
- 1Python 学习 ---> 函数、函数式编程、高阶函数、匿名函数、偏函数
- 2git clone 报错过早的文件结束符(EOF)_git clone eof
- 3Spring6入门_使用spring6的话spring-test的maven版本应该是多少
- 4java实现excel导入与导出(总结与实现)_java excel 导出
- 5如何在JMeter中玩懂KAFKA_jmeter kafka
- 63D绘图 WebGl引擎----ThreeJS 3D渲染引擎_webgl 图片转成3d
- 7利用docker-compose 安装 flowable-ui 工作流_docker-compose flowable
- 8基于FPGA的五子棋(论文+源码)_基于fpga的五子棋游戏论文
- 928岁从事功能测试被辞,面试2个月都找不到工作吗?
- 106月13日 植物大战僵尸杂交版 v2.1 Mac版下载 新增商店/背包
ES入门十一:正排索引和倒排索引_elasticsearch中的正排索引时怎么实现的
赞
踩
索引本质上就是一种加快检索数据的存储结构,就像书本的目录一下。
为了更好的理解正排索引和倒排索引,我们借由一个 **唐诗宋词比赛,**这个比赛一共有两个项目:
- 给定诗词名称,背诵整首
- 给诗词中几个词语,让你说出带这些词语的诗词。
不难想到,1比较简单,就是一个正向索引,2比较难,属于逆向索引
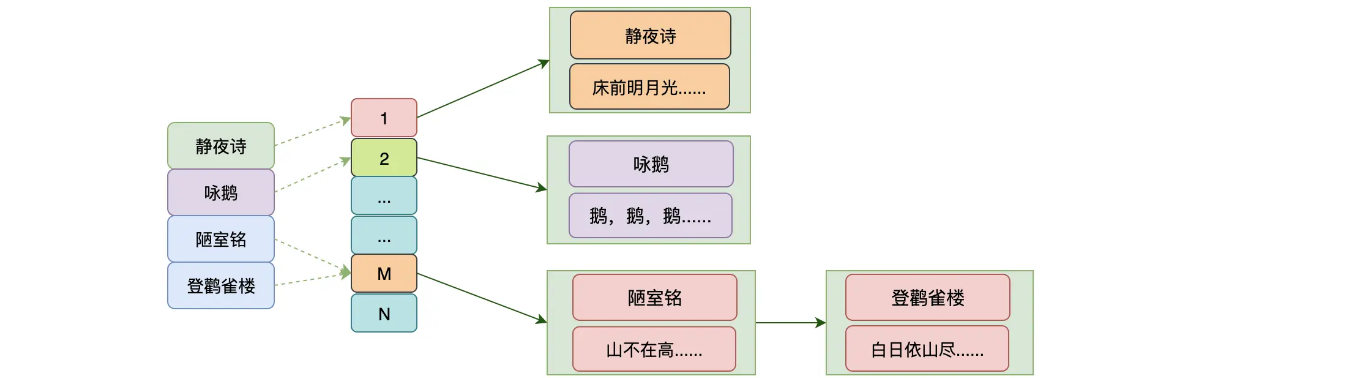
正排索引
如果想赢得第一个项目,我们怎么设计,我们可以把诗词名作为key,然后诗词内容作为value,然后放到hash中存储起来。像这种我们吧实体id到数据内容实体的关联关系的索引我们称之为正排索引
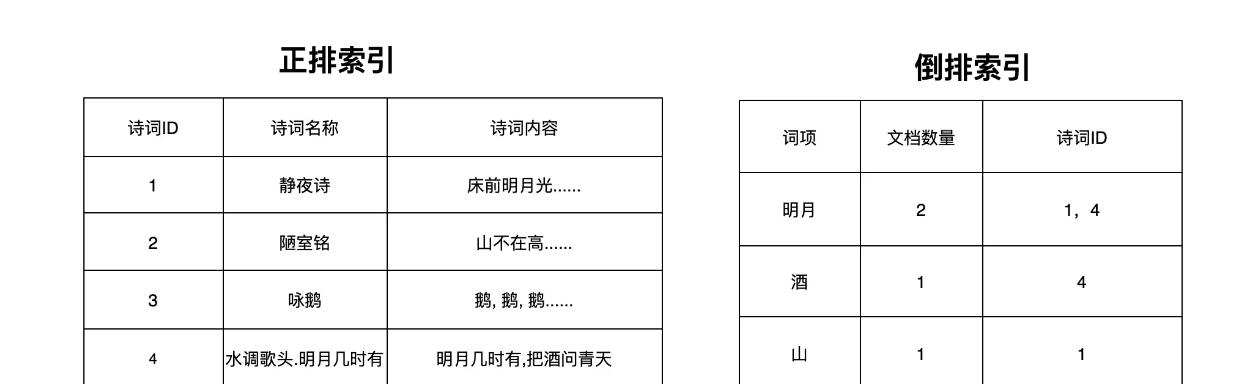
倒排索引
但是如果说我们想通过词语来找出哪些诗词中含有这些诗词,这个怎么做哪?不能用hash这种来存储了,这里就可以考虑倒排索引,
- 将所有诗词的内容进行分词
- 建立各个词语到诗词名称的索引
根据倒排索引,我们可以
- 获取诗词(词项)对应的文档id
- 如果有多个诗词(词项)也就会获取到多个文档id,然后做交集即可。
- 最后通过交集的文档id去文档里面找
用hash行不行
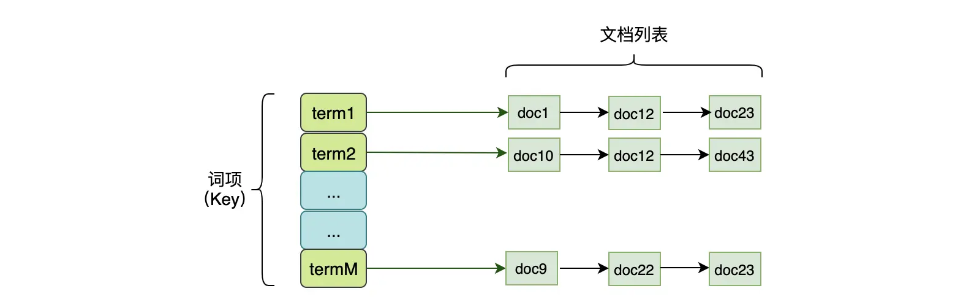
如上图,我们看起来用hash实现也是可以的,但是哪,如果数据量非常大,你想想诗词中取这个key得多少,更别说其他需求了。所以简单的使用hash是不行的,因为在存储海量数据的时候,系统将会面临下面这些问题:
- 分词形成的词项(term)可能是海量的,需要可以在内存和磁盘上高效存储
- 既然词项是海量的,那么如何快速找到对应的词项也是个问题
- 每个词项对应的文档可能非常多,也就是上图中的文档列表很长
- 在词项对应的文档多的情况下,多个文档列表做交集也是一个很大的问题
是不是感觉很难?
