
热门标签
热门文章
- 1Java单机版五子棋的设计与实现(团队)_五子连珠游戏设计与实现
- 2DVWA的Xss跨站脚本攻击(反射型)_反射型xss攻击实例
- 3MySQL的数据类型都有哪些?它们分别用在什么的场景?_说明下列数据类型的不同应用场合。 year/int,float/decimal,varchar/bi
- 4vue项目转桌面应用程序_如何将一个springboot+vue项目打包成桌面应用
- 5PyTorch搭建卷积神经网络(CNN)实现手写数字识别_基于pytorch搭建cnn实现手写数字识别
- 6【完全开源】小安派-Eyes-R1/R2——4寸RGB屏幕驱动板_rgb屏幕电路
- 7Spring Boot 配置Druid监控以及基本特征监测使用_druid.filter.stat.db-type
- 8CSS(五)
- 9安卓studio连接手机之后,一两秒之后就自动断开了。问题解决。
- 10Kubernetes PodSecurityPolicy_kuboard 创建cephfs 检查podsecuritypolicy: cephfs-csi-n
当前位置: article > 正文
ros:使用gmapping 和 hector_slam功能包实现SLAM仿真,并将简历完成的地图保存到功能包的maps文件夹中,以及基于move_base和amcl功能包的机器人自主导航仿真_hector_slam导航
作者:我家自动化 | 2024-03-30 05:22:48
赞
踩
hector_slam导航
使用gmapping 和 hector_slam功能包实现SLAM仿真,并将简历完成的地图保存到功能包的maps文件夹中,以及基于move_base和amcl功能包的机器人自主导航仿真
注意:要先导入相应的ros包,launch文件才能进行后面的操作




1. 使用gmapping仿真并并将简历完成的地图保存到功能包的maps文件夹中
先下载gmapping包

打开gazebo模型

如图:
 打开rviz,模拟
打开rviz,模拟

如图:

执行以下代码进行机器人的移动:

在这个终端上面,按键盘上的uiojklm,.键来控制机器人的移动

如下图:开始移动,扫描

最终移动一圈之后,形成的图形

为了把这个地图保存下来,于是要先安装一个map-server这个包
 然后输入下面的指令,进行保存
然后输入下面的指令,进行保存
如下面的红框内的两个pgm和yaml文件

打开可以查看pgm,即保存的地图

可以打开yaml文件查看地图的参数

2. hector_slam功能包实现SLAM仿真,并将简历完成的地图保存到功能包的maps文件夹中
下载hector_slam功能包

打开gazebo

打开rviz

开始机器人的移动控制

如下图,移动一圈之后,最后的结果:

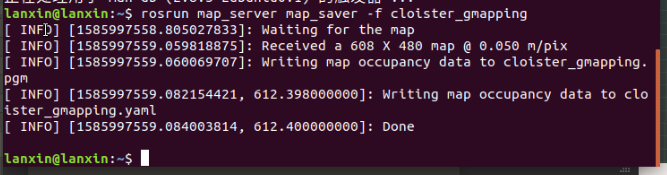
保存为hector_gmapping

可以看见下面红框内即为保存的

依然可以打开查看地图及参数:


基于move_base和amcl功能包的机器人自主导航仿真
先要安装move_base包

打开gazebo

打开rviz,查看地图

可以通过2D new goal让机器人移动

进行自主导航
第一步:

第二步:

 第三步:
第三步:
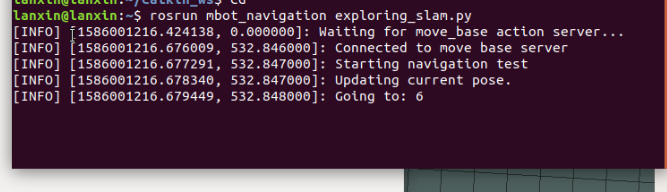
如下图,机器人就会自己导航进行探索,绘制地图

由于我的机器人运动缓慢,等了很久还没有绕一圈,所以没有等下去了,地图概况大概如下:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/339274
推荐阅读
相关标签

