
- 1HTML+CSS项目实战_html/css项目实践
- 2探索NVIDIA的TRT-LLM-RAG-Windows:一款高效的自然语言处理工具
- 3MySQL事务,MVCC,undo log,redo log——最全总结!_mysql mvcc undolog redolog
- 4IDEA 宝贝插件
- 5获取详情API接口(抖音)_抖音api接口文档
- 6java.lang.IllegalArgumentException: Unrecognized Hadoop major version number: 3.0.0-cdh6.3.2_caused by: java.lang.illegalargumentexception: unr
- 7调试技巧-C语言_c语言可以查看运行过的代码吗
- 8船新的100个Python项目,看了再学毕竟快乐总是一闪而过_船舶工程学python可以做什么
- 9python进行文本分词_【语言处理与Python】3.7用正则表达式为文本分词
- 10Git 保姆级使用教程_git保姆级教程
STM32系列——串口收发数据基础_stm32串口接收数据
赞
踩
串行接口相关知识
两种通信方式:并行通信与串行通信,并行通信传输速度快但是占用的引脚资源多,串行通信传输速度慢但是占用的引脚资源少。
三种模式:单工、半双工、全双工
异步串行通信:通信双方在没有同步时钟的前提下,将一个字符(包括特定的附加位)按位进行传输的通信方式。
波特率:每秒钟传输的二进制位数,如9600bps。
串口<--------->USB接口:CH340 CP2012
STM32芯片的串口UASRT功能十分强大,但对于日常编程而言,使用最多的还是异步串行通信。
USART1_TX与PA9复用,USART1_RX与PA10复用。
USART2_TX与PA2复用,USART2_RX与PA3复用。
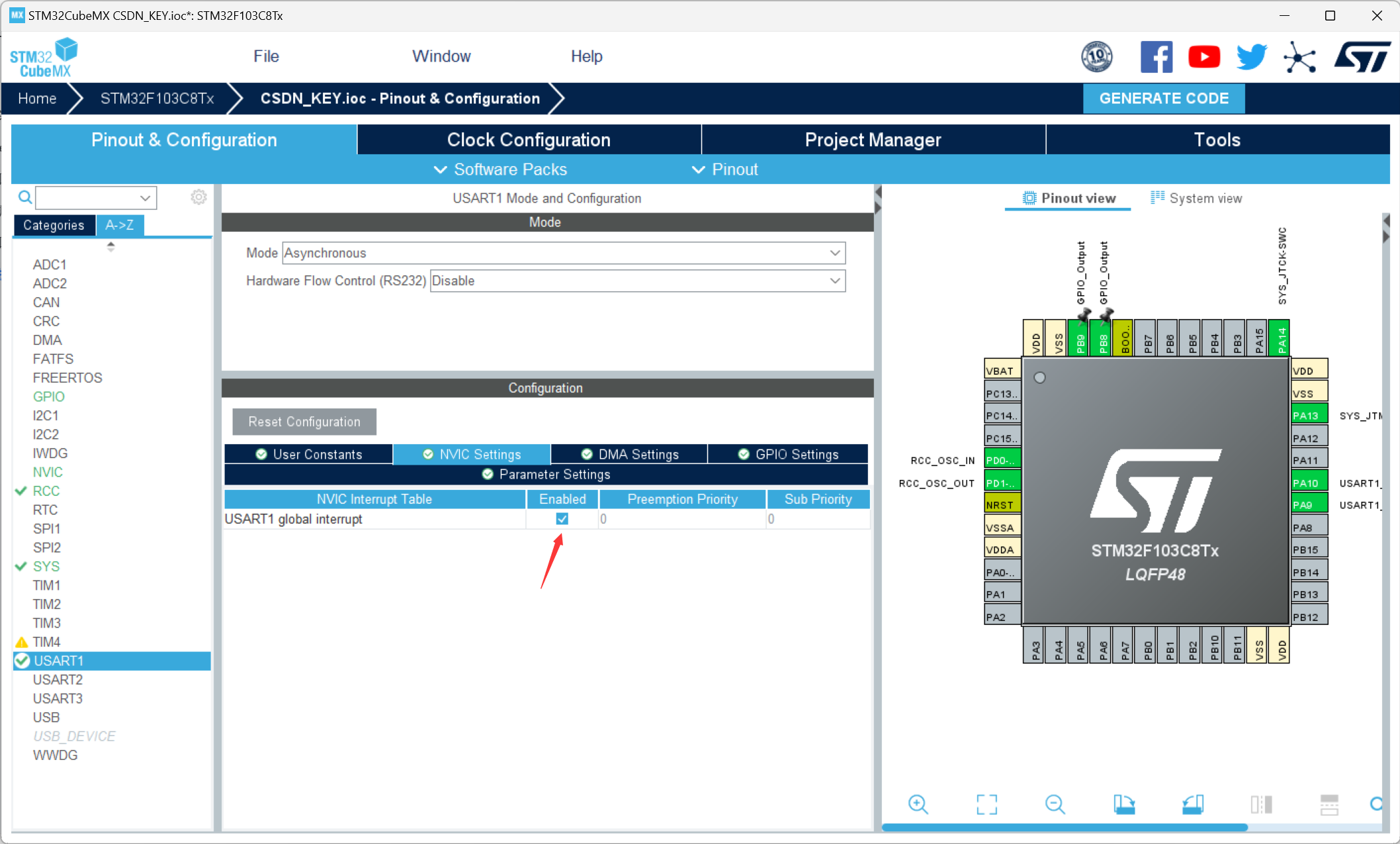
STM32CubeMX中关于USART的配置

注意:(1)Mode模式设置为异步通信;(2)波特率配置要与上位机选择的一致;
HAL库中串口发送的重要函数(重点)