其实就是词项和文档列表的问题
- Lucene的倒排索引的实现中,使用词项索引(Term Index)解决了问题1和问题2
- Lucene使用Roaring Bitmaps、跳表等技术解决了问题3和问题4
倒排索引的原理
倒排索引的组成一共有3个部分:
- Term Index
- Term Dictionary
- Posting List
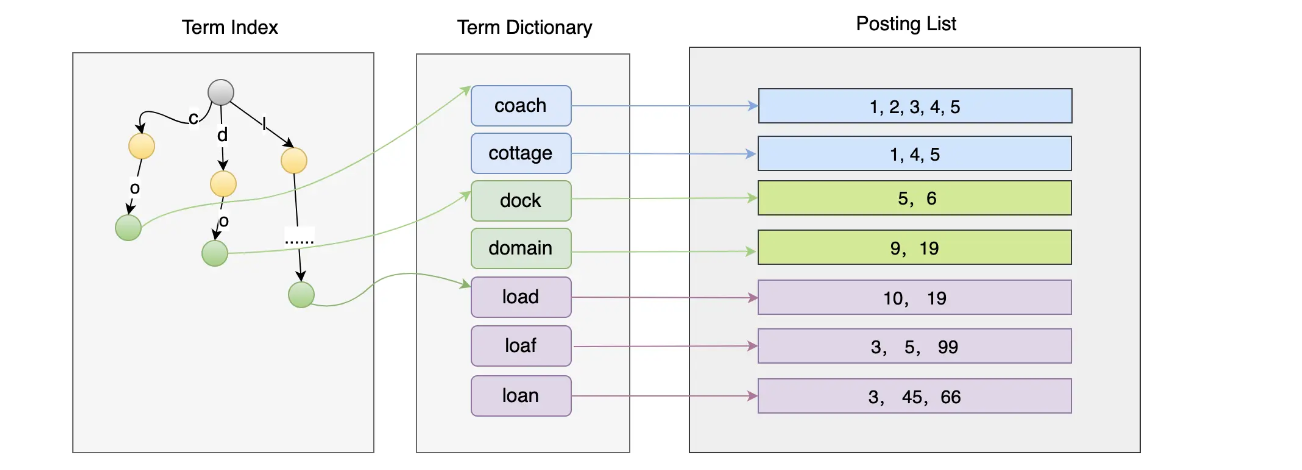
Term Dictionary放的是词项,如果词项越来越多查询肯定不行,所以就有了**Term Index,它是Term Dictionary的索引,最好设计得越小越好,这样缓存在内存中也没有压力。**Posting LIst保存了每个词项对应的文档Id列表
Segment
在了解 Term Index、Term Dictionary、Posting List 的具体实现前,我们先来看看 Segment、文档、Field、Term 与它们的关系。
默认情况下,ES每秒会把缓存中的数据写入到Segment,然后根据某些规则进行刷盘,并且合并这些Segment。所以Segment的数据一旦写入就不变了,采用不变形有2个好处:
- 更新对磁盘来说不友好
- 一个可变的数据有并发写的问题
逻辑上,一个Segment上会有多个文档,一个文档有多个字段。如下图中的Segment就有两个文档,文档1和文档2都有两个Field。这些字段的内容会被分词器形成多个Term,然后以块的形式保存到Term Dictionary中,并且系统会对Term Dictionary的内容做索引形成Term Index。在搜索的时候,通过
- Term Index找到Block
- 之后进一步找到Tem对应的Posting List中的文档Id
- 然后计算出符合条件的文档Id列表
需要注意的是,Segment中的每个字段(Field)都会有自己的Term Index、Term Dictionary、Posting List结构,也就是说每个Field中的这些结构都是独立的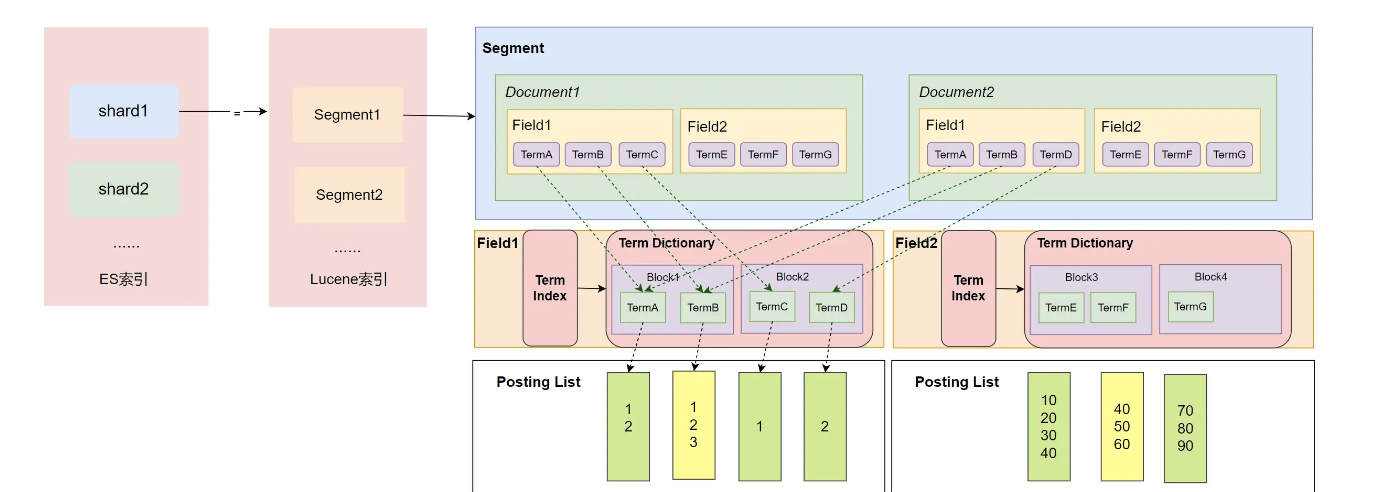
Term Index的实现
Term Index作为Term Dictionary的索引,其最好是资源消耗小,可以缓存在内存中,而且数据查找有较低的复杂度。在讨论Tem Index如何实现前,看下面这几个词语:
这两对词语分别有公共的前缀:co和do。如果我们把Term Dictionary中的Term排序后按公共前缀抽取出来按块存储,而Term Index只使用公共前缀做索引,那本身要存储coach、cottage两个字符串的索引,现在只需要存储co一个就行了。这样的话,拥有同一个公共前缀的Term越多,实际上就是越省空间,并且这种设计在查找的时候 复杂度是前缀公共的长度:0(length(prefix))
但是这样的索引也有缺点,它只能找到公共前缀所在的块的地址,所以它既无法判断这个Term是否存在,也不知道这个Temr保存在Term Dictionary(.tim)文件具体在什么位置上。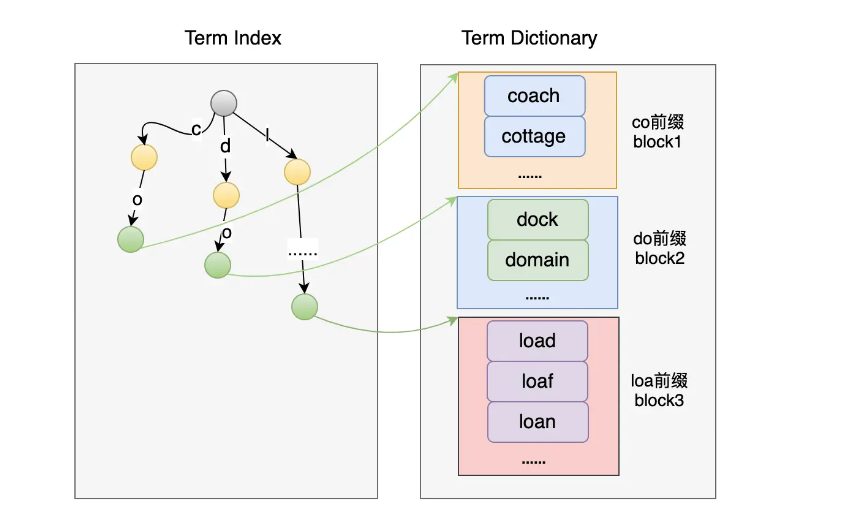
如上图,对于在每个块中如何快速查找到对应的Term,我们可以使用二分法来搜索,因为Block中的数据是有序的。但机智的你是不是也发现可以优化的地方?因为前缀在Term Index中保存了,那么Block中就不要为每个Term在保存对应的前缀了,所以Block中保存的每个Term都可以省略掉前缀了。比如,co 前缀的 block1 中保存的内容为 ach、ttage 即可。
**对于前缀索引的实现,业界使用了FST 算法来解决。**FST(Finite State Transducers)是一种 FSM(Finite State Machines,有限状态机),并且有着类似于 Trie 树的结构。下面来简单了解一下 FST。
FST有以下特点:
- 通过对Term Dictionary数据的前缀复用,压缩了存储空间
- 高效的查询性能,O(len(prefix))的复杂度;
