
热门标签
热门文章
- 1【小5聊】Sql Server时间转换和查询时间范围查询不正确的原因_sql导出时间格式不对
- 2收藏!!BAT 程序员们常用的开发工具
- 3互联网架构实践心得 (二)—屡试不爽的架构三马车
- 4OpenVPN Connect使用连接公网VPN服务器实现内网穿透
- 5数据结构的算法_数据结构算法
- 6java 后端 简单的分词_java自己写分词
- 7vs 2019 跨平台开发_2019年跨平台应用程序开发入门
- 8mysql安装后没有配置环境变量_mysql的安装为什么没有配置环境变量
- 9【计算机视觉 | timm】模型 API 和预训练权重(含代码)_timm预训练
- 10git 报错 gitThere is no tracking information for the current branch. Please specify which branch you w_please specify which branch you want to merge with
当前位置: article > 正文
自动驾驶—连续系统LQR最优控制的黎卡提方程推导_lqr控制算法中的q和r是啥
作者:我家自动化 | 2024-04-06 02:47:06
赞
踩
lqr控制算法中的q和r是啥
1. Why use the Riccati equation?
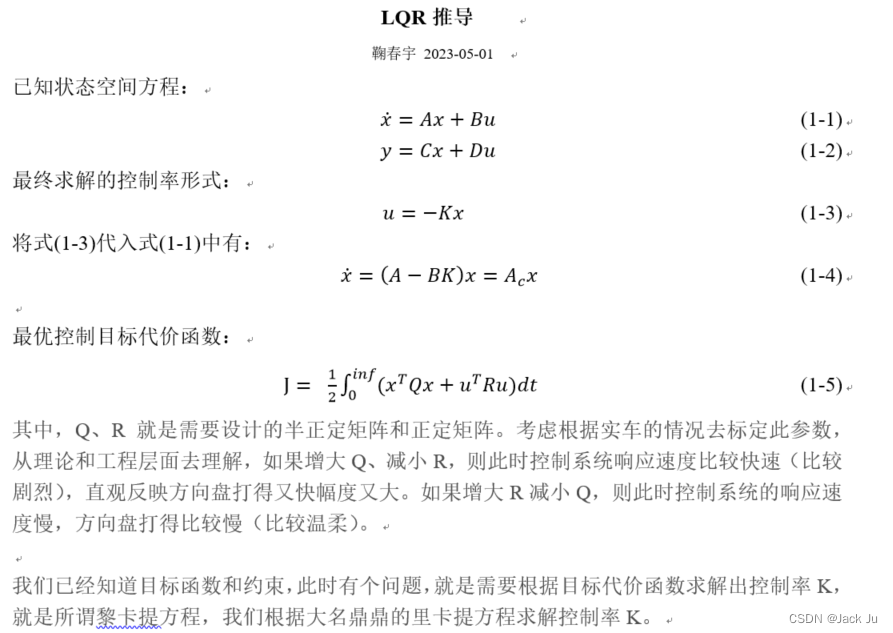
