- 1使用brew安装mysql后找不到my.cnf文件
- 2Git - Gerrit ssh配置_本地配置girret公钥
- 3OutfitAnyone_outfit anyone源码
- 4使用哈希表(散列表)+顺序二叉树实现电话簿系统(手把手讲解)_利用哈希表制作通讯录
- 5远程连接MYSQL提示Host is not allowed to connect to this MySQL server_error 1130 (hy000): host 'ctl-74' is not allowed t
- 6ROS知识点——消息过滤器 ( message_filters)_基于策略的同步器 policy-based synchronizer
- 7考研词汇 用语言记忆
- 8Java17的stream流里toList和.collect(Collectors.toList())有什么不同
- 9顶像滑块/通用滑块识别/文字点选/图标点选/推理/OCR文字识别_顶像 api
- 10MongoDB数据库常用命令操作_mongodb查看所有数据库命令
【51单片机快速入门指南】4.3: I2C读取MPU6050陀螺仪的原始数据_51单片机读取mpu6050角度
赞
踩
普中51-单核-A2
STC89C52
Keil uVision V5.29.0.0
PK51 Prof.Developers Kit Version:9.60.0.0
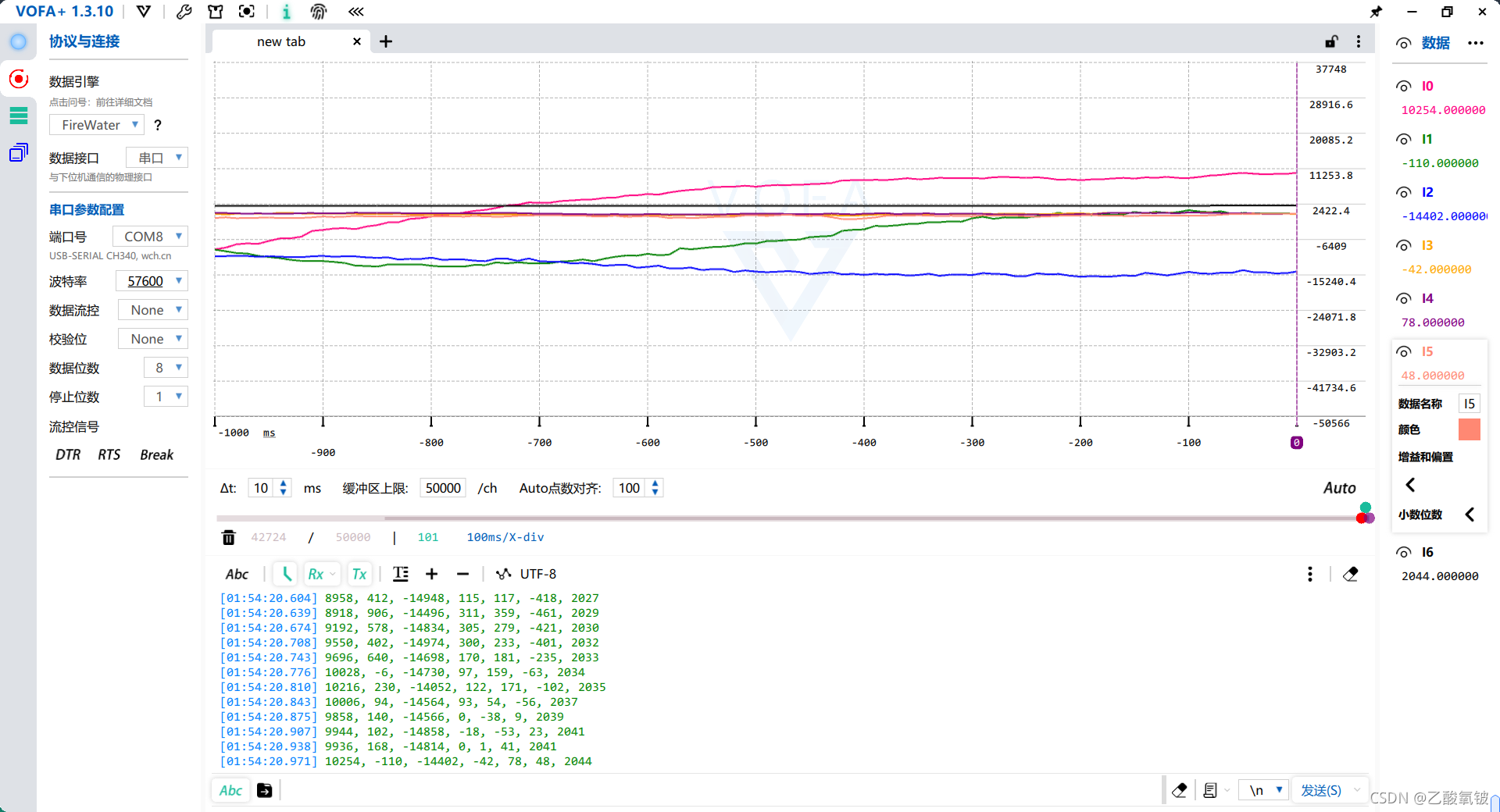
串口示波器:Vofa+ 1.3.10
硬知识
摘自《ATK-MPU6050六轴传感器模块用户手册_V1.0》
特性参数
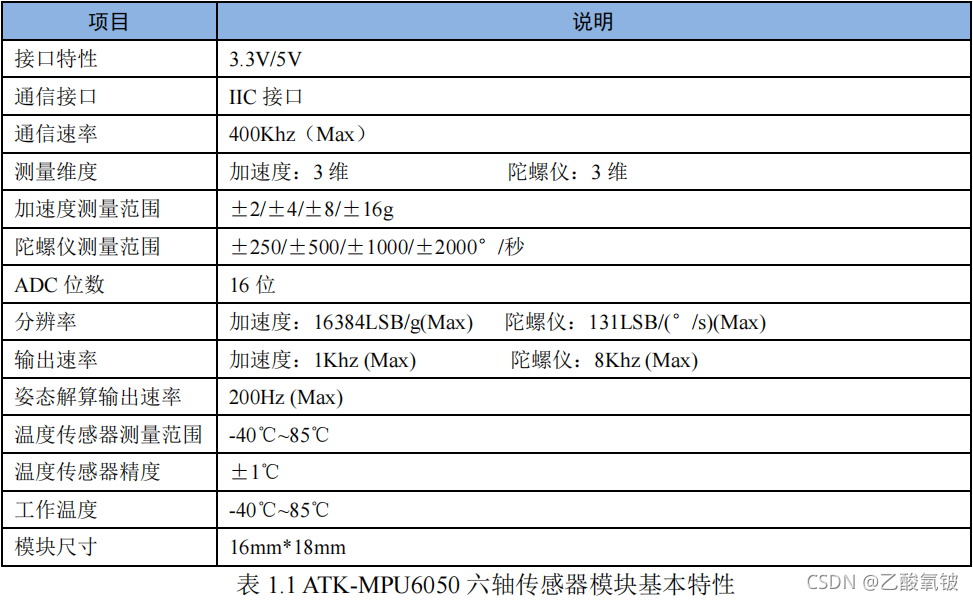

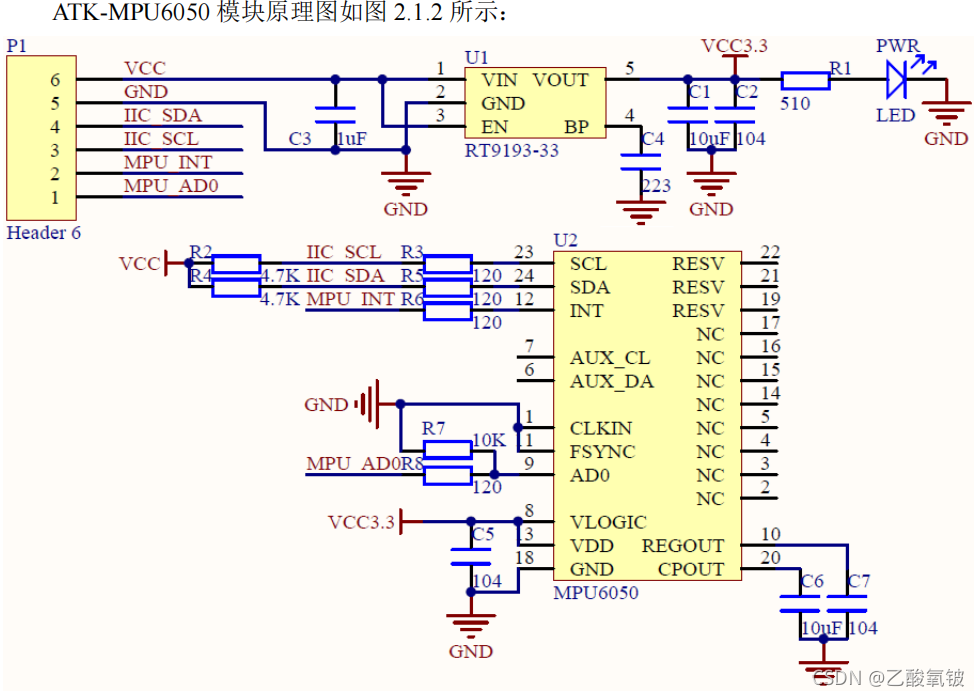
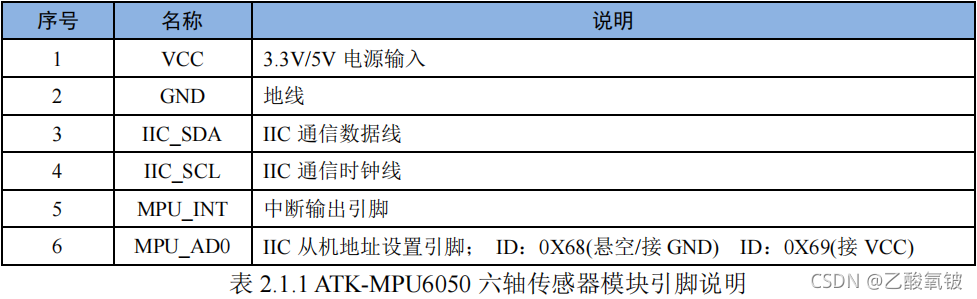
模块自带了 3.3V 超低压差稳压芯片,给 MPU6050 供电,因此外部供电可以选择:3.3V / 5V 都可以。模块通过 P1 排针与外部连接,引出了 VCC、GND、IIC_SDA、IIC_SCL、MPU_INT 和 MPU_AD0 等信号,其中,IIC_SDA 和 IIC_SCL 带了 4.7K上拉电阻,外部可以不用再加上拉电阻了,另外 MPU_AD0 自带了 10K 下拉电阻,当 AD0悬空时,默认 IIC 地址为(0X68)。
MPU6050 简介
该模块采用InvenSense 公司的 MPU6050 芯片作为核心,该芯片内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并可利用自带的数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主 IIC 接口,向应用端输出姿态解算后的数据。有了 DMP,我们可以使用 InvenSense 公司提供的运动处理资料库,非常方便的实现姿态解算,降低了运动处理运算对操作系统的负荷,同时大大降低了开发难度。