- 构建后不可变。(事实上,倒排索引一旦生成就不可变了。)
下图是一个简单的FST图。从图中可以看出,一条边有两个元素label和out,其中label为key的元素,例如cat这个key 就有 c、a、t 这三个元素,out为此边的值value。小圆圈为FST的一个节点,节点分为两类-普通节点和Final节点,图中灰黑色的为Final节点,Final节点中还有Finalout,代表 Final 节点的值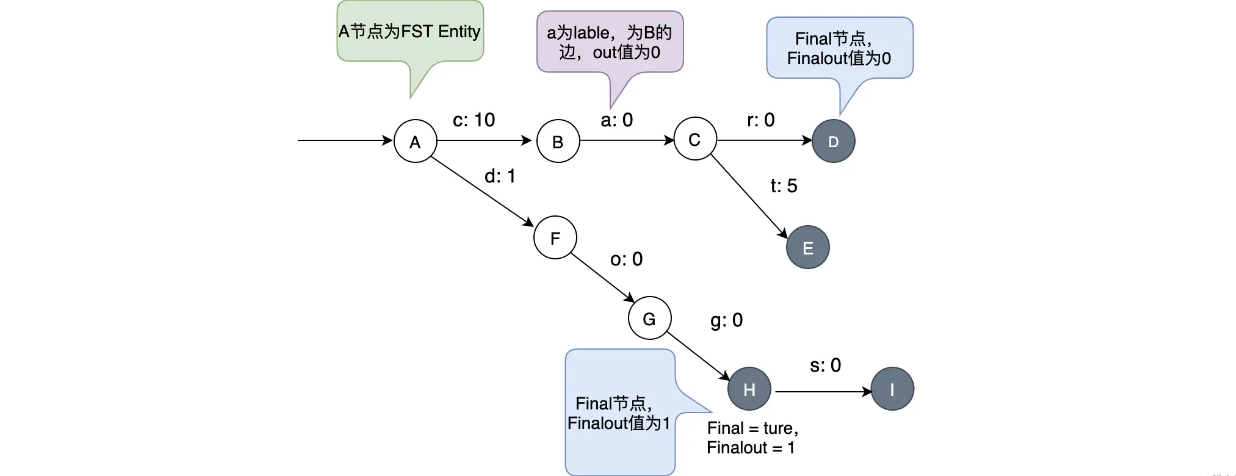
当访问cat的时候,读取 c、a、t 的值作和, 再加上 Final 节点的 Finalout 值即可:10 + 0 + 5 + 0 = 15;当访问 dog 的时候,读取 d、o、g 的值即可,但是由于 g 为 Final,所以需要加上 g 的 Finalout:1 + 0 + 0 + 1 = 2。
简单的可以理解为这个: 不需要看上面ABC这些大的节点,直接看边,cat就是c+a+t,另外看这个t是不是final节点,如果dog的话还需要加上g为final out =1
Term Dictionary的实现
在倒排索引组成的3个部分中,Term dictionary保存了Term和Posting List的关系,存储了Term相关的信息, 比如记录该Term的文档数量、Term在Segment中出现的频率,还保存了指向Posting List的指针(文档列表的id的位置、词频位置等),
如下图,在对Term Dictionary 做索引的时候,先将所有的Term进行排序,然后将Term Dictionary中有共同前缀的Term抽取出来进行存储,再对共同前缀索引,最后通过索引就可以找到公共前缀对应的块在Term Dictionary文件中的偏移地址。

由于每个块中都有共同前缀,所以不需要再保存每个Term的全部内容,只需要保存其后缀即可,而且这些后缀都是排好序的。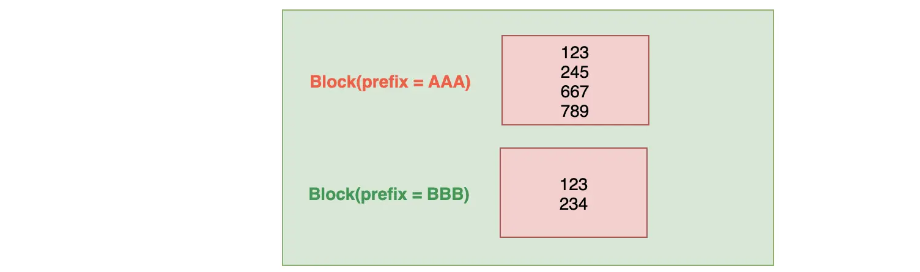
至此,我们就可以通过Term Index 和 Term Dictionary 快速判断一个 Term 是否存在,并且存在的时候还可以快速找到对应的 Posting List 信息
Posting List的实现
上面的Posting List并不是只是包含文档ID,其实Posting List包含的信息比较多,如文档Id、词频、位置等等。Lucence把这些数据分成三个文件进行存储:
- .doc文件,记录了文档Id信息和Term的词频,还记录了跳跃表信息,用来加速文档Id的查询;还记录了Term在pos和pay文件中的位置,有助于进行快速读取
- .pay文件,记录了Payload信息和Term在doc中的偏移信息;
- .pos文件,记录了Term在doc中的位置信息
因为倒排索引的主要目的就是找到文档id,所以下面讨论Posting List的时候我们就关注文档Id的信息,其他的就忽略了。前面提到过,Posting List主要面临2个问题:
- 如果节省存储
- 如何快速做交集
要节省存储,可以对数据进行压缩存储;至于如何做交集,业界应用的得比较多的是跳表、Roaring Bitmaps等技术。下面我们就针对这两个问题以及对应的方法分别讲解一下:
节省存储:整形压缩
不知道你有没有留意过,其实int类型或者long类型是可以进行压缩的。我们可以根据需要处理的数据的取值范围,选择占用更小字节数的数据类型来存储原数据,例如下面的Int数组:
# Int数组
[8, 12, 100, 140]
# 各个元素与其二进制表示
8 -> 00001000
12 -> 00001100
100 -> 01100100
140 -> 10001100
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
这个Int数组,如果每个数据都需要用4个字节来保存的话,需要16个字节。但你会发现,数组中最大的数140只需要用8位(一个字节)就可以表示了。这样一来,原来需要16个字节的数据只需要4个字节就可以表示了。
