的并行残差 FPN 结构来保留高质量的特征,以进行准确定位。
受到上述工作的启发,我们提出了一个表征能力更强的可重参化双向融合 PAN(RepBi-PAN)Neck 网络。一般而言,骨干网络浅层特征分辨率高,具有丰富的空间信息,有利于目标检测中的定位任务。为了聚合浅层特征,常见的做法是在 FPN 中增加 P2 融合层以及一个额外的检测头,但这往往会带来较大的计算成本。
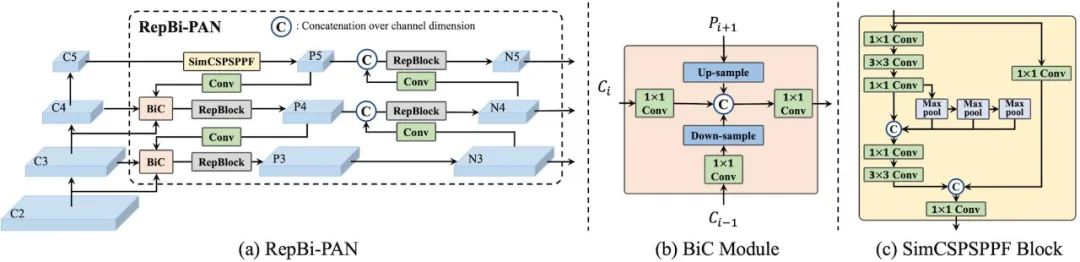
为了实现更好的精度和时延权衡,我们设计了一个双向联结(Birectional Concatenate, BiC)模块,在自上而下的传输路径中引入自底向上的信息流,使得浅层特征能以更高效的方式参与多尺度特征融合,进一步增强融合特征的表达能力。此模块能够帮助保留更准确的定位信号,这对于小物体的定位具有重要意义。
此外,我们对上一版本的 SimSPPF 模块进行了特征增强优化,以丰富特征图的表示能力。我们发现 YOLOv7 使用的 SPPCSPC 模块能够提升检测精度,但对网络推理速度的影响较大。于是我们对其进行了简化设计,在检测精度影响不大的情况下,大大提升了推理效率。同时,我们引入了可重参数化思想并对 Neck 网络的通道宽度和深度进行了相应的调整。最终 RepBi-PAN 网络结构如下图 2 所示:
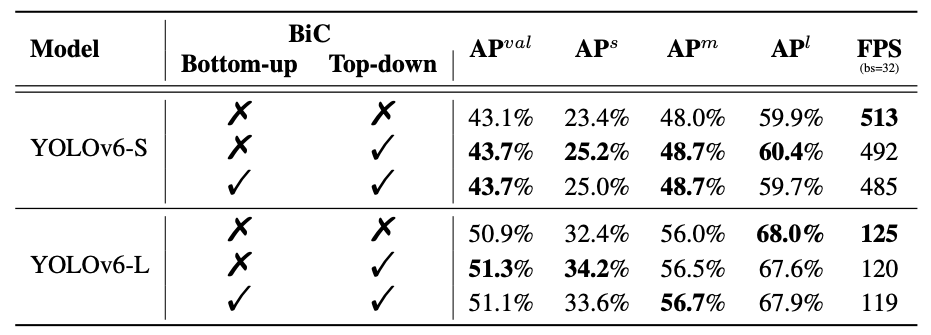
从表2可以看到,在 YOLOv6-S/L 模型上,仅在 PAN 网络自上而下的传输路径引入 BiC 模块后,对推理速度影响保持在 4% 的情况下,检测精度分别提升 0.6% 和 0.4% AP。当我们尝试额外地在自底向上的信息流中将常规联结替换成 BiC 模块时,反而没有获得进一步正向的增益,因此我们仅在自上而下的路径中应用 BiC 模块。与此同时,我们还注意到,BiC 模块能够为小目标的检测精度带来 1.8% AP 的提升。
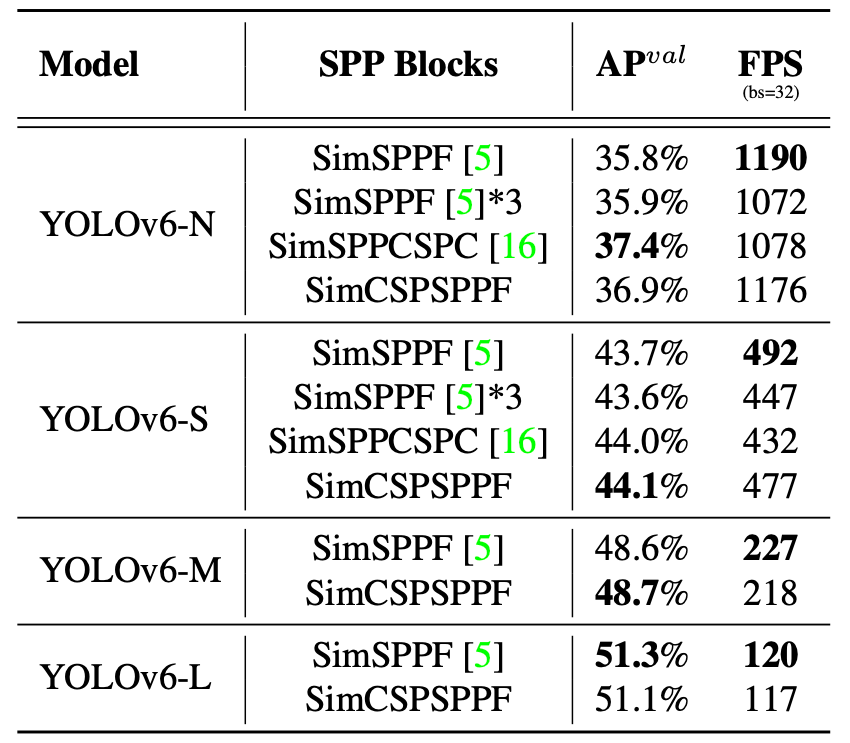
在表 3 中,我们对不同的 SPP 模块对模型精度和速度影响做了实验对比,其中包括经过我们简化设计的 SPPF、SPPCSPC 和 CSPSPPF 模块。除此之外,我们还尝试了在骨干网络 C3、C4 和 C5 的输出特征后分别采用了 SimSPPF 模块以加强特征的聚合表达,在表中用 SimSPPF * 3表示。从实验结果来看,重复使用 SimSPPF 模块虽然增加了计算量,但并没有带来检测精度的进一步提升。
经简化设计的 SPPCSPC 模块对比 SimSPPF 模块 在 YOLOv6-N/S 模型上分别提升了 1.6% 和 0.3% AP,但对推理速度 FPS 降低约10%。而当我们将 SimSPPF 模块替换为优化后的 SimCSPSPPF 模块后,在 YOLOv6-N/S/M 模型上分别取得了1.1%/0.4%/0.1% 的精度增益,同时推理速度对比 SimSPPCSPC 模块有较大的提升。因此,为了更好的精度-效率权衡,在 YOLOv6-N/S 上采用 SimCSPSPPF 模块,而在 YOLOv6-M/L 上采用 SimSPPF 模块。
