
- 1省钱!NewBing硬核新玩法;手把手教你训练AI模特;用AI替代同事的指南;B站最易上手AI绘画教程 | ShowMeAI日报_ai绘画教程bilibili
- 2一口气说出 Redis 16 个常见使用场景_redis使用场景
- 3动态规划-思考解决动态规划问题_你的公司老板给了你一张n×n个格子组成的动态规划
- 4B样条曲线优化各种路径规划算法,matlab栅格地图。_b样条优化
- 5three.js流动线_threejs流动线
- 6自然语言处理工具包:NLTKspaCy
- 7超星高级语言程序设计实验作业 (实验01顺序程序设计)_分别输入三个浮点数代表a、b、c的值;如果c的值为0,直接输出-1,否则计算并输出多项
- 8笔记本wifi与台式机、内网服务器共网、共享wifi详细教程_服务器没有网,怎么共享笔记本网络
- 9核函数kernal
- 10Android~获取WiFi MAC地址和IP方法汇总_android 获取本机wlan mac地址
【51单片机快速入门指南】4.3.2: MPU6050:一阶互补滤波、二阶互补滤波和卡尔曼滤波获取欧拉角
赞
踩
普中51-单核-A2
STC89C52
Keil uVision V5.29.0.0
PK51 Prof.Developers Kit Version:9.60.0.0
上位机:Vofa+ 1.3.10
参考资料:
MPU6050数据采集及其意义和滤波(一阶互补滤波、二阶互补滤波、卡尔曼滤波)—— 275891381
关于MPU6050姿态解算的一阶互补滤波方法(从原理到代码实现) —— 可以叫我马同学
姿态融合的一阶互补滤波、二阶互补滤波、卡尔曼滤波核心程序 —— 卖硬件的
源码
stdint.h见【51单片机快速入门指南】1:基础知识和工程创建
软件I2C程序见【51单片机快速入门指南】4: 软件 I2C
串口部分见【51单片机快速入门指南】3.3:USART 串口通信
MPU6050.c、MPU6050.h见【51单片机快速入门指南】4.3: I2C读取MPU6050陀螺仪的原始数据
MPU6050_Filter.c
#include "MPU6050.h" #include <math.h> #include "./MPU6050/MPU6050_Filter.h" #define PI 3.141592653589793 float Delta_t = 1; float GYRO_K = 1; #define First_Order_Filter_Tau 0.075 float First_Order_k = 1; void MPU6050_Filter_Init(float loop_ms) { Delta_t = loop_ms/1000.; First_Order_k = First_Order_Filter_Tau / (First_Order_Filter_Tau + Delta_t); switch((MPU_Read_Byte(MPU_GYRO_CFG_REG) >> 3) & 3) { case 0: GYRO_K = 131; break; case 1: GYRO_K = 65.5; break; case 2: GYRO_K = 32.8; break; case 3: GYRO_K = 16.4; break; } } float First_Order_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, float * angle2) { *angle2 = First_Order_k * (*angle2 + (-gyro2 / GYRO_K) * Delta_t) + (1 - First_Order_k) * (atan2(acc1, acc3) * 180 / PI); return *angle2; } #define Second_Order_Filter_k 5 float Second_Order_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, Second_Order_Filter* filter) { float angle_m = atan2(acc1, acc3) * 180 / PI; float gyro_m = -gyro2 / GYRO_K; float x1, x2; x1 = (angle_m - filter->angle) * Second_Order_Filter_k * Second_Order_Filter_k; filter->y = filter->y + x1 * Delta_t; x2 = filter->y + 2 * Second_Order_Filter_k * (angle_m - filter->angle) + gyro_m; filter->angle = filter->angle + x2 * Delta_t; return filter->angle; } #define Q_angle 0.05 #define Q_gyro 0.0003 #define R_angle 0.01 float MPU_Kalman_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, MPU_Kalman_Filter* filter) { float newAngle = atan2(acc1, acc3) * 180 / PI; float newRate = -gyro2 / GYRO_K; float E; float K_0, K_1; float