
热门标签
热门文章
- 1YOLOv8 更换骨干网络之 MobileNetV3:轻量级目标检测的新热点_yolov8 mobilenetv3
- 2Java项目入门开发实战_本关任务:用bootstrap实现pc端的博客头部效果
- 3Windows 如何删除右键菜单中的 “Git Gui Here”和“Git Bash Here”_windows右键菜单删除git
- 4区块链的公有链、私有链、联盟链_私链 人员和节点自由进出
- 5玫瑰编程--python_玫瑰花代码
- 6介绍一个成功的 Git 分支模型_功能分支开发模型
- 7【超详细】Jmeter安装配置详细教程_jmeter安装详细教程
- 8硬件描述语言(HDL)基础——基本结构_本关任务:请参考下图,声明必要的内部信号,采用持续赋值语句assign完成电路的建模
- 9在eclipse中用git导入工程问题:cannot open git-upload-pack_sts拉代码报错cannot open git-upload-pack
- 10SLA 是什么?如何实现 SLA 管理_互联网sla
当前位置: article > 正文
虚拟机ubuntu20.04使用livox mid360测试fast_lio_虚拟机连接mid
作者:我家自动化 | 2024-06-08 01:42:09
赞
踩
虚拟机连接mid
1.参考ubuntu20.04使用livox mid360测试fast_lio
2.虚拟机有个坑,如果完全按照上面设置,运行:
roslaunch livox_ros_driver2 msg_MID360.launch
多半会只有一下结果
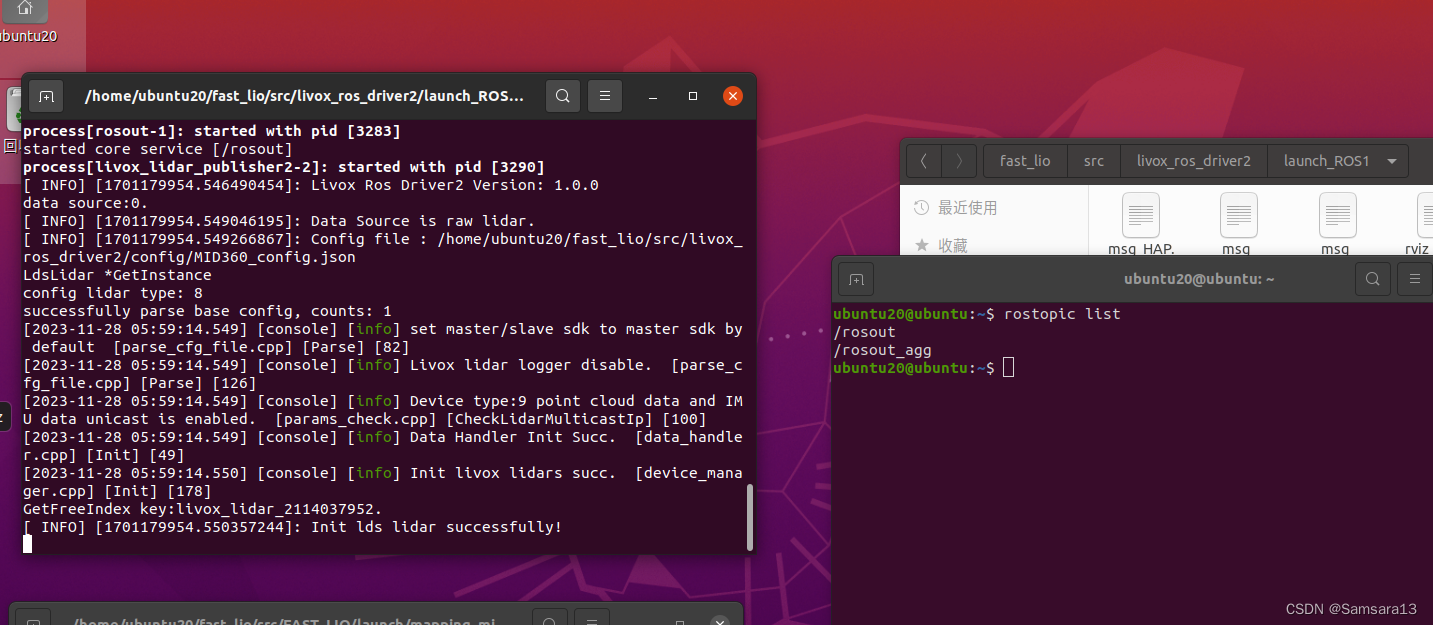
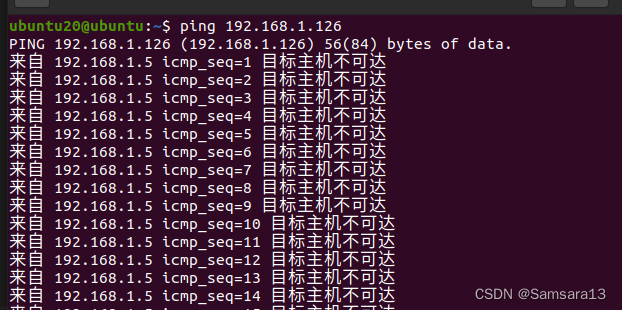
原因是虽然你主机ip设置正确,init lds lidar successfull 但是读取不了雷达的数据,你ping一下雷达的ip就会发现ping不通
ping 192.168.1.1xx
修改方法:
1. 将虚拟机网络适配器改成桥连接方式

2.然后打开编辑虚拟网络编辑器
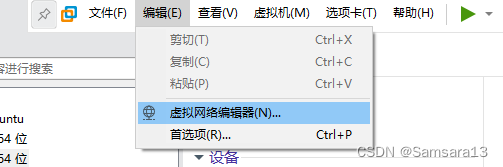
3.桥接到自己的物理网卡

4.设置主机的以太网ip

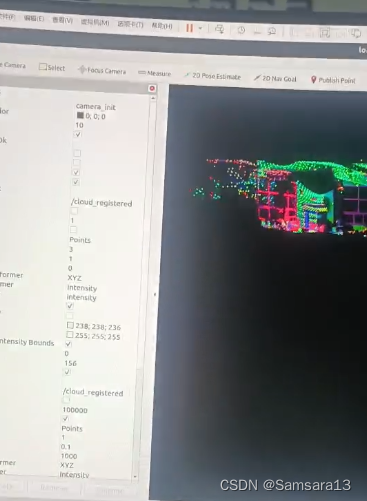
5.回到虚拟机,将虚拟机ip改成与以太网ip一致即可
效果如下:
6.以为结束了?并没有,有的同志可能会和我遇到一样的bug就是我更改了网络适配器重启之后发现ubuntu的网络连接没有了!


7.假如也有以上情况,解决办法如下:
8.最后再把ip设一下,记得别忘了livox_driver里config的ip也要设,基本就没问题了
ps.本人萌新,假若文章有问题可在评论区指正喔!或者有更好的解决方案也希望可以提出来,十分感谢。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/687928
推荐阅读
相关标签