整数压缩基本就是这个思路了,当然还有其他玩法(下面介绍的VintBlock),但核心的思想都是:用最少的位数来表示原数据,并且兼顾数据读取效率。Lucene在Posting List中使用了2种编码格式来对整形类型的数据进行压缩- PackedBlock和VinBlock,并且在对整数进行压缩的基础上,还会对文档Id使用差值存储的方式来对数据进一步的压缩处理。
- PackedBlock
在Lucene中,每当处理完128个包含某个Term的文档是,就会将这个文档Id和词频使用的PackedInts进行压缩存储,生成一个PackedBlock。PackedBlock中使用两个数组,一个是存储文档id的,一个是存储词频的。所以PackedBlock是存储固定长度的整形数组的结构,且数组的长度为128.
下面简单介绍一下PackedInts的实现,PackedInts会将Int[] 压缩打包成一个Block,其压缩方式是把数组中最大的那个数占用的有效位数作为标准,然后各个元素打包的数组中,每个元素都按这个有效位数来算,例如下面数组:
# Int数组
[8, 12, 100, 120]
# 各个元素与其二进制表示
8 -> 0001000
12 -> 0001100
100 -> 1100100
120 -> 1111000
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
最大数120的有效位数是7,所以数组中所有数据都可以使用7位来表示。假设这个数组有128个元素,且最大位120,那么这个压缩后的数组就如以下:
最终这个数组占用的位数位7bit * 128 = 896bit =112字节(这里没有算len占用的空间,但是不要忽略len也是要花费空间存储的),这比起原数据128 * 4字节=512字节确实节省了不少
PackedBlock只能存储固定长度的数组数据,如果一个Segment的文档数不是128的整数倍,那该怎么办那?这时可以使用VintBlock来进行存储
- VintBlock
VintBlock通过使用变长整形编码方式来进行压缩,所以其可以存储复合的数据类型,不需要想PackedInts那样规定数据元素是多少位的。VintBlock采用Vint来对Int类型进行压缩,Vint采用可变长的字节来表示一个整数,每个字节只使用第1位到第7位来存储数据,第8位用来作为是否需要读取下一个字节的标记
如上图,本身Int 200需要4个字节,使用Vint只需要2个字节存储即可
- 使用PackedBlock与VintBlock来解析.doc文件
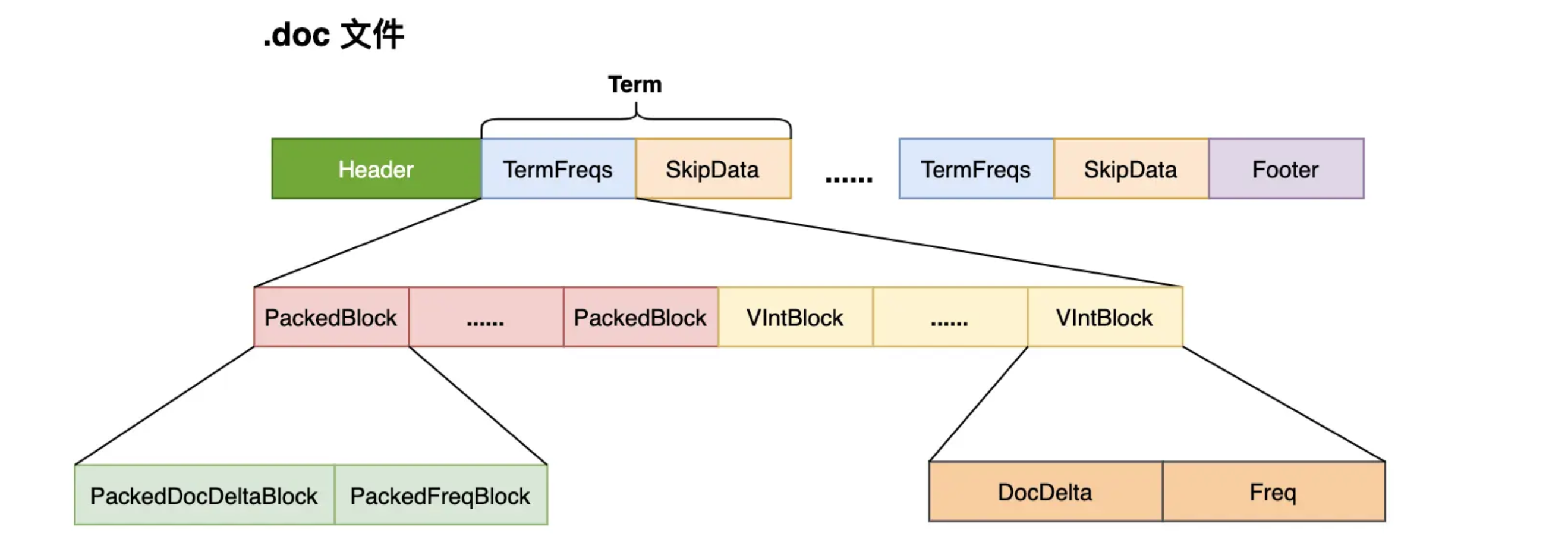
Lucene在处理文档的时候,每处理 128 篇文档就会将其对应的文档 ID 数组(docDeltaBuffer)和词频(TermFreq)数组(freqBuffer)处理为两个 Block:并且使用 PackedInts 类对数据进行压缩存储,生成一个 PackedBlock。而把最后不足 128 篇文档的数据采用 VIntBlock 来存储(如果有 131 个文档,会生成一个 PackedBlock 和 3 个 VIntBlock)。并且在生成 PackedBlock 的时候,会生成跳表(SkipData),使得在读取数据时可以快速跳到指定的 PackedBlock。
下图为你整理了处理 .doc 文件的数据结构,以加深你对 Posting List 的理解。
- 使用文档Id差值存储来节省空间
整数的压缩可以使当个数值占用的空间得以减少,但数与数之间还存在着微妙的关系,两个正整数的差一定会比它们种最大的那一个要小
利用这个特性,我们可以使需要压缩的整数变成最小的数,从而进一步压缩空间。因为存储文档Id的数组是有序的(需要注意的是,词频是无序的,无法使用下面的处理方式),所以在保存文档ID的时候,docDeltaBuffer 中存的不是文档的 ID,而是与上一个文档 ID 的差值,这样做可以进一步压缩存储空间!