Angle_err_x; filter->angle += Delta_t * (newRate - filter->Q_bias_x); filter->P_00 += - Delta_t * (filter->P_10 + filter->P_01) + Q_angle * Delta_t; filter->P_01 += - Delta_t * filter->P_11; filter->P_10 += - Delta_t * filter->P_11; filter->P_11 += + Q_gyro * Delta_t; Angle_err_x = newAngle - filter->angle; E = filter->P_00 + R_angle; K_0 = filter->P_00 / E; K_1 = filter->P_10 / E; filter->angle += K_0 * Angle_err_x; filter->Q_bias_x += K_1 * Angle_err_x; filter->P_00 -= K_0 * filter->P_00; filter->P_01 -= K_0 * filter->P_01; filter->P_10 -= K_1 * filter->P_00; filter->P_11 -= K_1 * filter->P_01; return filter->angle; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
MPU6050_Filter.h
#ifndef MPU6050_Filter_H_ #define MPU6050_Filter_H_ typedef struct { float y; float angle; }Second_Order_Filter; typedef struct { float P_00, P_01, P_10, P_11; float Q_bias_x; float angle; }MPU_Kalman_Filter; void MPU6050_Filter_Init(float loop_ms); float First_Order_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, float * angle2); float Second_Order_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, Second_Order_Filter* filter); float MPU_Kalman_Filter_Calc(int16_t acc1, int16_t acc3, int16_t gyro2, MPU_Kalman_Filter* filter); #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
使用方法
先调用MPU6050_Filter_Init(dt),参数为一次循环的时间,单位为ms
再使用滤波函数。
测试程序
生成的程序较大,对于89C52,需要注释掉没用到的函数。
一阶互补滤波
#include <STC89C5xRC.H> #include "intrins.h" #include "stdint.h" #include "USART.h" #include "./MPU6050/MPU6050.h" #include "./MPU6050/MPU6050_Filter.h" void Delay1ms() //@11.0592MHz { unsigned char i, j; _nop_(); i = 2; j = 199; do { while (--j); } while (--i); } void Delay_ms(int i) { while(i--) Delay1ms(); } void main(void) { int16_t aacx,aacy,aacz; //加速度传感器原始数据 int16_t gyrox,gyroy,gyroz; //陀螺仪原始数据 float anglex = 0; float angley = 0; float anglez = 0; USART_Init(USART_MODE_1, Rx_ENABLE, STC_USART_Priority_Lowest, 11059200, 57600, DOUBLE_BAUD_ENABLE, USART_TIMER_1); MPU_Init(); MPU6050_Filter_Init(47); while(1) { MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据 printf("%f, " , First_Order_Filter(aacy, aacz, gyrox, &anglex)); printf("%f, " , First_Order_Filter(aacx, aacz, gyroy, &angley)); printf("%f\r\n",First_Order_Filter(aacx, aacy, gyroz, &anglez)); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
效果
只看了俯仰和滚转
First_Order_Filter_Tau 要根据需要调节,我这里取First_Order_Filter_Tau = 0.075

二阶互补滤波