2.2 全新的锚点辅助训练(Anchor-Aided Training)策略
基于深度学习的目标检测技术从学习范式上主要可分为 Anchor-based 和 Anchor-free 两大类,这两类方法针对不同尺度的目标检测上分别存在不同的优势。我们使用 YOLOv6-N 作为基线,对 Anchor-based 和 Anchor-free 范式的异同点进行了相关的实验和分析。

从表 4 中可以看出,当 YOLOv6-N 分别采用 Anchor-based 和 Anchor-free 训练范式时,模型的整体 mAP 几乎接近,但采用 Anchor-based 的模型在小、中、大目标上的 AP 指标会更高。从以上的实验可以得出结论:相比于 Anchor-free 范式,基于 Anchor-based 的模型存在额外的性能增益。
同时我们发现,YOLOv6 使用 TAL 进行标签分配时,其模型精度的稳定性与是否采用 ATSS 预热有较大关系。当不使用 ATSS 预热时,对同样参数配置的 YOLOv6-N 进行多次训练,模型精度最高可达35.9% mAP,最低至 35.3% mAP,相同模型会有 0.6% mAP 的差异。但当使用 ATSS 预热时,模型精度最高却只能到达 35.7% mAP。从实验结果可以分析得出,ATSS 的预热过程利用了 Anchor-based 的预设信息,进而达到稳定模型训练的目的,但也会在一定程度上限制网络的峰值能力,因此并不是一种最优的选择。
受到上述工作的启发,我们提出了基于锚点辅助训练(Anchor-Aided Training,AAT)策略。在网络训练过程中,同时融合 Anchor-based 和 Anchor-free 的两种训练范式,并对全阶段网络进行映射及优化,最终实现了Anchor 的统一,充分发挥了结合不同 Anchor 网络的各自优势,从而进一步提升了模型检测精度。具体来说:
一方面,我们会在网络的分类头和回归头上分别添加 Anchor-based 辅助分支,在训练阶段,该分支与 Anchor-free 分支分别进行独立的 Loss 计算,之后会对 Loss 进行相加,各自反向传播进行网络的优化。通过 Anchor-based 辅助分支,为网络训练引入额外的内嵌指导信息,并与 Anchor-free 分支的信息进行整合,从而达到对结合不同 Anchor 网络的全方位融合的目的,进一步挖掘网络自身的潜力,充分发挥其效能。
另一方面,在网络标签匹配的过程中引入了同特征点密集采样的机制。通过扩大每次样本匹配过程中所选取候选框的范围,增加候选框中正样本的数量,并且对同一特征点重复投放采样点,进一步提升在训练过程中候选框的质量。与此同时,在网络的每一层中还会搭配原始的 Anchor-free 分支,进一步提升候选框的多样性。
除此之外,我们还提出灵活配置的训练策略,仅在训练过程中引入额外的辅助分支,在测试过程中不予使用。最终在不增加推理时间的情况下,提升网络精度,无痛涨点。最终 AAT 策略的示意图如下图 3 所示:

采用 AAT 训练策略的消融实验结果如下表 5 所示。我们在 YOLOv6 的各尺寸模型上进行了实验,其中 YOLOv6-S 模型采用 AAT 策略后有 0.3% 的精度增益,而在 YOLOv6-M/L 模型上分别带来了0.5% 的精度增益。值得注意的是,YOLOv6-N/S/M 在小目标检测的精度指标得到了显着增强。