ids = [1, 4, 6, 9, 14, 17, 21, 25]
- 1
- 2
如上面给定的数组 ids,如果用 PackedInts 的方式来对数据进行压缩的话,那么25(0001 1001)最少需要用 5 bit 来存储,所以整个数组需要 5 * 8 = 40 bit 来存储。如果数组中存储的是文档 ID 的差值,那么这个差值数组如下:
dtIds = [1, 3, 2, 3, 5, 3, 4, 4]
- 1
- 2
dtIds 数组中最大值为 5(0000 0101),其最少需要 3 bit 来表示,那么整个数组只需要 3 * 8 = 24 bit,相对于原来需要 40 bit 来存储数据,差值存储的方式可以有效降低存储的空间。探其究竟,其实是两个正整数间的差值会比它们间最大的那个要小,那么需要的有效位数就可能会减少了。
其实综合了上面所有的流程,无非就是文档 ID 使用增量编码,数据分块存储、数据按需分配存储空间,而这整个过程叫做 FOR(Frame Of Reference) 。
2.2.4.2 文档Id列表的交集求解
如果你需要检索朝代是唐代、诗人姓李、诗名中包含“明月”的诗,这时候系统会返回 3 条包含对应文档 ID 的列表,如下图: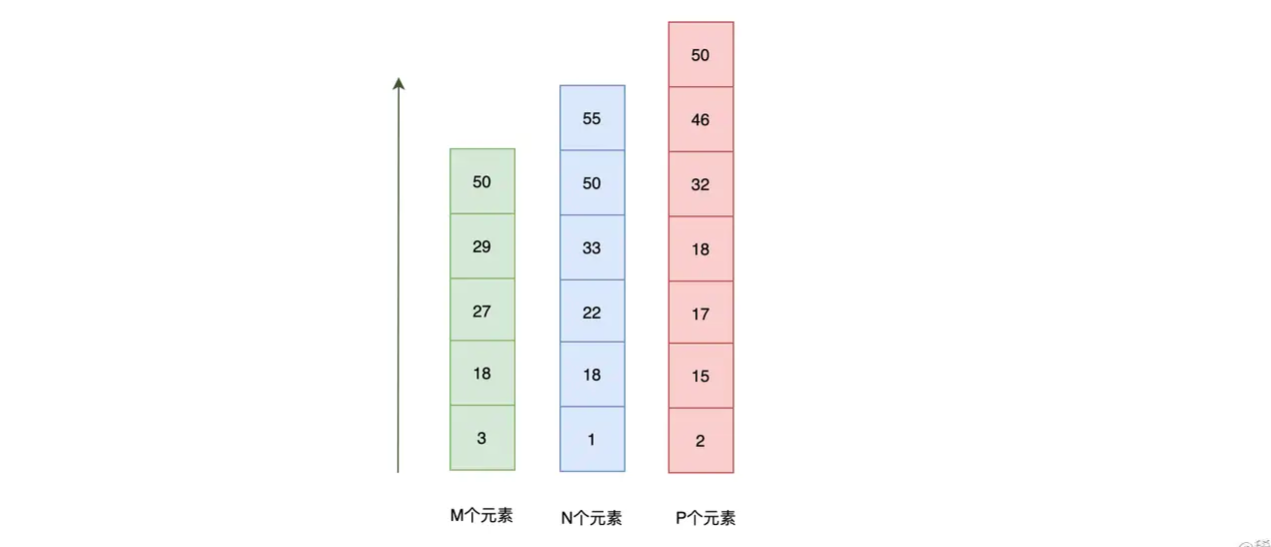
如果直接循环3个数组求交集,并不是很高效,下面对其进行优化。
- 位图
如果我们将列表的数据改造成位图会如何?假设有两个posting list A、B和它们生成的位图如下:
A = [2, 3, 5] => BitmapA = [0, 0, 1, 1, 0, 1]
B = [1, 2, 5] => BitmapB = [0, 1, 1, 0, 0, 1]
BitmapA AND BitmapB = [0, 0, 1, 0, 0, 1]
- 1
- 2
- 3
- 4
- 5
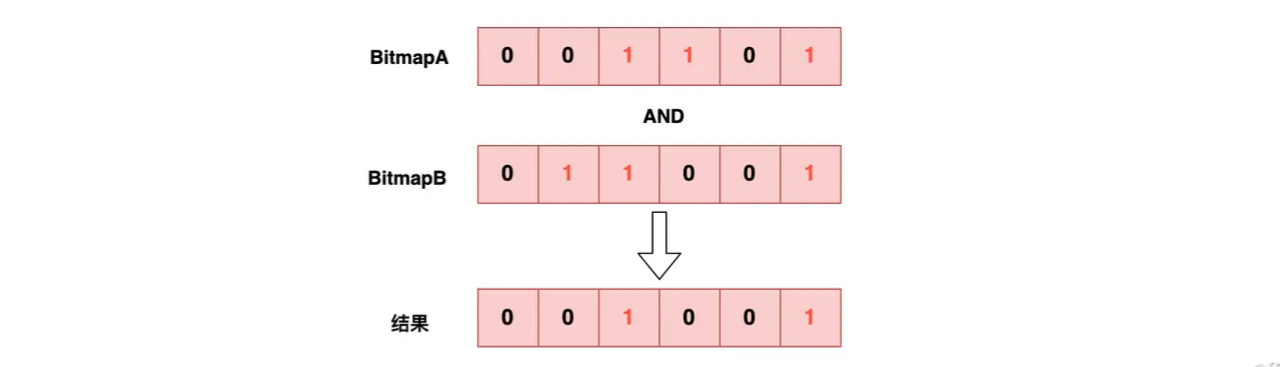
生成位图的方式其实很简单:Bitmap[A[i]] = 1,其他为 0 即可。这样我们可以将 A、B 两个位图对应的位置直接做 AND 位运算,由于位图的长度是固定的,所以两个位图的 AND 运算的复杂度也是固定的,并且由于 CPU 执行位运算效率非常高,所以在位图不是特别大的情况下,使用位图求解交集是非常高效的。
但是位图位图也有其致命的缺点,总结下来有这几点:
- 位图可能会消耗大量的空间。即使位图只需要1bit就可以表示相对应的元素是否存在,但是如果一个列表的有一个元素特别大,例如数组 [1, 65535],则需要 65535 bit 来表示。如果用 int32 类型的数组来表示的话,一个位图就需要 512M(2^32 bit = 2^29 Byte = 512M),如果有 N 个这样的列表,需要的存储空间为 N * 512M,这个空间开销是非常可怕的!