阻塞式发送函数(串口数据发送完以后,单片机才能执行下一步程序,一般串口需要发送的数据也不多,等他发完也不会花太多时间,所以其影响可忽略不计)
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
四个参数:使用哪个串口;需要发送的数据(是字符串还是字节获数组);数据大小;设定的发送时间;
非阻塞式发送函数(串口发送数据,不需要等待发送完数据,单片机能执行下一步程序,一般用于串口需要发送很长的数据的情况)待串口将数据发送完以后,回调对应中断服务函数。
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
发送完毕中断回调函数
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart);
串口发送数据实例
使用非阻塞式的串口发送函数,将发送缓数组dat_Txd中的前5个数据发送到USART1,在数据发送完成后,翻转PB9引脚的输出电平。
- HAL_UART_Transmit_IT(&huart1,&dat_Txd,5);//调用非阻塞式的串口发送函数
- void HAL_UART_TxCpltCalback(UART_HandleTypeDef *huart)//发送完毕中断回调函数
- {
- if(huart->Instance == USART1)//判断是否为串口1
- {
- HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
- }
- }
补充:使用阻塞式的串口发送函数怎么写代码?
- HAL_UART_Transmit(&huart1, &dat_Txd, 5, 10000);
- HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
HAL库中串口接收的重要函数(重点)
阻塞式接收函数(不推荐使用,一般不知道什么时候能够接受到数据,单片机不可能一直不工作只为等着接收数据)
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
非阻塞式接收函数(推荐使用)
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