MPU6050 的特点包括:
① 以数字形式输出 6 轴或 9 轴(需外接磁传感器)的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据(需 DMP 支持)
② 具有 131 LSBs/°/sec 敏感度与全格感测范围为±250、±500、±1000 与±2000°/sec 的 3 轴角速度感测器(陀螺仪)
③ 集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器
④ 移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移
⑤ 自带数字运动处理(DMP: Digital Motion Processing)引擎可减少 MCU 复杂的融合演算数据、感测器同步化、姿势感应等的负荷
⑥ 内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求
⑦ 自带一个数字温度传感器
⑧ 带数字输入同步引脚(Sync pin)支持视频电子影相稳定技术与 GPS
⑨ 可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、high-G 中断、零动作感应、触击感应、摇动感应功能
⑩ VDD 供电电压为 2.5V±5%、3.0V±5%、3.3V±5%;VLOGIC 可低至 1.8V± 5%
⑪ 陀螺仪工作电流:5mA,陀螺仪待机电流:5uA;加速器工作电流:500uA,加速
器省电模式电流:40uA@10Hz
⑫ 自带 1024 字节 FIFO,有助于降低系统功耗
⑬ 高达 400Khz 的 IIC 通信接口
⑭ 超小封装尺寸:4x4x0.9mm(QFN)
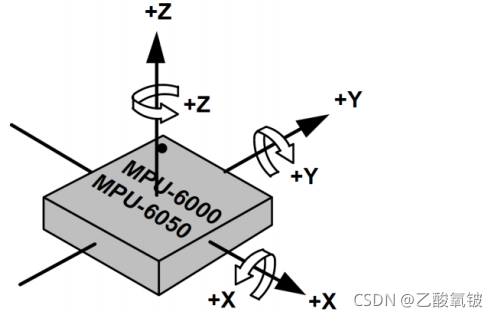
MPU6050 传感器的检测轴如图 2.2.1 所示:
MPU6050 的内部框图如图 2.2.2 所示:
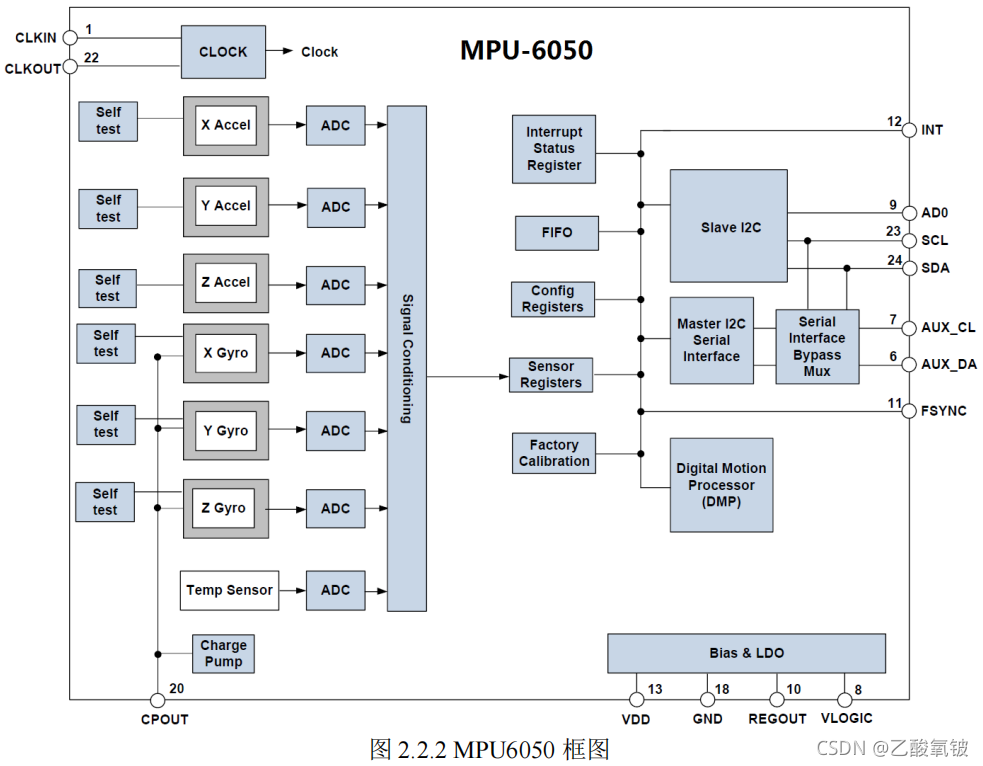
其中,SCL 和 SDA 是连接 MCU 的 IIC 接口,MCU 通过这个 IIC 接口来控制 MPU6050,另外还有一个 IIC 接口:AUX_CL 和 AUX_DA,这个接口可用来连接外部从设备,比如磁传感器,这样就可以组成一个九轴传感器。VLOGIC 是 IO 口电压,该引脚最低可以到 1.8V,我们一般直接接 VDD 即可。AD0 是从 IIC 接口(接 MCU)的地址控制引脚,该引脚控制IIC 地址的最低位。如果接 GND,则 MPU6050 的 IIC 地址是:0X68,如果接 VDD,则是0X69,注意:这里的地址是不包含数据传输的最低位的(最低位用来表示读写)!!