最优控制算法LQR是Linear Quadratic Regulator的缩写,Q、R就是需要设计的半正定矩阵和正定矩阵。考虑根据实车的情况去标定此参数,从理论和工程层面去理解,如果增大Q、减小R,则此时控制系统响应速度比较快速(比较剧烈),直观反映方向盘打得又快幅度又大。如果增大R减小Q,则此时控制系统的响应速度慢,方向盘打得比较慢(比较温柔)。
我们已经知道目标函数和约束,此时有个问题,就是需要根据目标代价函数求解出控制率K,就是所谓黎卡提方程,我们根据大名鼎鼎的里卡提方程求解控制率K。
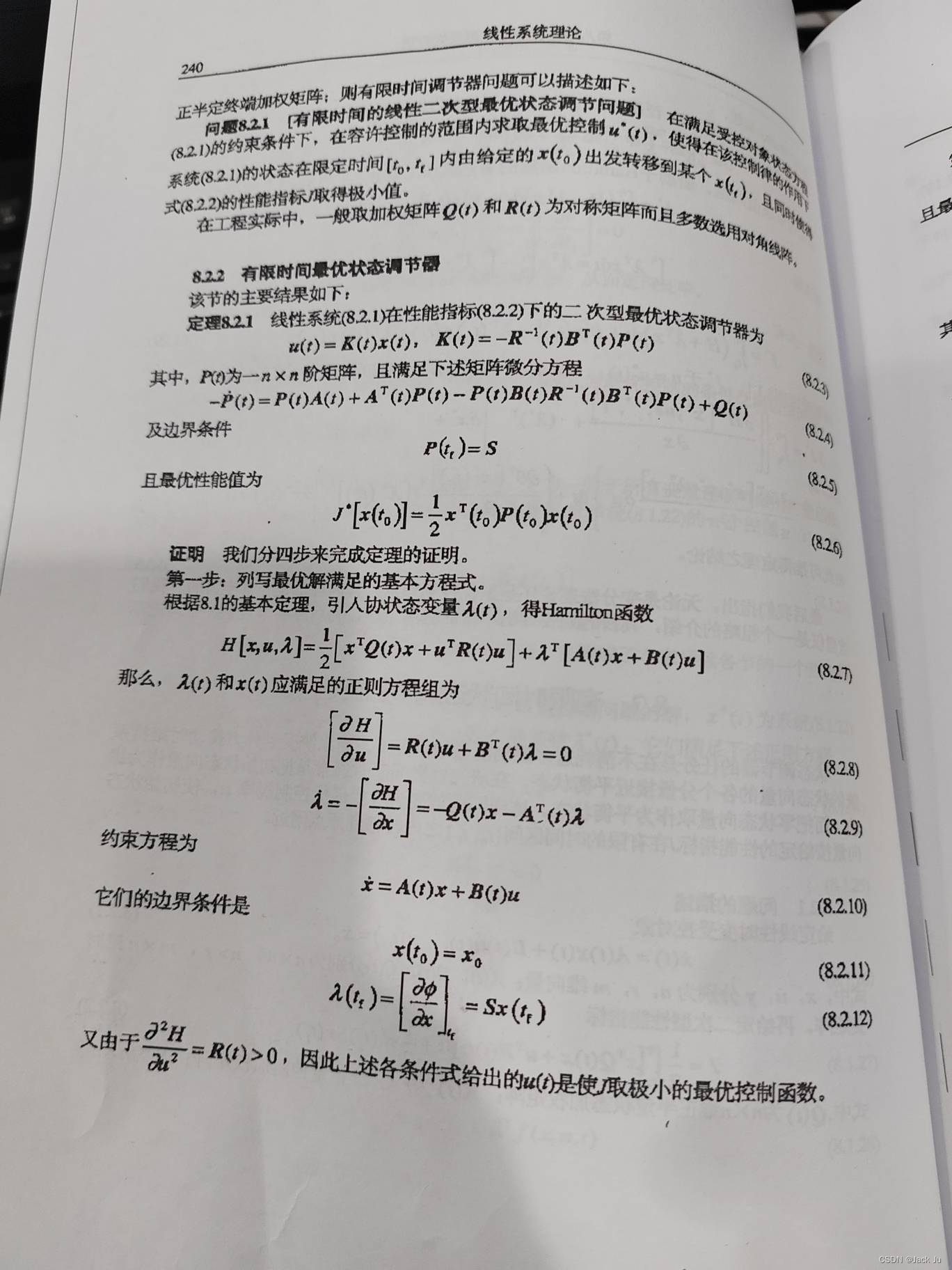
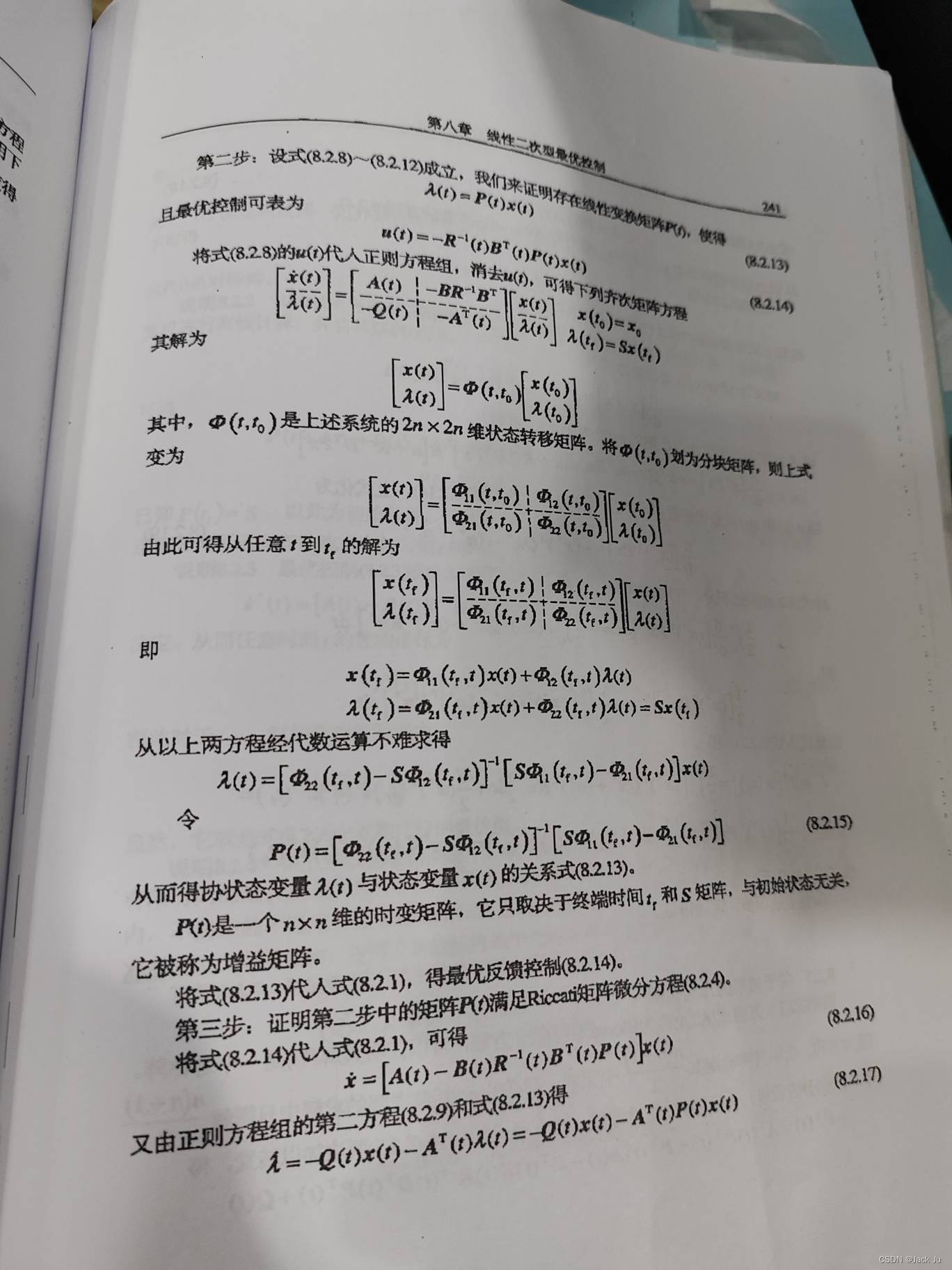
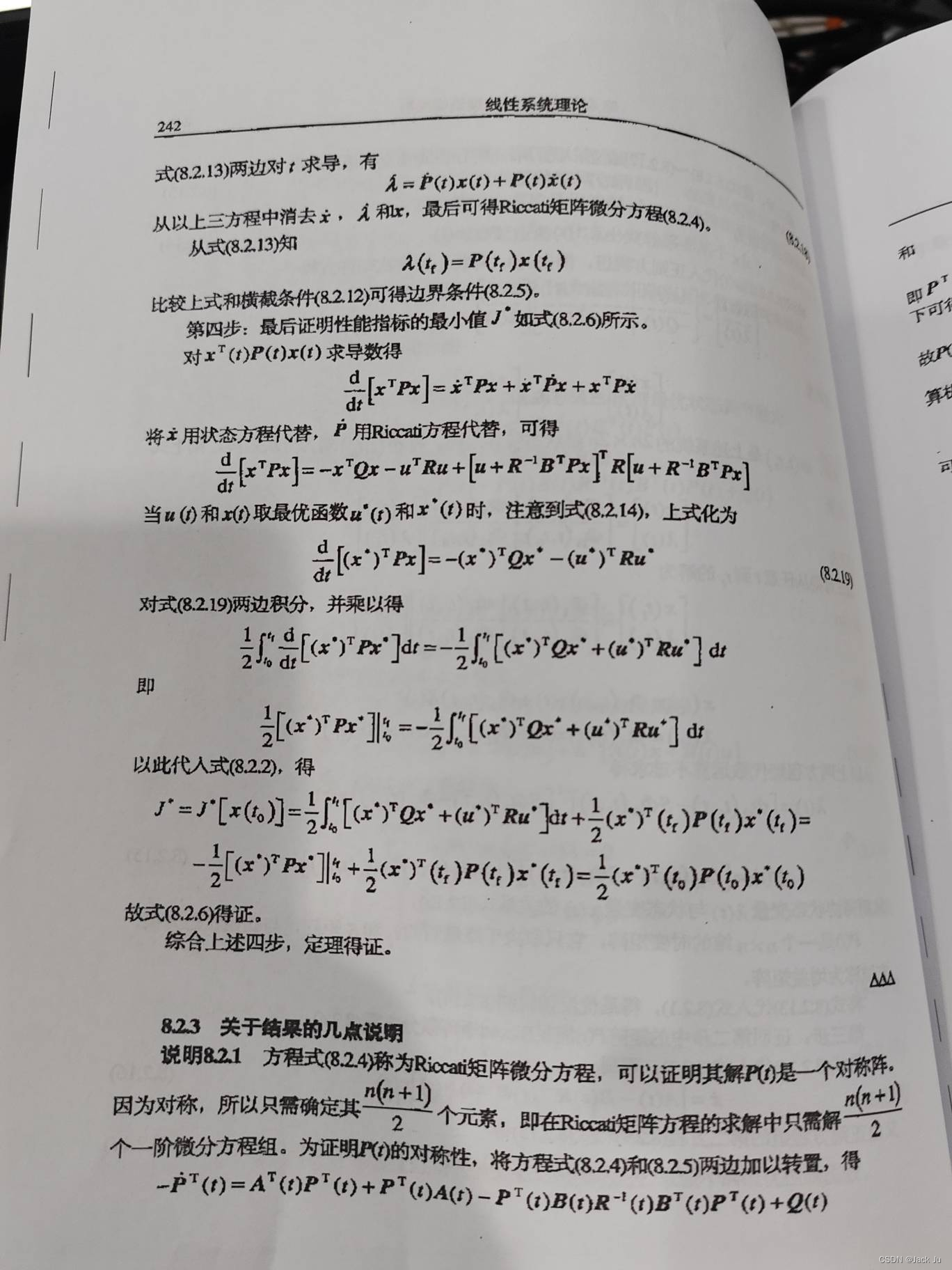
2. Proof of Riccati Equation for Continuous System