- 位图只适合数据稠密的场景
- 位图只适合存储简单整形类型的数据,对于复杂的对象类型无法处理,或者说复杂的类型本身就无法在CPU上直接使用AND这样的操作符
业界为了解决位图空间消耗大的问题,会使用一种压缩位图技术,也就是Roading Bitmap来代替简单的位图。Roadring Bitmap在业界应用广泛,下面来看看Roaring Bitmap的实现
- Roaring Bitmaps
它会把一个 32 位的整数分成两个部分:高 16 位和低 16 位。然后将高 16 位作为一个数值存储到有序数组里,这个数组的每一个元素都是一个块。而低 16 位则存储到 2^16 的位图中去,将对应的位置设置为 1。这样每个块对应一个位图,如下图: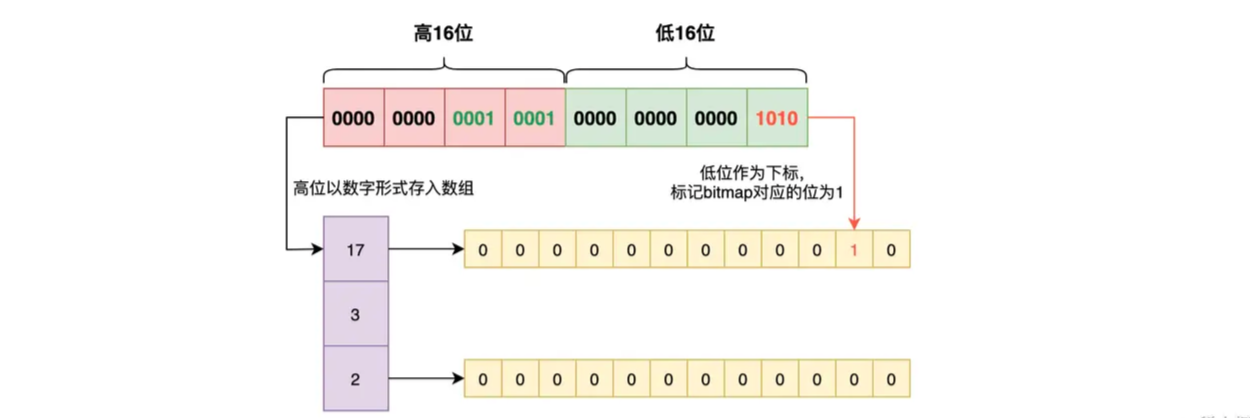
Roaring Bitmaps 通过拆分数据,形成按需分配的有序数组 + Bitmaps 的形式来节省空间。其中一个 Bitmaps 最多 2^16 个 bit,共消耗 8K。而由于每个块中存的是整数,每个数需要 2 个字节来存储即可,这样的整数共有 2^16 个,所以有序数组最多消耗 2 Byte * 2^16 = 128K 的存储空间。由于存储块的有序数组是按需分配的,所以 Roaring Bitmaps 的存储空间由数据量来决定,而 Bitmaps 的存储空间则是由最大的数来决定。举个例子就是,数组[0, 2^32 - 1],使用 Bitmaps 的话需要 512M 来存储,而 Roaring Bitmaps只需要 2 * (2 Byte + 8K)。
由于 Roaring Bitmaps 由有序数组加上 Bitmaps 构成,所以要确认一个数是否在 Roaring Bitmaps 中,需要通过两次查询才能得到结果。先以高 16 位在有序数组中进行二分查找,其复杂度为 O(log n);如果存在,则再拿低 16 位在对应的 Bitmaps 中查找,判断对应的位置是否为 1 即可,此时复杂度为 O(1)。所以,Roaring Bitmaps 可以做到节省空间的同时,还有着高效的检索能力。
但是机智的你不知道有没有看出来,如果每个块的 Bitmaps 一直消耗 8K 的存储是不是超级浪费?如果这一个块中的数据很少,或者很稀疏,那还不如把 Bitmaps 做成数组呢。那到底用数组还是用 Bitmaps,阈值在哪里呢?当数据量达到 4096 的时候,我们发现 4096 * 16 bit(2 Byte) = 8K,所以当一个块的数据量小于 4096 的时候,可以使用 short 类型的有序数组存储数据,并且使用变长数组进一步节省空间。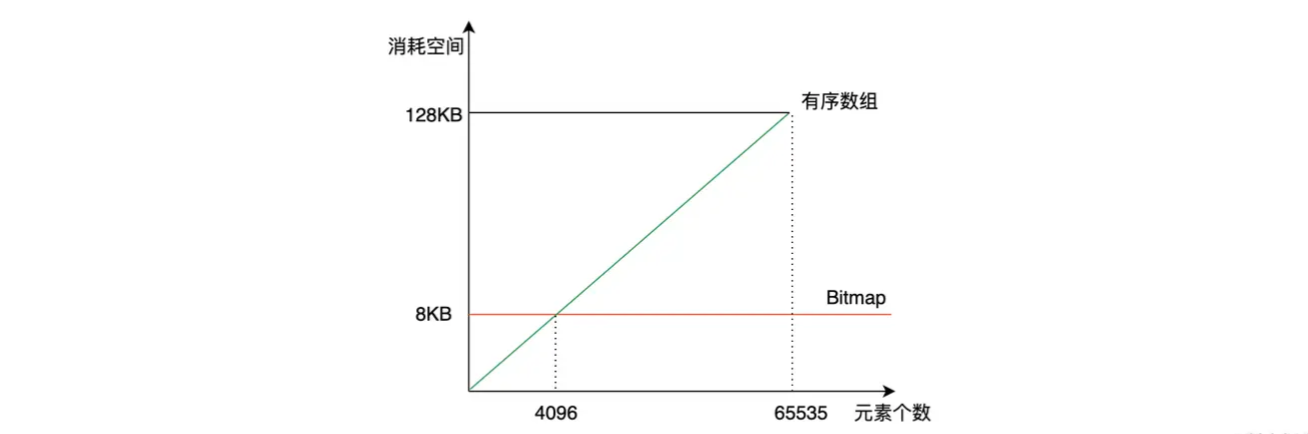