模块重要寄存器简介
电源管理寄存器 1

其中,DEVICE_RESET 位用来控制复位,设置为 1,复位 MPU6050,复位结束后,MPU硬件自动清零该位。SLEEEP 位用于控制 MPU6050 的工作模式,复位后,该位为 1,即进入了睡眠模式(低功耗),所以我们要清零该位,以进入正常工作模式。TEMP_DIS 用于设置是否使能温度传感器,设置为 0,则使能。最后 CLKSEL[2:0]用于选择系统时钟源,选择关系如表 2.3.1 所示:
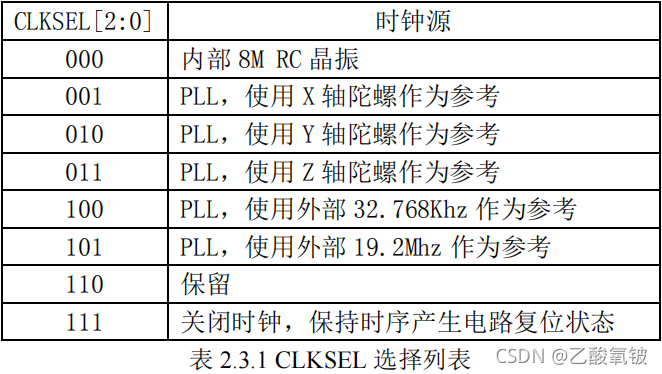
默认是使用内部 8M RC 晶振的,精度不高,所以我们一般选择 X/Y/Z 轴陀螺作为参考的 PLL 作为时钟源,一般设置 CLKSEL=001 即可。
陀螺仪配置寄存器

该寄存器我们只关心 FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围:0,±250°/S;1,±500°/S;2,±1000°/S;3,±2000°/S ;我们一般设置为 3,即±2000°/S,因为陀螺仪的 ADC 为 16 位分辨率,所以得到灵敏度为:65536/4000= 16.4 LSB/(°/S)。
加速度传感器配置寄存器

该寄存器我们只关心 AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围:0, ±2g;1,±4g;2,±8g;3,±16g;我们一般设置为 0,即±2g,因为加速度传感器的ADC 也是 16 位,所以得到灵敏度为:65536/4= 16384 LSB/g。
FIFO 使能寄存器

该寄存器用于控制 FIFO 使能,在简单读取传感器数据的时候,可以不用 FIFO,设置对应位为 0 即可禁止 FIFO,设置为 1,则使能 FIFO。注意加速度传感器的 3 个轴,全由 1个位(ACCEL_FIFO_EN)控制,只要该位置 1,则加速度传感器的三个通道都开启 FIFO了。
陀螺仪采样率分频寄存器

该寄存器用于设置 MPU6050 的陀螺仪采样频率,计算公式为:
采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)
这里陀螺仪的输出频率,是 1Khz 或者 8Khz,与数字低通滤波器(DLPF)的设置有关,当 DLPF_CFG=0/7 的时候,频率为 8Khz,其他情况是 1Khz。而且 DLPF 滤波频率一般设置为采样率的一半。采样率,我们假定设置为 50Hz,那么 SMPLRT_DIV=1000/50-1=19。
配置寄存器

这里,我们主要关心数字低通滤波器(DLPF)的设置位,即:DLPF_CFG[2:0],加速度计和陀螺仪,都是根据这三个位的配置进行过滤的。DLPF_CFG 不同配置对应的过滤情况如表 2.3.2 所示:
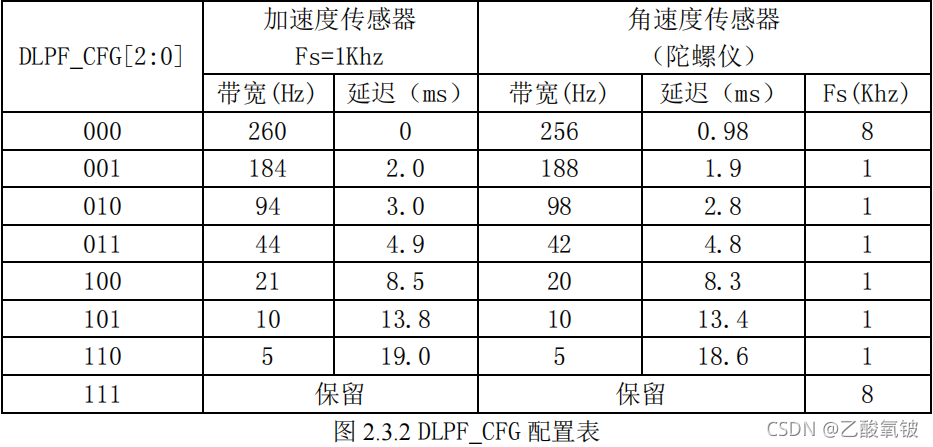
这里的加速度传感器,输出速率(Fs)固定是 1Khz,而角速度传感器的输出速率(Fs),则根据 DLPF_CFG 的配置有所不同。一般我们设置角速度传感器的带宽为其采样率的一半,如前面所说的,如果设置采样率为 50Hz,那么带宽就应该设置为 25Hz,取近似值 20Hz,就应该设置 DLPF_CFG=100。
电源管理寄存器 2

该寄存器的 LP_WAKE_CTRL 用于控制低功耗时的唤醒频率。剩下的 6 位,分别控制加速度和陀螺仪的 x/y/z 轴是否进入待机模式,这里我们全部都不进入待机模式,所以全部设置为 0 即可。
陀螺仪数据输出寄存器
总共有 8 个寄存器组成,地址为:0x43~0x48,
通过读取这 8 个寄存器,就可以读到陀螺仪 x/y/z 轴的值,比如 x 轴的数据,可以通过读取0X43(高 8 位)和 0X44(低 8 位)寄存器得到,其他轴以此类推。
加速度传感器数据输出寄存器
也有 8 个,地址为:0x3B~0x40
通过读取这 8个寄存器,就可以读到加速度传感器 x/y/z 轴的值,比如读 x 轴的数据,可以通过读取 0X3B(高 8 位)和 0X3C(低 8 位)寄存器得到,其他轴以此类推。
温度传感器
可以通过读取 0x41(高 8 位)和 0x42(低 8 位)寄存器得到,温度换算公式为:
T
e
m
p
e
r
a
t
u
r
e
=
36.53
+
r
e
g
v
a
l
/
340
Temperature = 36.53 + regval/340
Temperature=36.53+regval/340
其中,Temperature 为计算得到的温度值,单位为℃,regval 为从 0x41 和 0x42 读到的温度传感器值。
示例程序
移植自正点原子ATK-MPU6050六轴传感器例程。
软件I2C程序见【51单片机快速入门指南】4: 软件 I2C
stdint.h见【51单片机快速入门指南】1:基础知识和工程创建
串口部分见【51单片机快速入门指南】3.3:USART 串口通信
MPU6050.c
#include "MPU6050.h" #include "./Software_I2C/Software_I2C.h" void Delay1ms(); //@11.0592MHz void MPU_Delay_Ms(uint16_t Milliseconds) //移植时需修改 { while(Milliseconds--) Delay1ms(); } //IIC连续写 //reg:要写入的寄存器地址 //len:要写入的长度 //buf:要写入的数据的首地址 //返回值:0,正常 // 其他,错误代码 uint8_t MPU_Write_Len(uint8_t reg, uint8_t len, uint8_t *buf) { return i2c_mem_write(MPU_ADDR, reg, buf, len); } //IIC连续读 //reg:要读取的寄存器地址 //len:要读取的长度 //buf:读取到的数据存储区 //返回值:0,正常 // 其他,错误代码 uint8_t MPU_Read_Len(uint8_t reg, uint8_t len, uint8_t *buf) { return i2c_mem_read(MPU_ADDR, reg, buf, len); } //IIC写一个字节 //reg:寄存器地址 //Data:数据 //返回值:0,正常 // 其他,错误代码 uint8_t MPU_Write_Byte(uint8_t reg, uint8_t Data) { return i2c_mem_write(MPU_ADDR, reg, &Data, 1); } //IIC读一个字节 //reg:寄存器地址 //返回值:读到的数据 uint8_t MPU_Read_Byte(uint8_t reg) { uint8_t res; i2c_mem_read(MPU_ADDR, reg, &res, 1); return res; } //写入8位寄存器的一个位 uint8_t MPU_Write_Bit(uint8_t addr, uint8_t bitNum, uint8_t Data) { return i2c_write_bit(MPU_ADDR, addr, bitNum, Data); } //写入8位寄存器的多个位 uint8_t MPU_Write_Bits(uint8_t addr, uint8_t bitStart, uint8_t