笔者针对于连续系统得黎卡提方程进行了推导证明。
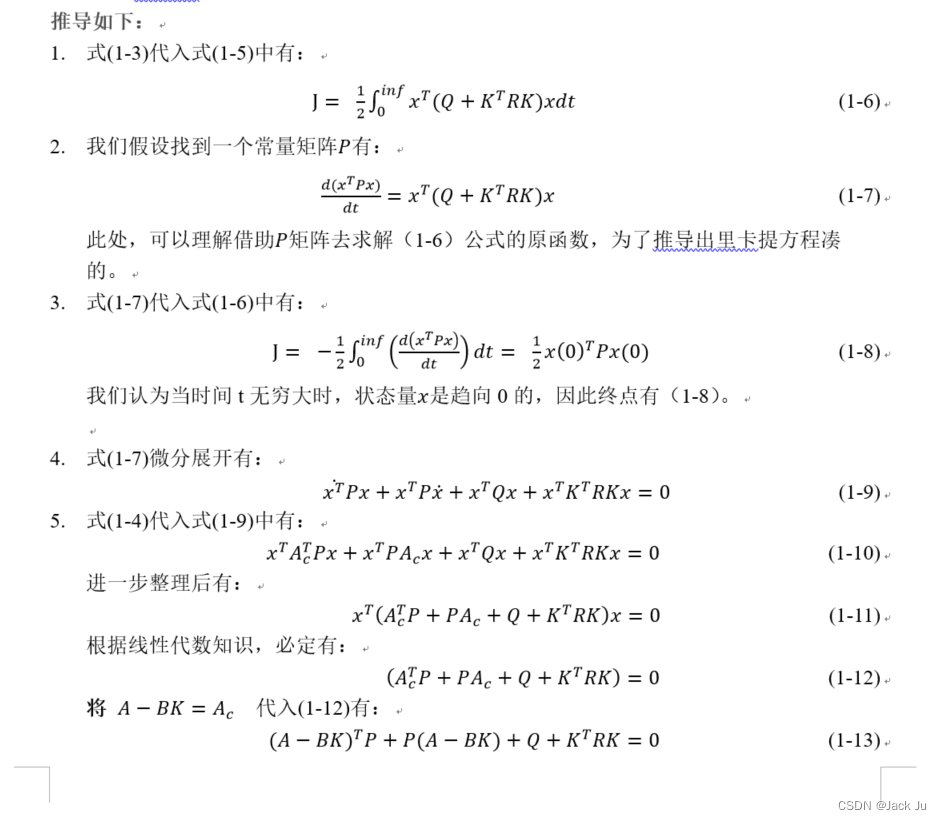
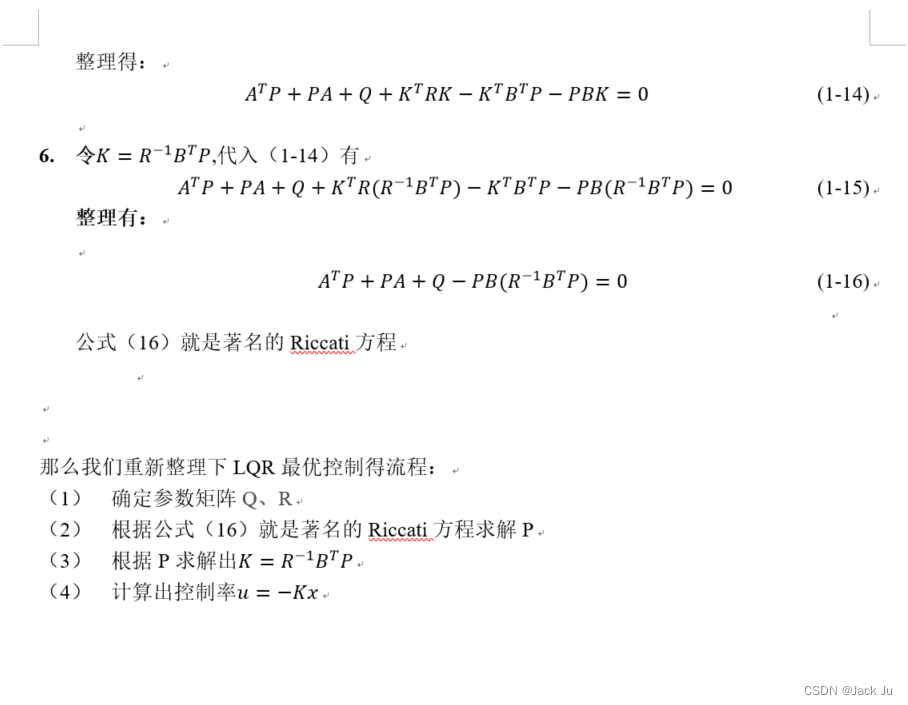
关于证明过程,其实可以理解为为了证明这个里卡提方程,去拼凑,然后证明出这个结论。
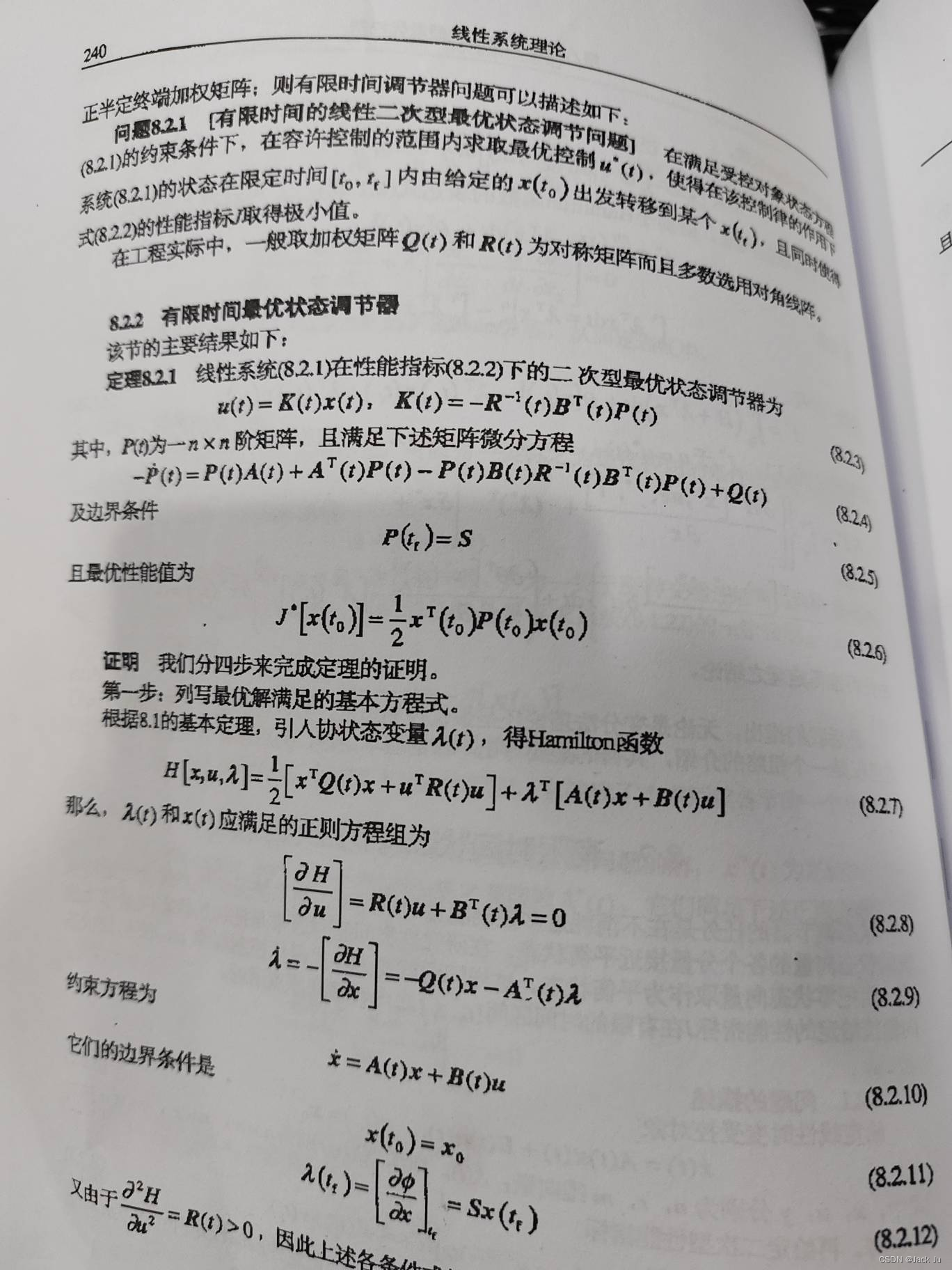
以上连续系统的证明有问题,参考如下的证明
求解P的例子:
