
热门标签
热门文章
- 1模电学习笔记(3)_模电中ubq和ubeq
- 2当运行深度学习网络出现cuda out of memory错误:_cuda oom
- 3Kafka科普系列 | 什么是LSO?_kafka lso
- 4[回忆]2007年的GDNT研发广东北电辞职信._广东北电通信设备有限公司
- 5Solidity实现智能合约——Solidity高级理论(三)_智能合约& 线上 ide 实现 solidity 合约
- 6【2023】kafka入门学习与使用(kafka-2)
- 7手把手做一个公众号GPT智能客服(七)GPT 接入微信机器人_gpt接入企业微信客服
- 8NLP-预训练模型:综述【基础:BERT】【预训练任务优化:ERNIE、SpanBERT】【训练方法优化:RoBERTa、T5】【模型结构优化:XLNet、ALBERT、ELECTRA】【模型轻量化】_t5, roberta, albert,bert,transformer,macbert区别
- 9python列表求平均值函数_计算给定列表中所有元素的平均值(定义一个函数)
- 10PyTorch深度学习入门笔记(八)神经网络的基本骨架 nn.Module的使用_class net(torch.nn.module)
当前位置: article > 正文
【STM32】超声波传感器HC-SR04知识_hc-sr04超声波传感器
作者:小蓝xlanll | 2024-04-08 03:39:00
赞
踩
hc-sr04超声波传感器
一、超声波HC_SR04简介
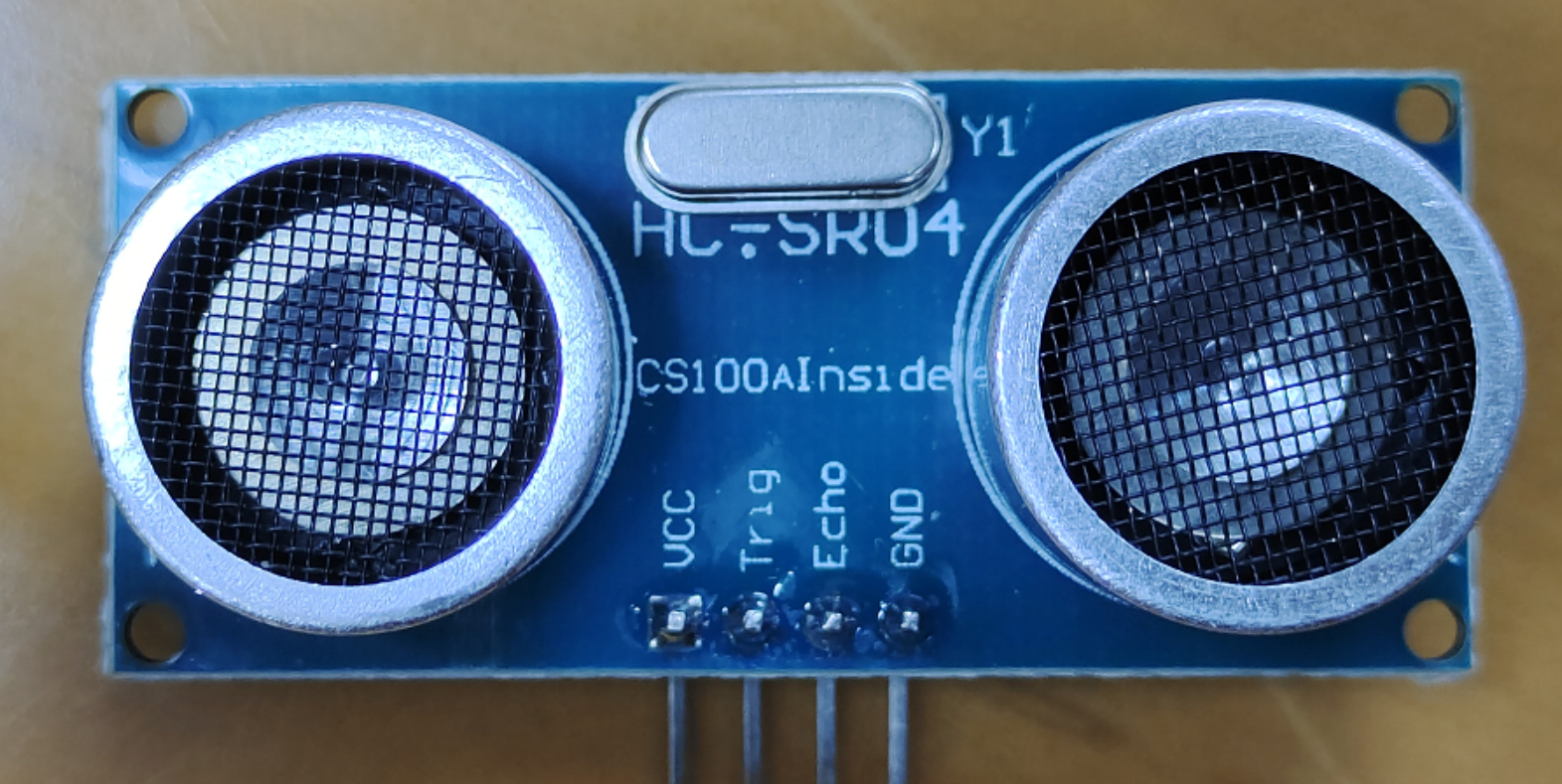
超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。
电路板上有四个引脚:VCC、GND、Trig(触发)、Echo(回应)。
工作电压与电流:5V,15mA
感应距离:2~400cm
感测角度:不小于15度
被测物体的面积不要小于50平方厘米并且尽量平整
具备温度补偿电路
二、超声波原理
距离公式:
高电平持续时间*声速(340m/s)/2

三、超声波测距步骤
- 配置GPIO引脚结构体(Trig,Echo)
- 配置定时器4结构体
- 配置定时器4中断结构体
- 开启时钟(定时器、GPIO)
- Trig引脚输出高电平(10us以上),然后关闭
- 等待Echo引脚输出高电平开始,定时器打开->开启计数器计数
- 等待Echo引脚输出高电平结束,定时器关闭->停止计数器计数
四、硬件接线
- GND——GND
- VCC——5V
- Trig——PB11
- Echo——PB10
五、模块化程序
- #ifndef __SYS_H
- #define __SYS_H
- #include "stm32f10x.h"
-
-
- #define SYSTEM_SUPPORT_UCOS 0
-
- #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
- #define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
- #define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
-
- #define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
- #define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
- #define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
- #define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
- #define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
- #define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
- #define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
-
- #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
- #define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
- #define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
- #define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
- #define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
- #define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
- #define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
-
-
- #define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
- #define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë
-
- #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
- #define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë
-
- #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
- #define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë
-
- #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
- #define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë
-
- #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
- #define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë
-
- #define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
- #define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë
-
- #define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
- #define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë
-
-
-
- void NVIC_Configuration(void);
-
-
-
- #endif

- #include "sys.h"
- #include "stm32f10x.h"
-
- void NVIC_Configuration(void)
- {
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
-
- }
- #include "hc.h"
- #include "Delay.h"
-
- #define HCSR04_PORT GPIOB
- #define HCSR04_CLK RCC_APB2Periph_GPIOB
- #define HCSR04_TRIG GPIO_Pin_11
- #define HCSR04_ECHO GPIO_Pin_10
-
- u16 msHcCount = 0;
-
- void HC_Init(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE);
-
- GPIO_InitStructure.GPIO_Pin =HCSR04_TRIG;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
- GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG);
-
- GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
- GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO);
-
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
-
- TIM_DeInit(TIM2);
- TIM_TimeBaseStructure.TIM_Period = (1000-1);
- TIM_TimeBaseStructure.TIM_Prescaler =(72-1);
- TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
-
- TIM_ClearFlag(TIM4, TIM_FLAG_Update);
- TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);
-
- NVIC_InitTypeDef NVIC_InitStructure;
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
-
- NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
-
- TIM_Cmd(TIM4,DISABLE);
- }
-
-
-
- static void OpenTimerForHc()
- {
- TIM_SetCounter(TIM4,0);
- msHcCount = 0;
- TIM_Cmd(TIM4, ENABLE);
- }
-
-
- static void CloseTimerForHc()
- {
- TIM_Cmd(TIM4, DISABLE);
- }
-
-
- void TIM4_IRQHandler(void)
- {
- if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET)
- {
- TIM_ClearITPendingBit(TIM4, TIM_IT_Update );
- msHcCount++;
- }
- }
-
-
-
- u32 GetEchoTimer(void)
- {
- u32 t = 0;
- t = msHcCount*1000;
- t += TIM_GetCounter(TIM4);
- TIM4->CNT = 0;
- Delay_ms(50);
- return t;
- }
-
- float HC_Get(void )
- {
- int t = 0;
- int i = 0;
- float lengthTemp = 0;
- float sum = 0;
- while(i!=5)
- {
- TRIG_Send = 1;
- Delay_us(20);
- TRIG_Send = 0;
- while(ECHO_Reci == 0);
- OpenTimerForHc();
- i = i + 1;
- while(ECHO_Reci == 1);
- CloseTimerForHc();
- t = GetEchoTimer();
- lengthTemp = ((float)t/58.0);//cm
- sum = lengthTemp + sum ;
-
- }
- lengthTemp = sum/5.0;
- return lengthTemp;
- }
- #ifndef __HC_H
- #define __HC_H
- #include "sys.h"
-
- void HC_Init(void);
- static void OpenTimerForHc(void);
- static void CloseTimerForHc(void);
- void TIM4_IRQHandler(void);
- u32 GetEchoTimer(void);
- float HC_Get(void );
-
- #define TRIG_Send PBout(11)
- #define ECHO_Reci PBin(10)
- #endif
- #include "stm32f10x.h" // Device header
- #include "Delay.h"
- #include "OLED.h"
- #include "HC.h"
-
- uint32_t Length;
- float length;
-
-
- int main(void)
- {
-
- OLED_Init();
- OLED_ShowString(1,1,"Length:");
- OLED_ShowString(2,10,"cm");
- HC_Init();
-
- while(1)
- {
- length =HC_Get();
- Length = length*100; //eg:54.25->5425
- OLED_ShowNum(2,4,Length/1000,1); // 千
- OLED_ShowNum(2,5,Length%1000/100,1); //百
- OLED_ShowString(2,6,".");
- OLED_ShowNum(2,7,Length%100/10,1); //十
- OLED_ShowNum(2,8,Length%10/1,1); //个
-
- }
- }
推荐阅读
![[蓝桥杯嵌入式]hal库 stm32 PWM的使用(随时修改占空比,随时修改频率)](https://img-blog.csdnimg.cn/direct/ee42de64b0f14932bd12cd666ec76ff4.png?x-oss-process=image/resize,m_fixed,h_300,image/format,png)
相关标签