length, uint8_t Data) { return i2c_write_bits(MPU_ADDR, addr, bitStart, length, Data); } //读取一个位从8位器件的寄存器 uint8_t MPU_Read_Bit(uint8_t addr, uint8_t bitNum, uint8_t *Data) { return i2c_read_bit(MPU_ADDR, addr, bitNum, Data); } //读取8位寄存器的多个位 uint8_t MPU_Read_Bits(uint8_t addr, uint8_t bitStart, uint8_t length, uint8_t *Data) { return i2c_read_bits(MPU_ADDR, addr, bitStart, length, Data); } // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK NANO STM32F103开发板 //MPU6050 驱动代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2018/7/28 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 208-2028 //All rights reserved // //初始化MPU6050 //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Init(void) { uint8_t res; MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X80); //复位MPU6050 MPU_Delay_Ms(100); MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X00); //唤醒MPU6050 MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps MPU_Set_Accel_Fsr(0); //加速度传感器,±2g MPU_Set_Rate(50); //设置采样率50Hz MPU_Write_Byte(MPU_INT_EN_REG, 0X01); //使能数据就绪中断 MPU_Write_Byte(MPU_USER_CTRL_REG, 0X00); //I2C主模式关闭 MPU_Write_Byte(MPU_FIFO_EN_REG, 0X00); //关闭FIFO MPU_Write_Byte(MPU_INTBP_CFG_REG, 0X80); //INT引脚低电平有效 res = MPU_Read_Byte(MPU_DEVICE_ID_REG); if (res == MPU_ADDR)//器件ID正确 { MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X01); //设置CLKSEL,PLL X轴为参考 MPU_Write_Byte(MPU_PWR_MGMT2_REG, 0X00); //加速度与陀螺仪都工作 MPU_Set_Rate(200); //设置采样率为200Hz } else return 1; return 0; } //设置MPU6050陀螺仪传感器满量程范围 //fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr) { return MPU_Write_Byte(MPU_GYRO_CFG_REG, fsr << 3);//设置陀螺仪满量程范围 } //设置MPU6050加速度传感器满量程范围 //fsr:0,±2g;1,±4g;2,±8g;3,±16g //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Accel_Fsr(uint8_t fsr) { return MPU_Write_Byte(MPU_ACCEL_CFG_REG, fsr << 3);//设置加速度传感器满量程范围 } //设置MPU6050的数字低通滤波器 //lpf:数字低通滤波频率(Hz) //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_LPF(uint16_t lpf) { uint8_t Data = 0; if (lpf >= 188)Data = 1; else if (lpf >= 98)Data = 2; else if (lpf >= 42)Data = 3; else if (lpf >= 20)Data = 4; else if (lpf >= 10)Data = 5; else Data = 6; return MPU_Write_Byte(MPU_CFG_REG, Data);//设置数字低通滤波器 } //设置MPU6050的采样率(假定Fs=1KHz) //rate:4~1000(Hz) //返回值:0,设置成功 // 其他,设置失败 uint8_t MPU_Set_Rate(uint16_t rate) { uint8_t Data; if (rate>1000)rate = 1000; if (rate<4)rate = 4; Data = 1000 / rate - 1; Data = MPU_Write_Byte(MPU_SAMPLE_RATE_REG, Data); //设置数字低通滤波器 return MPU_Set_LPF(rate / 2); //自动设置LPF为采样率的一半 } //得到温度值 //返回值:温度值(扩大了100倍) short MPU_Get_Temperature(void) { uint8_t buf[2]; short raw; float temp; MPU_Read_Len(MPU_TEMP_OUTH_REG, 2, buf); raw = ((uint16_t)buf[0] << 8) | buf[1]; temp = 36.53 + ((double)raw) / 340; return temp * 100;; } //得到陀螺仪值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Get_Gyroscope(short *gx, short *gy, short *gz) { uint8_t buf[6], res; res = MPU_Read_Len(MPU_GYRO_XOUTH_REG, 6, buf); if (res == 0) { *gx = ((uint16_t)buf[0] << 8) | buf[1]; *gy = ((uint16_t)buf[2] << 8) | buf[3]; *gz = ((uint16_t)buf[4] << 8) | buf[5]; } return res;; } //得到加速度值(原始值) //gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号) //返回值:0,成功 // 其他,错误代码 uint8_t MPU_Get_Accelerometer(short *ax, short *ay, short *az) { uint8_t buf[6], res; res = MPU_Read_Len(MPU_ACCEL_XOUTH_REG, 6, buf); if (res == 0) { *ax = ((uint16_t)buf[0] << 8) | buf[1]; *ay = ((uint16_t)buf[2] << 8) | buf[3]; *az = ((uint16_t)buf[4] << 8) | buf[5]; } return res;; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