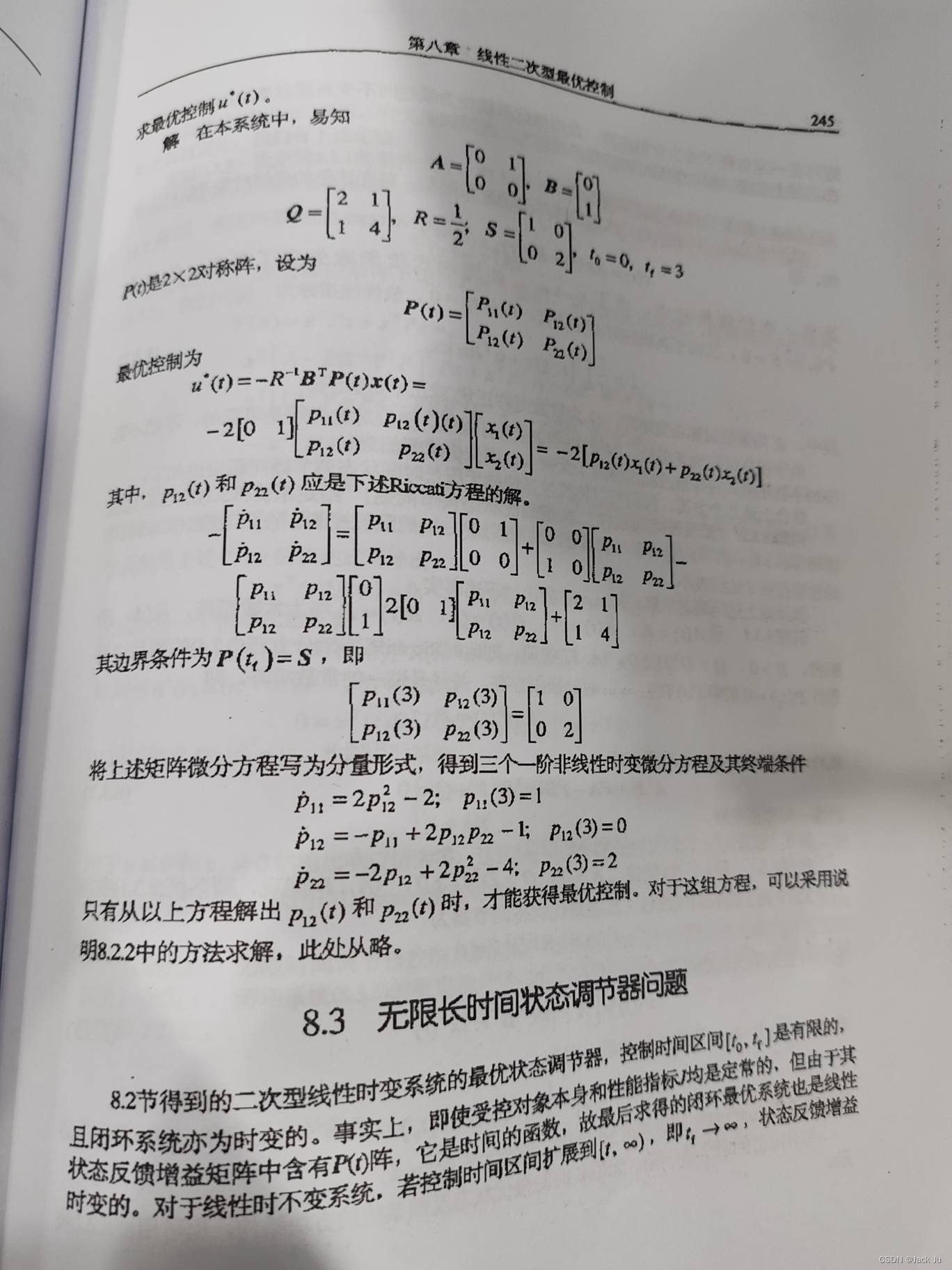
考虑到实际系统都是离散系统,还需证明离散系统得里卡提方程,参见我另一篇文章自动驾驶——离散LQR的黎卡提方程Riccati公式推导与LQR工程化。
3. Rerfenece
20230501
鞠春宇
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/369340
推荐阅读
相关标签