2.3 无痛涨点的 DLD 解耦定位蒸馏策略
在目标检测的蒸馏任务中,LD 通过引入 DFL 分支,从而达到了在网络中对定位信息蒸馏的目的,使分类和定位信息得以同步回传,弥补了 Logit Mimicking 方法无法使用定位蒸馏信息的不足。但是,DFL 分支的添加,对于小模型速度的影响是很明显的。添加了 DFL 分支后,YOLOv6-N 的速度下降了 16.7%,YOLOv6-S 的速度下降了 5.2%。而在实际的工业应用当中,对于小模型速度的要求往往很高。因此,目前的蒸馏策略并不适合于工业落地。
针对这个问题,我们提出了基于解耦检测任务和蒸馏任务的 DLD(Decoupled Location Distillation)算法。DLD 算法会在网络每一层的回归头上分别添加了额外的强化回归分支,在训练阶段,该分支同样会参与 IoU 损失的计算,并将其累加到最终的 Loss 中。
通过增加的额外的强化回归分支,可以对网络添加更多的额外约束,从而对网络进行更全面细致的优化。并且,DLD算法在对强化回归分支进行训练时,引入了分支蒸馏学习策略。分支蒸馏学习策略会仅使用 DFL 分支参与网络标签分配的过程,并将标签分配的结果投入到强化回归分支进行引导学习,从而参与强化回归分支的损失函数计算和反向传播优化。
一方面,DFL 分支的精度更高,在整个训练周期可以起到对强化分支蒸馏的作用,进一步提升强化分支的精度。
另一方面,通过分支蒸馏进行的引导学习,可以进一步将 DFL 分支的效果传递给强化回归分支,为之后的灵活配置起到铺垫作用。
除此之外,DLD 算法同样搭配了灵活配置的训练策略,在训练过程中采用双回归分支结构,对网络进行更全面细致的优化,进一步对齐双分支的回归能力。在测试过程中,移除掉冗余的 DFL 分支,仅保留强化回归分支,在简化网络的同时保持网络精度,最终实现了对目标检测算法可无痛涨点的 DLD 蒸馏算法。DLD 的消融实验结果如下表6所示:

在表 6 中,我们在 YOLOv6-S 模型上分别对比了训练双倍轮数和采用 DLD 策略对模型性能的影响,从实验数据可以看出,当训练 600epoch时,YOLOv6-S 仅能达到 44.6% mAP。而采用 DLD 蒸馏策略后,YOLOv6-S 检测精度比使用双倍轮数训练的高 0.5%,最终达到45.1%。由此可得,DLD 蒸馏策略可在不影响推理效率的前提下,提升小模型的检测精度,实现无痛涨点。
3. 总结
本文对 YOLOv6 3.0 版本的技术创新和优化进行了详细解析,希望能帮助用户理解相关算法设计的思路以及具体实现。
未来,我们还会持续完善 YOLOv6 社区生态,同时也欢迎社区同学加入我们,共同建设一个适合工业界应用的更快更准的目标检测框架。
再次附上 YOLOv6 Github 的传送门:https://github.com/meituan/YOLOv6 ,感谢您的 Star 收藏。
4. 本文作者
楚怡、奕非、露露等,均来自美团视觉智能部。
---------- END ----------
分享
收藏
点赞
在看