MPU6050.h
#ifndef __MPU6050_H #define __MPU6050_H #include "stdint.h" // //本程序只供学习使用,未经作者许可,不得用于其它任何用途 //ALIENTEK NANO STM32F103开发板 //MPU6050 驱动代码 //正点原子@ALIENTEK //技术论坛:www.openedv.com //创建日期:2018/7/28 //版本:V1.0 //版权所有,盗版必究。 //Copyright(C) 广州市星翼电子科技有限公司 208-2028 //All rights reserved // #define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到 #define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到 #define MPU_SELF_TESTX_REG 0X0D //自检寄存器X #define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y #define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z #define MPU_SELF_TESTA_REG 0X10 //自检寄存器A #define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器 #define MPU_CFG_REG 0X1A //配置寄存器 #define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器 #define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器 #define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器 #define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器 #define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器 #define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器 #define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器 #define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器 #define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器 #define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器 #define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器 #define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器 #define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器 #define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器 #define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器 #define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器 #define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器 #define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器 #define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器 #define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器 #define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器 #define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器 #define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器 #define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器 #define MPU_INT_EN_REG 0X38 //中断使能寄存器 #define MPU_INT_STA_REG 0X3A //中断状态寄存器 #define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器 #define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器 #define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器 #define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器 #define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器 #define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器 #define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器 #define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器 #define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器 #define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器 #define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器 #define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器 #define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器 #define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器 #define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器 #define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器 #define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器 #define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器 #define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器 #define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器 #define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器 #define MPU_USER_CTRL_REG 0X6A //用户控制寄存器 #define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1 #define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2 #define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位 #define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位 #define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器 #define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器 //如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位). //如果接V3.3,则IIC地址为0X69(不包含最低位). #define MPU_ADDR 0X68 //此为7位地址 //因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2) #define MPU_READ 0XD1 #define MPU_WRITE 0XD0 uint8_t MPU_Init(void); //初始化MPU6050 uint8_t MPU_Read_Len(uint8_t reg, uint8_t len, uint8_t *buf); //IIC连续读 uint8_t MPU_Write_Len(uint8_t reg, uint8_t len, uint8_t *buf); //IIC连续写 uint8_t MPU_Write_Byte(uint8_t reg, uint8_t Data); //IIC写一个字节 uint8_t MPU_Read_Byte(uint8_t reg); //IIC读一个字节 uint8_t MPU_Write_Bit(uint8_t addr, uint8_t bitNum, uint8_t Data); //写入8位寄存器的一个位 uint8_t MPU_Write_Bits(uint8_t addr, uint8_t bitStart, uint8_t length, uint8_t Data);//写入8位寄存器的多个位 uint8_t MPU_Read_Bit(uint8_t addr, uint8_t bitNum, uint8_t *Data); //读取一个位从8位器件的寄存器 uint8_t MPU_Read_Bits(uint8_t addr, uint8_t bitStart, uint8_t length, uint8_t *Data);//读取8位寄存器的多个位 uint8_t MPU_Set_Gyro_Fsr(uint8_t fsr); uint8_t MPU_Set_Accel_Fsr(uint8_t fsr); uint8_t MPU_Set_LPF(uint16_t lpf); uint8_t MPU_Set_Rate(uint16_t rate); int16_t MPU_Get_Temperature(void); uint8_t MPU_Get_Gyroscope(int16_t *gx, int16_t *gy, int16_t *gz); uint8_t MPU_Get_Accelerometer(int16_t *ax, int16_t *ay, int16_t *az); #define MPU_Refresh() MPU_Write_Byte(MPU_PWR_MGMT1_REG, 0X00) //唤醒MPU6050 void MPU_Delay_Ms(uint16_t Milliseconds); //移植时需修改 #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
main.c
#include <STC89C5xRC.H> #include "intrins.h" #include "stdint.h" #include "USART.h" #include "./MPU6050/MPU6050.h" void Delay1ms() //@11.0592MHz { unsigned char i, j; _nop_(); i = 2; j = 199; do { while (--j); } while (--i); } void Delay_ms(int i) { while(i--) Delay1ms(); } void main(void) { int16_t aacx,aacy,aacz; //加速度传感器原始数据 int16_t gyrox,gyroy,gyroz; //陀螺仪原始数据 int16_t temp; //温度 USART_Init(USART_MODE_1, Rx_ENABLE, STC_USART_Priority_Lowest, 11059200, 57600, DOUBLE_BAUD_ENABLE, USART_TIMER_1); MPU_Init(); while(1) { temp = MPU_Get_Temperature(); //得到温度值 MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据 printf("%d, %d, %d, %d, %d, %d, %d\r\n", aacx,aacy,aacz,gyrox,gyroy,gyroz,temp); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
实验现象
轻轻转动陀螺仪,可见数据随之变化。