接收完毕中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
串口接收数据实例
使用非阻塞式的串口接收函数,接收USART1的一个字节,将其保存在变量dat_Txd中,在数据接收完成后若该字节为0x5A,翻转PB8引脚的输出电平。
- HAL_UART_Receive_IT(&huart1,&dat_Rxd,1);//调用非阻塞式的串口发送函数
- void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
- {
- if(huart->Instance == USART1)//判断是否为串口1
- {
- if(huart->Instance == USART1)
- {
- if(dat_Rxd == 0x5A)
- HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8);
- }
- }
- }
综合实训
在STM32F103C8T6开发板上,连接相关外电路, 还需要一个串口,利用STM32CubeMX和Keil5协同开发,完成以下的功能。
【1】开机后,向串口1发送“hello world ! ”。
【2】串口1收到字节指令“OxA1”,PB9输出高电平,发送“LED1 Open ! ”。
【3】串口1收到字节指令“OxA2”,PB9输出低电平,发送“LED1 Closed! ”。
【4】在串口发送过程中,翻转PB8作为发送数据指示灯。
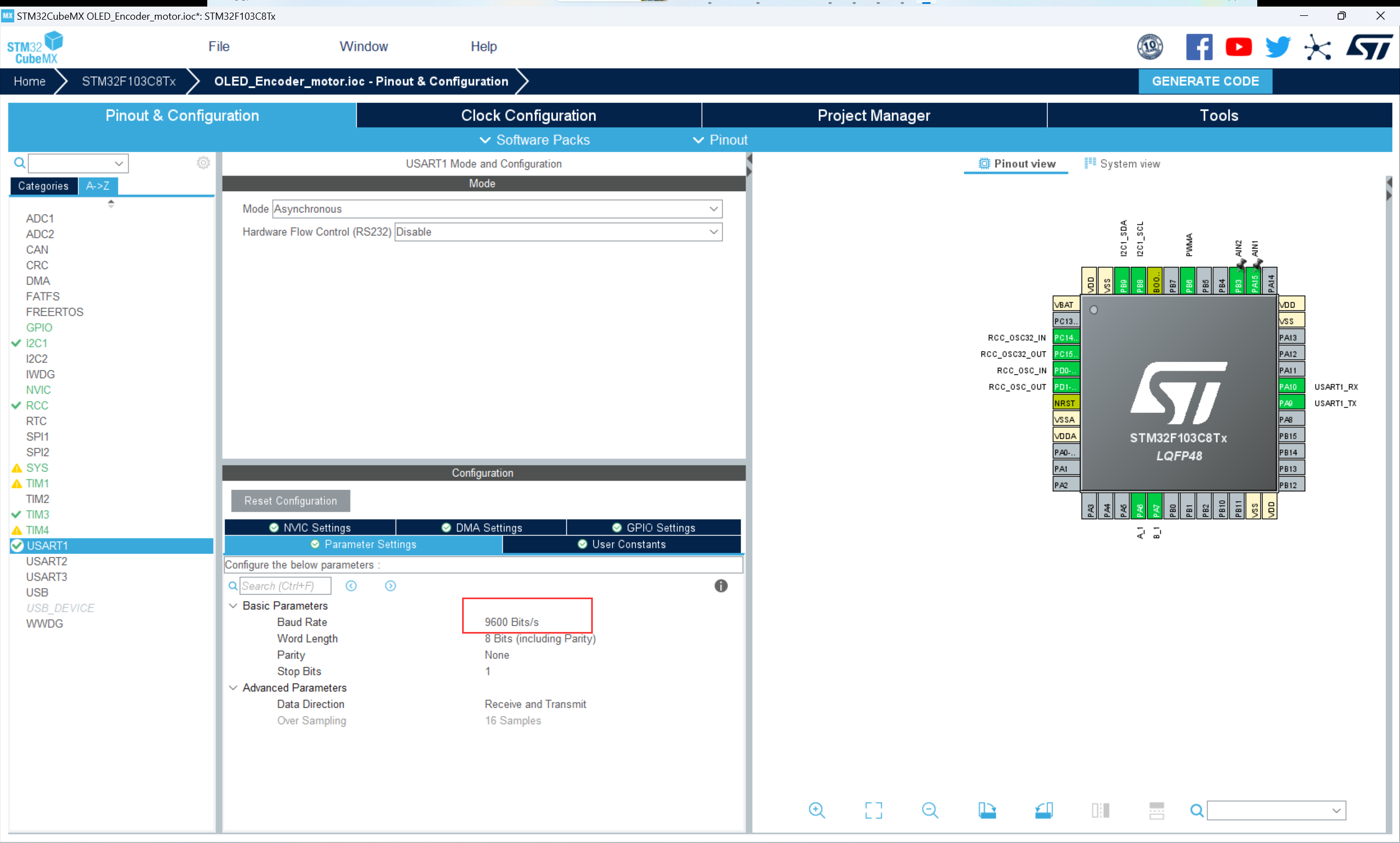
(1)cubmx配置
在本文第2点关于USART的配置基础下勾选中断,并将波特率修改为9600。
(2)Keil5编写代码

- /* USER CODE BEGIN 2 */
- LED2_ON();
- HAL_UART_Transmit(&huart1,Tx_str1,sizeof(Tx_str1),10000);
- LED2_OFF();
-
- HAL_UART_Receive_IT(&huart1,&RX_dat,1);
- /* USER CODE END 2 */