#include <STC89C5xRC.H> #include "intrins.h" #include "stdint.h" #include "USART.h" #include "./MPU6050/MPU6050.h" #include "./MPU6050/MPU6050_Filter.h" void Delay1ms() //@11.0592MHz { unsigned char i, j; _nop_(); i = 2; j = 199; do { while (--j); } while (--i); } void Delay_ms(int i) { while(i--) Delay1ms(); } Second_Order_Filter anglex = {0, 0}, angley = {0, 0}, anglez = {0, 0}; void main(void) { int16_t aacx,aacy,aacz; //加速度传感器原始数据 int16_t gyrox,gyroy,gyroz; //陀螺仪原始数据 USART_Init(USART_MODE_1, Rx_ENABLE, STC_USART_Priority_Lowest, 11059200, 57600, DOUBLE_BAUD_ENABLE, USART_TIMER_1); MPU_Init(); MPU6050_Filter_Init(56); while(1) { MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据 printf("%f, " , Second_Order_Filter_Calc(aacy, aacz, gyrox, &anglex)); printf("%f, " , Second_Order_Filter_Calc(aacx, aacz, gyroy, &angley)); printf("%f\r\n",Second_Order_Filter_Calc(aacx, aacy, gyroz, &anglez)); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
效果
只看了俯仰和滚转
Second_Order_Filter_k根据需要,越大跟随越快,越小越平滑
(我参考的大佬有取0.8的,有取10的,我这里取5)。
要根据需要调节。
卡尔曼滤波
#include <STC89C5xRC.H> #include "intrins.h" #include "stdint.h" #include "USART.h" #include "./MPU6050/MPU6050.h" #include "./MPU6050/MPU6050_Filter.h" void Delay1ms() //@11.0592MHz { unsigned char i, j; _nop_(); i = 2; j = 199; do { while (--j); } while (--i); } void Delay_ms(int i) { while(i--) Delay1ms(); } MPU_Kalman_Filter anglex = {0}; MPU_Kalman_Filter angley = {0}; MPU_Kalman_Filter anglez = {0}; void main(void) { int16_t aacx,aacy,aacz; //加速度传感器原始数据 int16_t gyrox,gyroy,gyroz; //陀螺仪原始数据 USART_Init(USART_MODE_1, Rx_ENABLE, STC_USART_Priority_Lowest, 11059200, 57600, DOUBLE_BAUD_ENABLE, USART_TIMER_1); MPU_Init(); MPU6050_Filter_Init(76); while(1) { MPU_Get_Accelerometer(&aacx, &aacy, &aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox, &gyroy, &gyroz); //得到陀螺仪数据 printf("%f, " , MPU_Kalman_Filter_Calc(aacy, aacz, gyrox, &anglex)); printf("%f, " , MPU_Kalman_Filter_Calc(aacx, aacz, gyroy, &angley)); printf("%f\r\n",MPU_Kalman_Filter_Calc(aacx, aacy, gyroz, &anglez)); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
效果
只看了俯仰和滚转
Q参数:过程噪声协方差 Q参数调滤波后的曲线平滑程度,Q越小越平滑;
R参数:观测噪声协方差 R参数调整滤波后的曲线与实测曲线的相近程度,R越小越接近(收敛越快)
我参考的大佬有取0.01,0.0003,0.01的,也有取0.001,0.005,0.5的
我这里取
Q_angle=0.05
Q_gyro=0.0003
R_angle=0.01
要根据需要调节。
在suhetao/stm32f4_mpu9250中有大神对EKF / UKF / CKF / SRCKF的实现,感兴趣的可以看看。
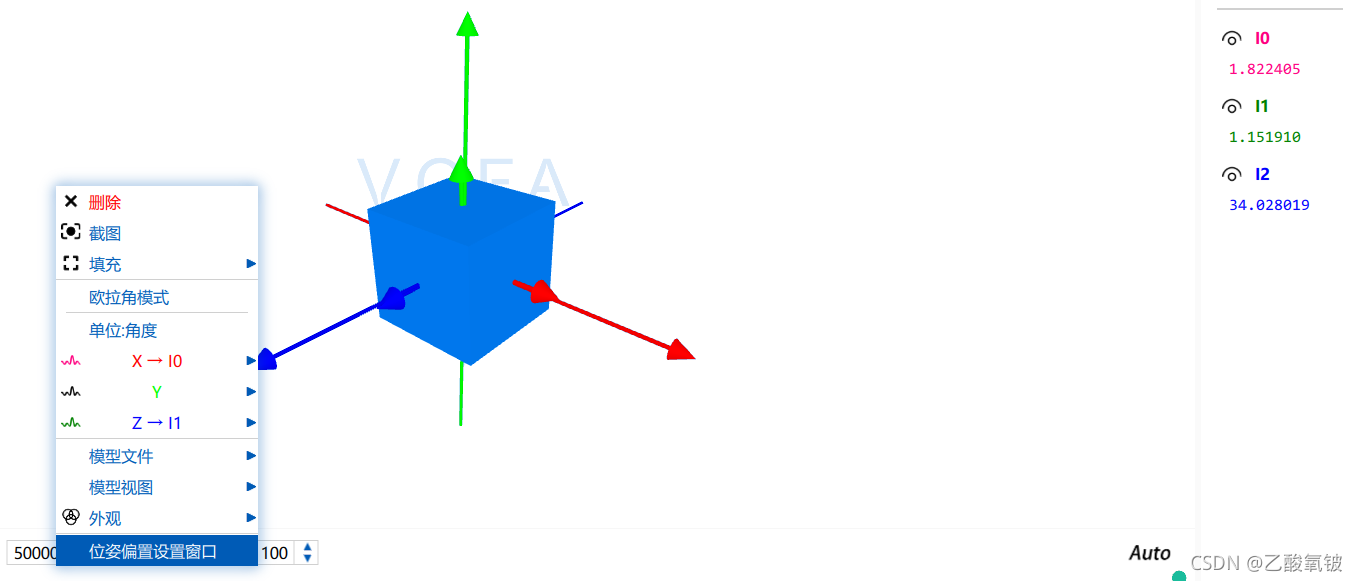
总结
由于每种滤波器的参数都会极大地影响该滤波器的性能(一阶滤波、二阶滤波各一个参数,卡尔曼滤波三个参数),因此难以互相比较,我建议根据单片机的资源、性能选择要用的滤波器,调参时配合上位机观察立方体的效果和对应波形。

