
热门标签
热门文章
- 1ACL+SASL的认证配置后的Kafka命令操作(Windows版)_respondtoserver sasl authentication failed using l
- 2【SpringBoot】SpringBoot中使用AOP实现日志记录功能
- 3嵌入式0基础开始学习 Ⅱ 数据结构(1)数据结构
- 4分布式文件系统HDFS及其简单使用_分布文件系统hdfs的helloword程序演示
- 5vLLM 部署 Qwen_vllm部署qwen
- 6悬赏“黄金夹克”主人,来认证精英会兑现大满贯荣耀
- 7为hexo+landscape主题添加百度统计功能_hexo+landscape主题统计用户访问
- 8解决Android Gradle plugin requires Java 17 to run. You are currently using Java的具体操作步骤
- 9Java数据结构与算法(1)_数据结构与算法是一门
- 10什么是SLA服务可用性
当前位置: article > 正文
【ROS2机器人入门到实战】学会使用RVIZ2-TF组件_rviz2 tf
作者:我家自动化 | 2024-06-01 00:50:48
赞
踩
rviz2 tf
2.可视化坐标变换
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
运行上节课的示例,打开终端输入rviz2,打开rviz2,我们尝试在rviz2中直观的看到坐标之间的关系
1.设置默认坐标系
刚打开RVIZ2,你看到的应该是这样一个界面
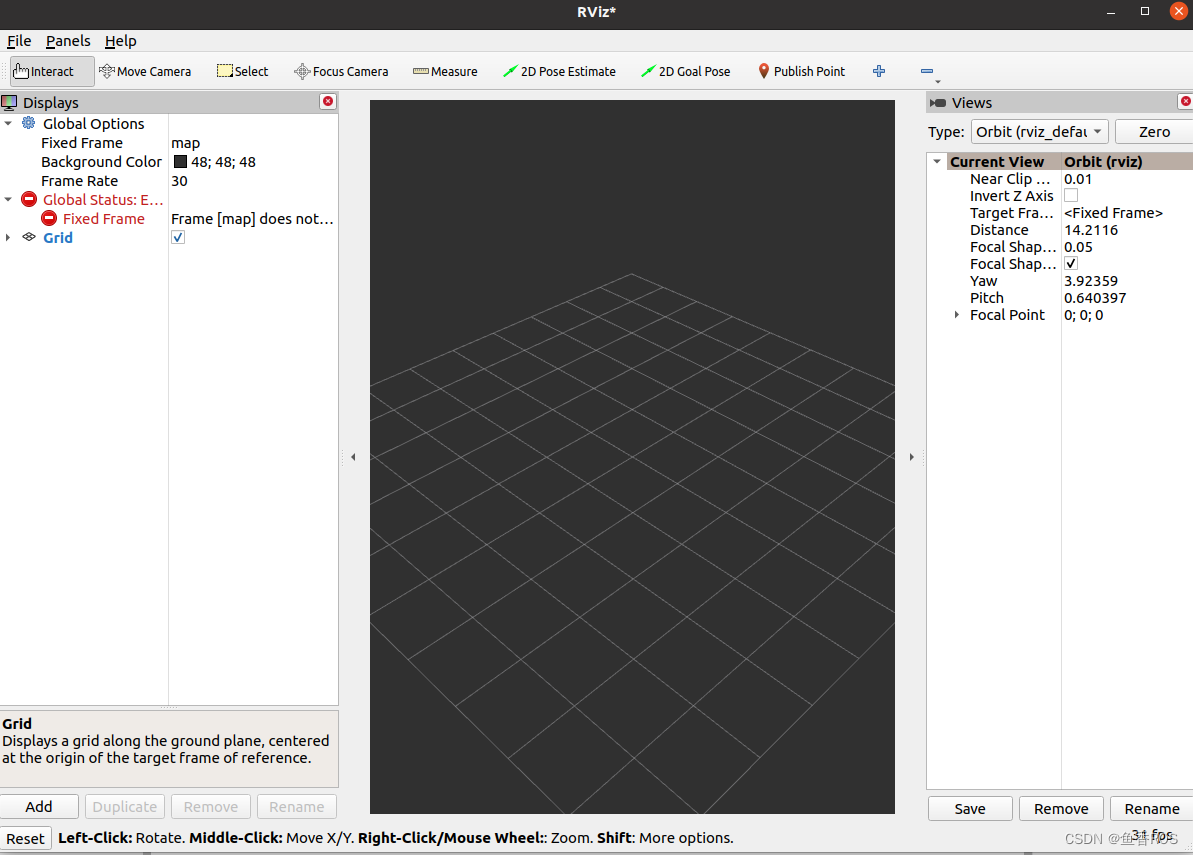
我们可以看到窗口左边的配置选项,全局选项默认选择的FixedFrame为map,这个map就是rviz2默认的坐标系的名字,动动脚趾头想一下我们并没有发布map这个坐标系,所以下面Global Status也是红色的错误。
此时我们可以手动的修改以下固定的Frame为B,让默认的坐标系设置成机械臂的基坐标系{B}。
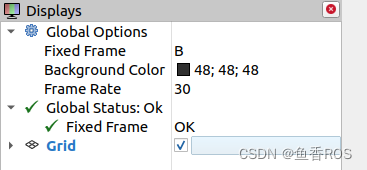
设置完成后,错误也没有了,因为此时的ROS2的TF中确确实实找到了一个叫做B的坐标系。
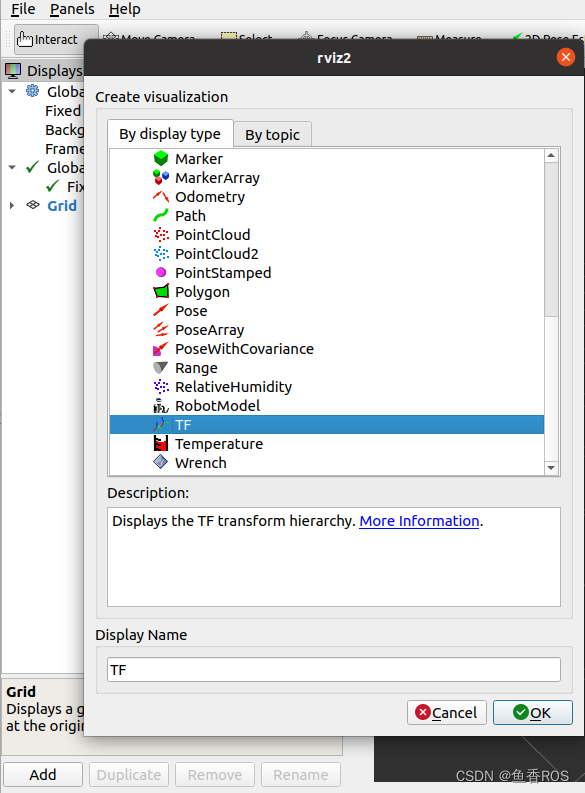
2.添加TF插件
即使没有错误,现在我们还是看不到坐标系,这是为什么呢?在小鱼的动手学ROS2课程当中,小鱼讲过,RVIZ2是一个插件化的软件,所以我们要添加TF相关的插件才能看到TF数据。
点击左下角的Add,在弹出的窗口中选择TF点击OK
之后你在RVIZ2中就可以看到下图的坐标关系
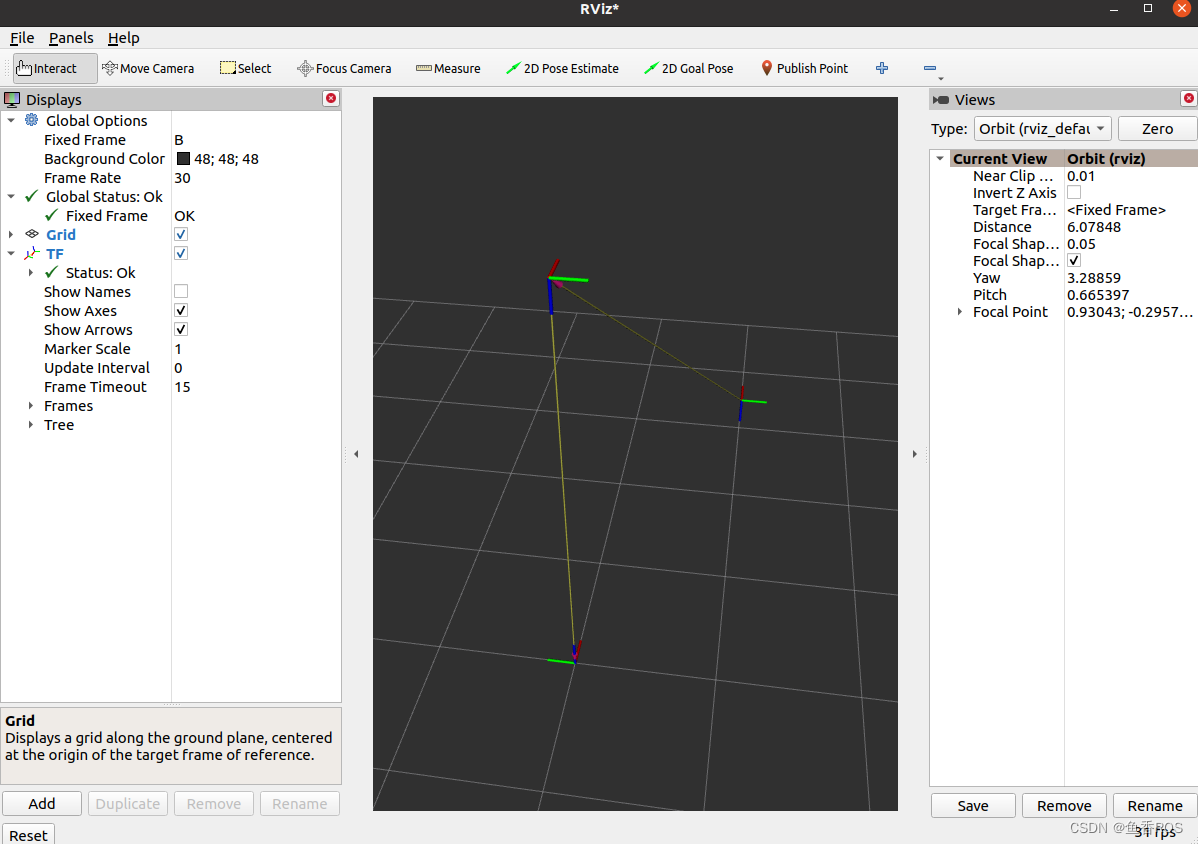
终于显示出来了,但是没有名字又太小了,修改下左边的选项,勾选Show Names,修改Marker Scale 为5

如果觉得视角不好,可以使用鼠标左键右键以及按下滚轮拖动修改。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/655219
推荐阅读
相关标签