业界除了使用 Roaring Bitmaps 来求交集外,还使用了跳表。
- 使用跳表加速多个列表交集的求解
跳表是一种有序的数据结构,它通过在每个节点中维持多个指向其他节点的索引,从而达到快速访问的目的。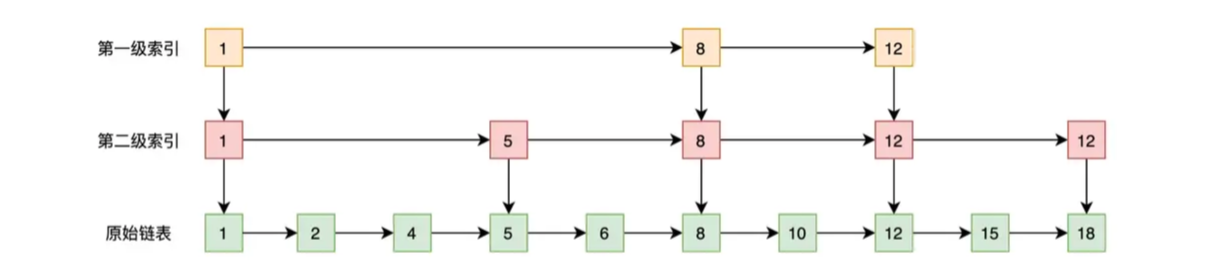
如上图,有序链表不能像有序数组那样使用二分法进行快速访问,但可以对有序链表维护一层或者多层索引使其快速访问。
在求解两个有序列表 A 和 B 的交集时,可以使用归并排序的方法来遍历两个列表,将复杂度从 O(M * N) 降低到 O(M + N),这里的 M、N 分别为这两个列表的长度。
链表归并求交集的过程可以总结为以下三个步骤。
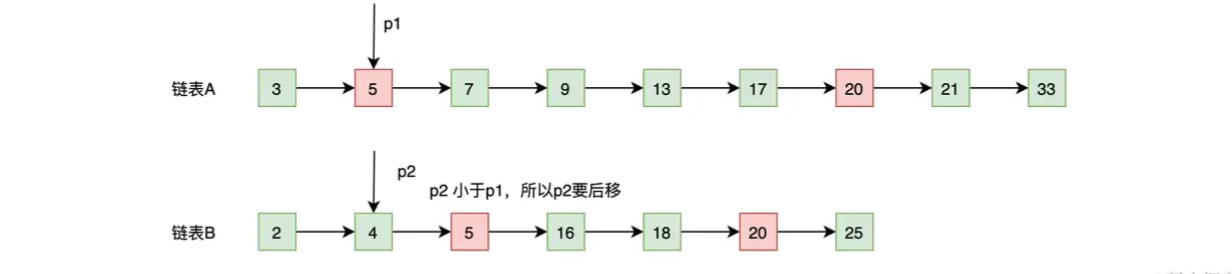
- 第一步:将指针 p1 和 p2 分别指向列表 A 和 B 的开头。
- 第二部:比较 p1 和 p2 指向的数据,会出现 3 种情况,如果内容相等,说明是公共元素,需要加入到结果集中;如果 p1 的内容小于 p2 的内容,p1 向后移;如果 p1 的内容大于 p2 的内容,p2 向后移。总结起来就是,谁小谁就往前走,相等就一起往前走,直到有一方结束!
- 第三步:重复第二步,直到 p1 或者 p2 到达链表尾为止。
这里我们再结合以下示意图和例子来加深一下对归并流程的理解。指针 p1 和 p2 的原位置如下图所示,下面我们就来看看它们是怎么移动的。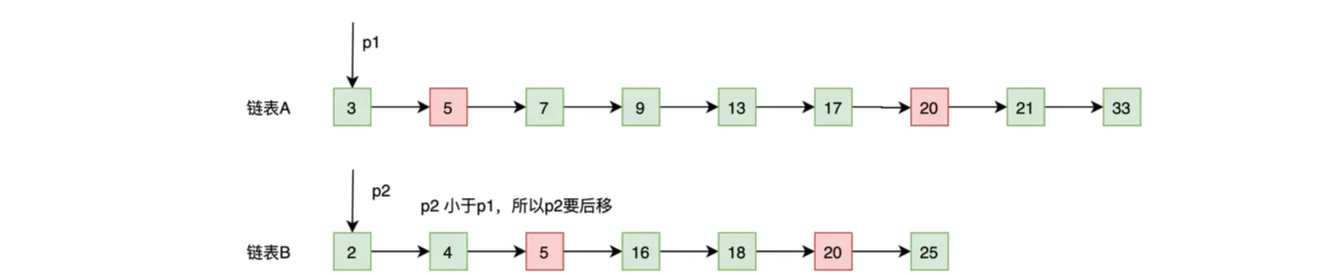
- p2 的内容小于 p1 的内容(2 < 3),基于谁小谁就往前走的原则,所以 p2 往后移动一位,移动后的结果如下图:
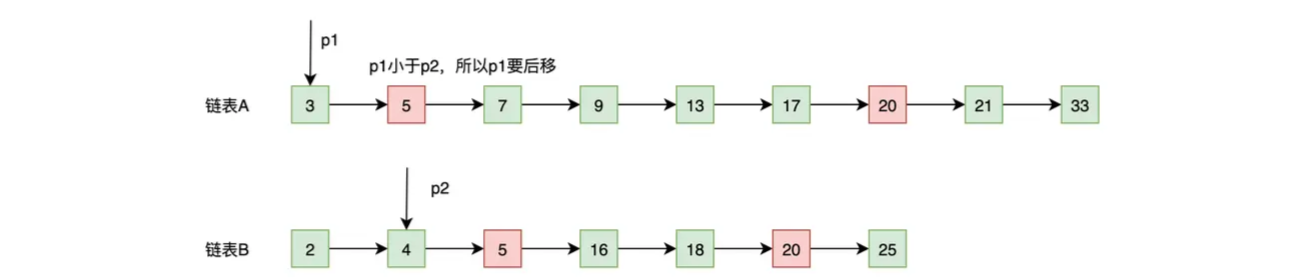
- p1 的内容小于 p2 的内容(3 < 4),基于谁小谁就往后走的原则,所以 p1 往后移动一位,移动后的结果如下图:
- p2 的内容小于 p1 的内容(4 < 5),基于谁小谁就往后走的原则,所以 p2 往后移动一位,移动后的结果如下图:
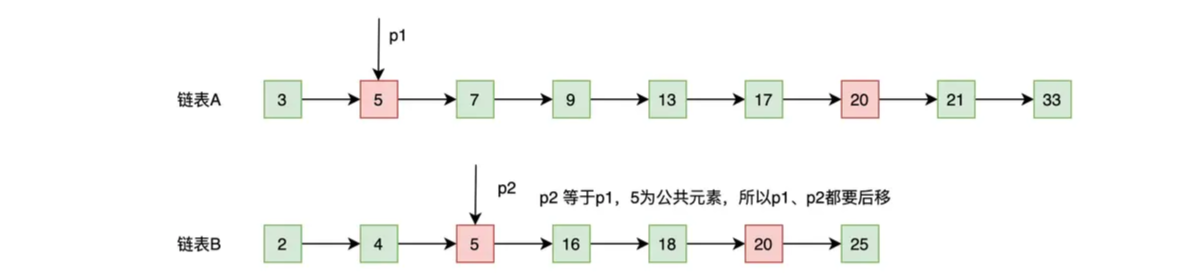
- p2 的内容等于 p1 的内容(5 = 5),所以 5 为公共元素,需要记录下来,并且基于相等就一起往后走的原则,所以 p2 和 p1 都往后移动一位,移动后的结果如下图:
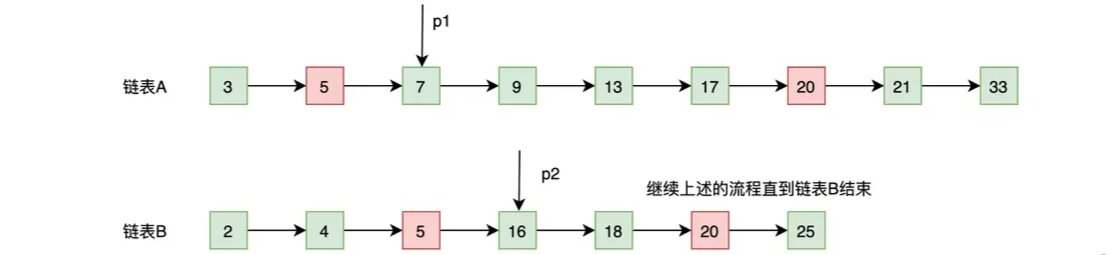
就这样,一直继续上述的流程直到链表B结束
归并排序的方式可以降低链表求交集的复杂度,但上述的算分还用优化的的地方。从下图中可以看出,此时 p1 要从 10 开始找直到多次才能找到 1000 这个大于或者等于 p2 的元素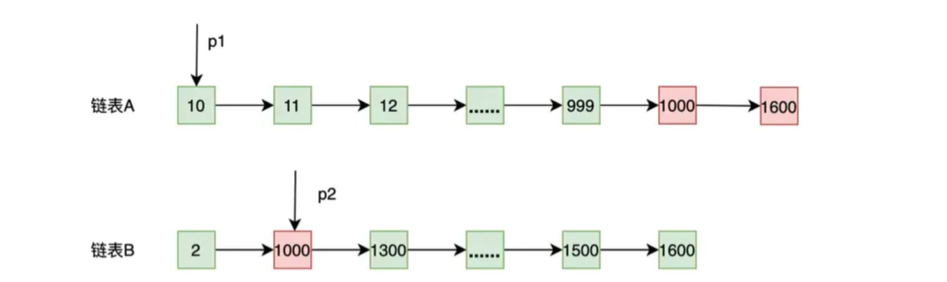
要优化这个问题,可以使用前面介绍的跳表,给链表做索引。下图中,p1 使用跳表索引经过比较少的次数就可以找到 1000 了。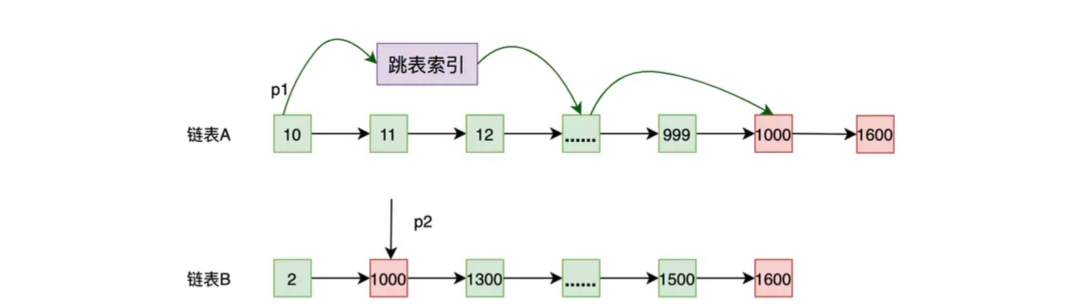
那既然链表 A 和 B 都有跳表索引的结构,那在链表 B 中查找数据也同样可以使用跳表索引的结构进行加速。如下图,当 p1 的值大于链表 B 当前值时,用 p1 的值当作 key,在链表 B 中使用二分查找,这样 p2 就可以使用跳表索引快速往前跳了。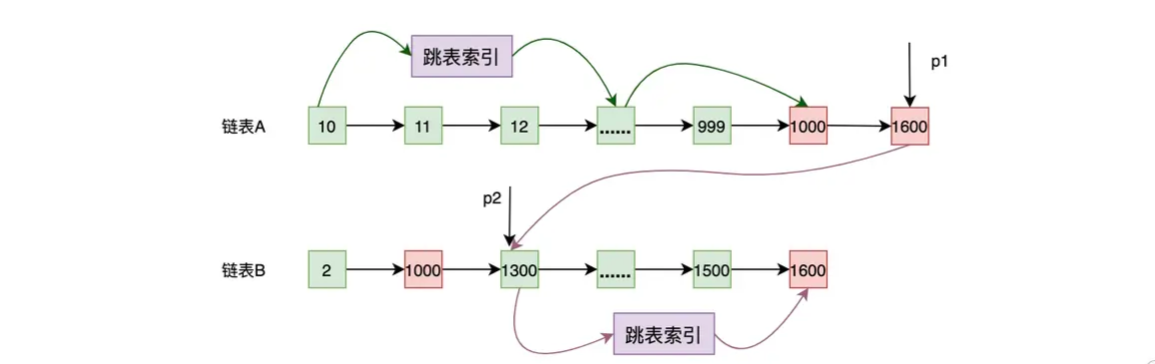
这种二分查找法可以总结为:谁当前值大,就用其作为 key 到其他列表中做二分查找。但是,需要说明的是,虽然使用跳表索引可以降低查询的复杂度,但是跳表索引是要消耗空间的,并且在构建跳表的时候,也需要消耗额外的时间!
总结
ES 中的倒排索引主要分为 3 个部分:Term Index、Term Dictionary 和 Posting List。
- Term Index 是 Term Dictionary 的索引,使用它可以快速判断一个 Term 是否存在,并且可以找到这个 Term 在 Term Dictionary 存储的块地址。Term Index 使用了 FST 来实现,其有着小巧且复杂度低的特点。
- 而 Term Dictionary 是存储 Term 信息的地方,其内容包括 Term、包含该 Term 的文档的数量、Term 在整个 Segment 中出现的频率等。
- 我们还学习了 Posting List 的实现,了解了 Lucene 使用 PackedBlock 和 VIntBlock 对整数进行压缩的思路,也介绍了业界使用 Roaring Bitmaps 和跳表来解决列表求交集的方案。

